КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Преобразование системы сил. Условия равновесия
|
|
|
|
Системы сил. Классификация сил
Силы, действующие в механизмах
Задачи динамики механизмов
Движение звеньев механизма происходит под действием различных сил. Вопрос об определении сил имеет большое значение при расчетах на прочность отдельных деталей, звеньев и кинематических пар механизмов; при расчетах на износ трущихся деталей в кинематических парах; определении потребной мощности; оценке точности механизма; при обосновании мощности двигателей систем автоматики и робототехники, следящих приводов; расчете быстродействия; регулировании скорости движения. Очень важно установление общих зависимостей между инерционными характеристиками звеньев, действующими на них силами и независимыми кинематическими характеристиками (обобщенными координатами) механизма. Использование дифференциальных уравнений движения механизма (уравнений Лагранжа) позволяет найти законы движения звеньев при известных силах и моментах сил, массах и моментах инерции звеньев, функциях положения, передаточных функциях. Отметим, что достоверность решения во многом зависит от правильного учета механической характеристики электродвигателя: для установившегося движения в математической модели используется статическая механическая характеристика, а при резких изменениях сил и их моментов – динамическая.
С помощью дифференциальных уравнений движения можно решить и обратную задачу – обеспечить заданное движение рабочих звеньев, изменяя их инерционные и силовые параметры.
Задачи динамики, как и кинематики механизмов решаются аналитическими, графоаналитическими и экспериментальными (исследование моделей или натурных образцов) методами.
|
|
|
Во время работы механизма к его звеньям приложены силы, определяющие их движение. Совокупность сил, действующих на тело, называется системой сил. Две системы сил называются эквивалентными, если их действие на тело одинаково. Сила, эквивалентная системе сил, называется равнодействующей системы. В зависимости от расположения сил в системе различают пространственные и плоские системы сил: системы сходящихся сил, системы параллельных сил.
Все силы, действующие на звенья механизма при его работе, можно разделить на движущие силы, силы полезных и вредных сопротивлений, силы тяжести звеньев.
Движущей силой Fдв [*] называется сила, действующая на ведущее звено механизма со стороны двигателя. Направление этой силы и скорости v точки ее приложения или совпадают, или образуют острый угол (0 ≤ α ≤ 90°), поэтому движущая сила совершает положительную работу (Wдв[†] > 0) (рис. 3.1). В измерительных приборах движущие силы – это силы воздействия среды на чувствительный элемент.
Силой полезного сопротивления Fпс называют силу, для преодоления которой предназначен механизм. Направление этой силы и скорости точки ее приложения или противоположны, или образуют тупой угол (90° ≤ α ≤ 180°) (см. рис. 3.1), работа этой силы отрицательна.
Рис. 3.1
Силами вредного сопротивления Fвс обычно являются силы трения в кинематических парах и силы сопротивления среды. Эти силы возникают при движении звеньев и совершают отрицательную работу. В некоторых механизмах, например, во фрикционных передачах, силы трения могут быть движущими силами.
Силы тяжести звеньев приложены в центрах масс звеньев. Под действием внешних сил в кинематических парах возникают силы, с которыми одно звено действует на другое – силы давления. Эти силы будем обозначать буквой  с двойным индексом, где первый индекс указывает номер звена, со стороны которого действует давление, а второй – номер звена, воспринимающего давление. Реакции связей, возникающие в кинематических парах, равны силам давлений, действующим на связь, но направлены в противоположные давлениям стороны. Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу. Реакции некоторых связей показаны на рис. 3.2. В поступательной паре линия действия реакции без учета сил трения перпендикулярна поверхности соприкосновения ползуна с направляющей (рис. 3.2, а), но точка приложения и величина реакции неизвестны. Во вращательной паре линия действия реакции проходит через геометрический центр О, но направление и величина реакции неизвестны (рис. 3.2, б). В этом случае реакцию
с двойным индексом, где первый индекс указывает номер звена, со стороны которого действует давление, а второй – номер звена, воспринимающего давление. Реакции связей, возникающие в кинематических парах, равны силам давлений, действующим на связь, но направлены в противоположные давлениям стороны. Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу. Реакции некоторых связей показаны на рис. 3.2. В поступательной паре линия действия реакции без учета сил трения перпендикулярна поверхности соприкосновения ползуна с направляющей (рис. 3.2, а), но точка приложения и величина реакции неизвестны. Во вращательной паре линия действия реакции проходит через геометрический центр О, но направление и величина реакции неизвестны (рис. 3.2, б). В этом случае реакцию  раскладывают на составляющие
раскладывают на составляющие  и
и  (рис. 3.2, в). Модуль определяется как
(рис. 3.2, в). Модуль определяется как  . В высшей кинематической паре реакция направлена вдоль общей нормали n – n к поверхности соприкосновения звеньев (рис. 3.2, г). Определение этих сил давлений имеет важное значение для расчета сил трения, обеспечения требуемой износостойкости и прочности.
. В высшей кинематической паре реакция направлена вдоль общей нормали n – n к поверхности соприкосновения звеньев (рис. 3.2, г). Определение этих сил давлений имеет важное значение для расчета сил трения, обеспечения требуемой износостойкости и прочности.
|
|
|
|
|
|
|
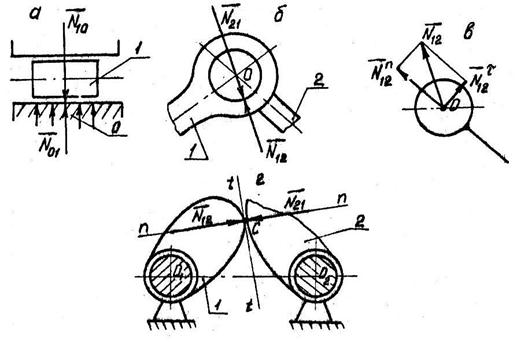
Рис. 3.2
При движении звеньев механизма с ускорениями на их точки действуют силы инерции ( ). Под влиянием этих сил в механизмах появляются дополнительные нагрузки, удары, колебания. Особенно большой величины силы инерции достигают в быстроходных и быстродействующих устройствах. Более подробно о силах трения и инерции будет сказано в п. 3.2.3, 3.2.4.
). Под влиянием этих сил в механизмах появляются дополнительные нагрузки, удары, колебания. Особенно большой величины силы инерции достигают в быстроходных и быстродействующих устройствах. Более подробно о силах трения и инерции будет сказано в п. 3.2.3, 3.2.4.
Условия передачи сил в механизме характеризуются углами давления γ. Угол давления γ для идеальных (без учета сил трения) связей измеряется между направлением вектора полной силы  , передаваемой на исполнительное звено, и вектором скорости v точки приложения этой силы. На рис. 3.3, а, б показаны углы давления γ в кривошипно-ползунном и кулачковом механизмах. При больших значениях γ может произойти заклинивание механизма в результате увеличения сил трения. В связи с этим необходимо так проектировать механизм, чтобы наибольшие углы давления не превышали допускаемых величин γadm [‡]: для кулачковых механизмов с поступательно движущимся толкателем γadm = 30 … 40°, для кулачковых механизмов с качающимся ведомым звеном (коромыслом) γadm = 45 … 50°.
, передаваемой на исполнительное звено, и вектором скорости v точки приложения этой силы. На рис. 3.3, а, б показаны углы давления γ в кривошипно-ползунном и кулачковом механизмах. При больших значениях γ может произойти заклинивание механизма в результате увеличения сил трения. В связи с этим необходимо так проектировать механизм, чтобы наибольшие углы давления не превышали допускаемых величин γadm [‡]: для кулачковых механизмов с поступательно движущимся толкателем γadm = 30 … 40°, для кулачковых механизмов с качающимся ведомым звеном (коромыслом) γadm = 45 … 50°.
|
|
|
Механизмы преобразуют не только движения, но и силы. Связь сил на ведущем и ведомом звеньях можно найти, используя понятие коэффициента полезного действия (КПД), который равен отношению мощности (работы) на выходе к мощности (работе) на входе:
η = Pp / Pд, (3.1)
где Pp, Pд – соответственно мощность на рабочем звене и на валу двигателя.
Мощность Р [§] связана с вращающим моментом Т и угловой скоростью соотношением
Р = Т · ω, (3.2)
где размерность мощности Р – в ваттах (Вт); вращающего момента Т – в ньютонах, умноженных на метр; угловой скорости ω – в радианах в секунду.
Учитывая зависимости (3.1) и (3.2) и понятие передаточного отношения (i = ωд / ωр), получим
Тр = Тд·i∙η, (3.3)
где Тр, Тд – соответственно вращающие моменты на рабочем звене и на валу двигателя.
|
|
|
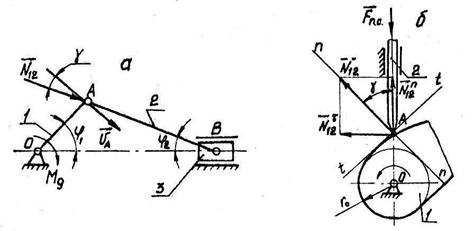
Рис. 3.3
Рис. 3.3
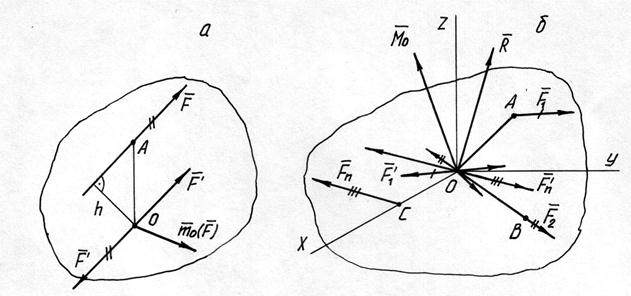
Обычно на тело или механизм действует система сил, как угодно расположенных в пространстве. Систему сходящихся сил можно заменить равнодействующей, приложенной в точке пересечения линий действия сил. Приведем произвольную систему сил к определенной точке тела. Пусть на тело действует одна сила F, приложенная в точке А, а нужно перенести ее параллельно в точку О (рис. 3.4, а). Чтобы получить эквивалентную систему, в точке О приложим уравновешенные силы  и
и  так, чтобы
так, чтобы  , а
, а  . Получим эквивалентную силе
. Получим эквивалентную силе  систему сил, состоящую из силы
систему сил, состоящую из силы  и пары сил с моментом m0 = m0() = Fh, где h – плечо силы относительно точки приведения. Любая пара сил характеризуется плоскостью действия, величиной и направлением момента пары. Все это можно выразить вектором момента пары сил
и пары сил с моментом m0 = m0() = Fh, где h – плечо силы относительно точки приведения. Любая пара сил характеризуется плоскостью действия, величиной и направлением момента пары. Все это можно выразить вектором момента пары сил  , который по модулю равен моменту пары, направлен перпендикулярно плоскости действия пары так, что если смотреть с конца вектора, то пара сил будет стремиться повернуть тело против часовой стрелки.
, который по модулю равен моменту пары, направлен перпендикулярно плоскости действия пары так, что если смотреть с конца вектора, то пара сил будет стремиться повернуть тело против часовой стрелки.
Рассмотрим теперь твердое тело, на которое действует произвольная система сил  (рис. 3.4, б). Выберем любую точку О за центр приведения и перенесем все силы системы в этот центр, присоединяя при этом соответствующие пары. Тогда на тело действует система сходящихся сил
(рис. 3.4, б). Выберем любую точку О за центр приведения и перенесем все силы системы в этот центр, присоединяя при этом соответствующие пары. Тогда на тело действует система сходящихся сил  , приложенных в центре О, и система пар сил, векторы моментов которых будут равны:
, приложенных в центре О, и система пар сил, векторы моментов которых будут равны: 
 …,
…,  .
.
|
|
|
Силы, приложенные в точке О, заменим одной силой  . Чтобы сложить все полученные пары, надо геометрически сложить векторы моментов этих пар. В результате система пар заменится одной парой сил
. Чтобы сложить все полученные пары, надо геометрически сложить векторы моментов этих пар. В результате система пар заменится одной парой сил  . Таким образом, любая система сил, действующих на твердое тело, при приведении к произвольно взятому центру О заменяется одной силой
. Таким образом, любая система сил, действующих на твердое тело, при приведении к произвольно взятому центру О заменяется одной силой  – главным вектором системы, приложенным в точке О, и одной парой
– главным вектором системы, приложенным в точке О, и одной парой  – главным моментом системы сил относительно центра О. Модули векторов и
– главным моментом системы сил относительно центра О. Модули векторов и  аналитически можно определить по их проекциям на оси координат (рис. 3.4, б):
аналитически можно определить по их проекциям на оси координат (рис. 3.4, б):
 ;
;
 ,
,
где Fkx, Fky, Fkz – проекции силы  соответственно на координатные оси OX, OY и OZ;
соответственно на координатные оси OX, OY и OZ;  ,
,  ,
,  – моменты силы относительно осей OX, OY и OZ.
– моменты силы относительно осей OX, OY и OZ.
|
|
|
Тело под действием системы сил будет находиться в покое, если
 и
и  , (3.4)
, (3.4)
или в проекциях на оси координат (в аналитической форме):
Rx = 
 . (3.5)
. (3.5)
Считают, что такая система сил находится в равновесии. Для равновесия произвольной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на координатные оси и суммы моментов всех сил относительно осей координат были равны нулю.
В зависимости от системы сил, действующей на тело, количество уравнений равновесия может быть и меньшим. Например, тело, на которое действует система сил в плоскости OXY (плоская), будет находиться в равновесии при следующих условиях:
Rx =  (3.6)
(3.6)
Уравнения (3.4–3.6) устанавливают условия равновесия свободных тел, на которые действуют различные системы сил. Если тело не свободно, т.е. на него наложены связи, то в условия равновесия помимо внешних сил входят силы реакций связей.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 709; Нарушение авторских прав?; Мы поможем в написании вашей работы!