КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механическая часть электропривода
|
|
|
|
Классификация электроприводов
В соответствии с ГОСТ Р 50369-92,ЭП классифицируются по следу-ющим характеристикам.
По количеству и связи исполнительных, рабочих органов. ЭП бывают:
1) индивидуальными, в которых рабочий исполнительный орган приводится одним самостоятельным двигателем, приводом;
2) групповыми, в которых один двигатель приводит в действие исполнительные органы РМ или несколько органов одного РМ;
3) взаимосвязанными, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддер-жания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ;
4) многодвигательными, в которых взаимосвязанные ЭП и ЭМП обеспечивают работу сложного механизма или работу на общий вал;
5) электрическими валами, взаимосвязанными ЭП, в которых для постоянства скоростей РМ, не имеющих механических связей, исполь-зуется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления ЭП бывают:
1) автоматизированные, управляемые путем автоматического регулирования параметров и величин;
2) программно-управляемые, функционирующие через посредство специализированных управляющих вычислительных машин в соответс-твии с заданной программой;
3) следящие, автоматически отрабатывающие перемещение испол-нительного органа РМ с заданной точностью в соответствии с произ-вольно меняющимся сигналом управления;
4) позиционные, автоматически регулирующие положение исполни-тельного органа РМ;
5) адаптивные, автоматически избирающие структуру или парамет-ры устройства управления с целью установления оптимального режима работы.
|
|
|
По характеру движения ЭП подразделяются:
1) на ЭП с вращательным движением;
2) линейные ЭП с линейными двигателями;
3) дискретные ЭП с ЭМП, подвижные части которых в установив-шемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства:
1) редукторные ЭП с редуктором или мультипликатором;
2) электрогидравлические с передаточным гидравлическим устрой-ством;
3) магнитогидродинамические ЭП с преобразованием электричес-кой энергии в энергию движения токопроводящей жидкости.
По роду тока ЭП подразделяются:
1) ЭП постоянного тока;
2) ЭП переменного тока.
У
равнение движения ЭП записывается как
 , Нм,
, Нм,
где М – вращающий момент двигателя, Нм;
МС – приведенный к валу двигателя момент сопротивления РМ, Нм;
J – приведенный к валу двигателя момент инерции ЭП, Нм2;
ω – угловая частота вращения двигателя, рад/с.
Величина Мдин = Jdω/dt называется динамическим или избыточ-ным моментом ЭП.
Из анализа уравнения движения ЭП следует, что:
1) при М > МС > 0, dω/dt > 0, т. е. имеет место ускорение привода;
2) при М < МС < 0, dω/dt < 0, т. е. имеет место замедление привода (очевидно, что замедление привода может быть и при отрицательном значении момента двигателя);
3) при М = МС = 0, dω/dt = 0, привод работает в установившемся режиме.
Мощность двигателя:
 ,Вт.
,Вт.
Поскольку ω = 2 πn / 60 = n / 9,55 (где n измеряется в об/мин), то:
 , Вт.
, Вт.
Номинальный момент двигателя можно вычислить по приводи-мым в паспорте номинальной мощности Рн и номинальной скорости вра-щения двигателя nн:
 , Нм.
, Нм.
Приведенный к валу двигателя момент сопротивления
 , Нм,
, Нм,
Где j и η – соответственно передаточное отношение и КПД передачи.
Приведенный к валу двигателя момент инерции ЭП, в котором со-четаются вращательное и поступательное движения (например, ЭП лифта рис. 2.1), вычисляется по формуле
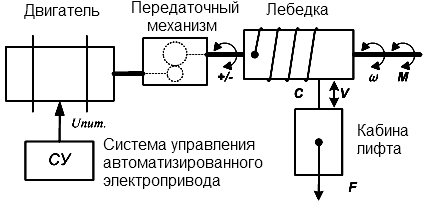
Рис. 2.1. ЭП лифта
|
|
|
где JД – моменты инерции ротора двигателя; JРМ – момент рабочего механизма, (редуктора и шкива); ω РМ – частота вращения рабочего механизма, рад/с; G – вес перемещаемого посредством ЭП груза, кг; v– линейная скорость перемещения груза м/с;g – ускорение силы тяжести,
9,8 м / с2.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 738; Нарушение авторских прав?; Мы поможем в написании вашей работы!