КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кинетостатический расчет плоских рычажных механизмов. Уравновешивающие силы и момент
|
|
|
|
В основу метода кинетостатики положен принцип Д'Аламбера, согласно которому движущееся звено можно рассматривать как находящееся в покое, если к действующим на него заданным силам приложить силы инерции.
Будем считать, что нам заданы: кинематическая схема и размеры всех звеньев механизма; закон движения ведущего звена; массы звеньев; внешние силы, действующие на звенья; силы инерции.
Основная задача силового расчета механизма состоит в определении сил, действующих в кинематических парах, в нахождении уравновешивающих силы и момента. Сила, движущая ведущее звено механизма в рассматриваемом положении и уравновешивающая действие сил, приложенных к механизму, называется уравновешивающей силой (Fy = Fдв). Момент движущих сил, который в данном положении уравновешивает действие всех сил в механизме, носит название уравновешивающего момента (Мy = Мдв). Этот момент действует на ведущее звено со стороны двигателя, уравновешивая все силы, действующие на механизм, и обеспечивая его вращение вокруг оси.
Для определения неизвестных реакций и уравновешивающих силы и момента можно применить метод планов сил (графическое решение уравнения равновесия (3.4)). План сил можно построить для кинематической цепи, степень подвижности которой равна нулю.
При силовом исследовании механизм предварительно расчленяют на структурные группы нулевой подвижности (W = 0). При этом действие отсоединенных при расчленении механизма звеньев заменяется силами реакций. Силовой расчет начинается для структурной группы, которая в процессе образования механизма присоединена последней и заканчивается расчетом ведущего звена.
Рассмотрим силовой расчет на примере кривошипно-ползунного механизма (рис. 3.9, а) с равномерно вращающимся ведущим звеном 1.
|
|
|
На звенья механизма действуют силы тяжести (G1, G2, G3), приложенные в ц. м. звеньев. К ведомому звену 3 приложена сила полезных сопротивлений Fпс. Для приведения механизма в движение к ведущему звену приложен уравновешивающий момент My. Неподвижное звено обозначим цифрой 0.
Чтобы применить метод кинетостатики к звеньям механизма, приложим соответствующие силы инерции и моменты сил инерции (рис. 3.9, а), пользуясь планом ускорений механизма (рис. 3.9, д):

 ;
; 
 ;
;  и
и 


 .
.
Выделим группу 2–3 (рис. 3.9, б), заменив действие отброшенной части механизма (кривошипа 1) силой  , а связь в паре ползун – направляющая – реакцией
, а связь в паре ползун – направляющая – реакцией  . Так как ни величина, ни направление силы
. Так как ни величина, ни направление силы  неизвестны, разложим ее на составляющие с известными направлениями
неизвестны, разложим ее на составляющие с известными направлениями  . Векторное уравнение равновесия рассматриваемой группы запишется так:
. Векторное уравнение равновесия рассматриваемой группы запишется так:  .
.

|
|
|
|
|
|
|
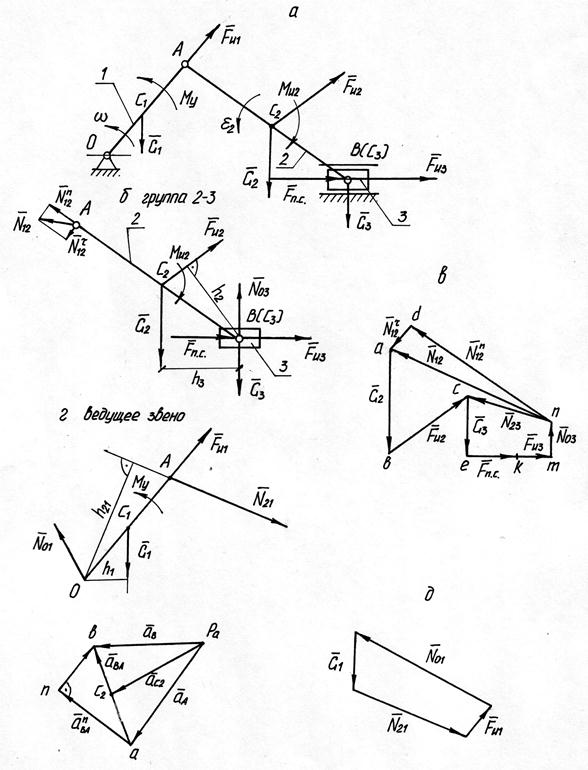
Для определения составляющей  рассмотрим равновесие звена 2, составив уравнение моментов всех сил относительно точки В:
рассмотрим равновесие звена 2, составив уравнение моментов всех сил относительно точки В:  или
или  или
или  , где
, где  – длина звена 2; h2, h3 – соответственно плечи сил
– длина звена 2; h2, h3 – соответственно плечи сил  и G2 относительно точки В (рис. 3.9, б).
и G2 относительно точки В (рис. 3.9, б).
Решая составленное уравнение, определим единственную неизвестную в нем величину – силу  .
.
Для определения  и
и  строим в выбранном масштабе μF (Н/мм) план сил (рис. 3.9, в). Для этого из точки d откладываем найденную силу в виде отрезка
строим в выбранном масштабе μF (Н/мм) план сил (рис. 3.9, в). Для этого из точки d откладываем найденную силу в виде отрезка  =
=  . К силе прикладываем силу G2 в виде отрезка
. К силе прикладываем силу G2 в виде отрезка  , далее откладываем поочередно в масштабе силы
, далее откладываем поочередно в масштабе силы  в виде отрезков
в виде отрезков  ,
,  ,
,  ,
,  . Через точку m проводим прямую в направлении реакции
. Через точку m проводим прямую в направлении реакции  , а через точку d – в направлении силы . Точка пересечения n этих прямых определит начало вектора и конец вектора . Соединив точку n с точкой а, получим величину и направление силы
, а через точку d – в направлении силы . Точка пересечения n этих прямых определит начало вектора и конец вектора . Соединив точку n с точкой а, получим величину и направление силы  ( = μF ·
( = μF ·  ), причем
), причем  . Реакцию
. Реакцию  определим из приведенного плана сил, рассматривая равновесие звена 3 (
определим из приведенного плана сил, рассматривая равновесие звена 3 ( ), отметим что
), отметим что  .
.
|
|
|
Теперь переходим к расчету ведущего звена механизма. На рис. 3.9, г, е показаны кривошип 1 с приложенными к нему силами и план сил, из которого легко можно найти реакцию  . Составив уравнение моментов сил, действующих на кривошип, относительно точки 0, найдем уравновешивающий момент из уравнения
. Составив уравнение моментов сил, действующих на кривошип, относительно точки 0, найдем уравновешивающий момент из уравнения  или
или  , или – G1h1 – N21h21 + My = 0, откуда My = = N21h21 + G1h1, где h21, h1 – плечи соответствующих сил N21, G1 относительно точки 0.
, или – G1h1 – N21h21 + My = 0, откуда My = = N21h21 + G1h1, где h21, h1 – плечи соответствующих сил N21, G1 относительно точки 0.
Зная уравновешивающий момент, можно найти уравновешивающую силу, приложенную в любой точке М ведущего звена и направленную перпендикулярно звену ОА Fy = My/  .
.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1474; Нарушение авторских прав?; Мы поможем в написании вашей работы!