КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Импульсные системы регулирования постоянного тока
|
|
|
|
Импульсные преобразователи постоянного напряжения (ИППН) осуществляют преобразование одного постоянного напряжения UС в другое UВЫХ (рис. 6.13).
| Рис. 6.13. Структурная схема импульсного преобразователя |
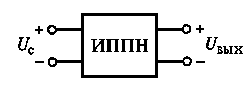 Основу принципа действия импульсного преобразователя составляет ключевой режим работы регулирующего полупроводникового прибора, посредством которого осуществля-ется периодическое подключение напряже-ния источника UС к выходной цепи преобра-зователя.
Основу принципа действия импульсного преобразователя составляет ключевой режим работы регулирующего полупроводникового прибора, посредством которого осуществля-ется периодическое подключение напряже-ния источника UС к выходной цепи преобра-зователя.
Область применения ИППН представляет ЭП постоянного тока, в котором с помощью преобразователя осуществляется управление часто-той вращения ДПТ. Диапазон использования по мощности – от сотен ватт до сотен киловатт.
По характеру решаемых задач все схемы ИППН разделяются на три класса; понижающие ИППН, для которых UВЫХ<UС; повышающие ИППН, для которых UВЫХ>UС; полярно-инвертирующие ИППН, осуществляющие изменение полярности выходного напряже-ния относительно общей для входа и выхода точки соединения. Приуправлении ДПТ применение получили первые два типа: с пос-ледовательно (рис.6.14) и параллельно (рис.6.15) соединенными полупроводниковыми преобразователями. Их области регулирования представлены соответственно на рис. 6.14,б и 6.15,б. Схема с пос-ледовательно соединенным управляемым полупроводниковым ключом (УПК) используется в двигательном режиме ДПТ, а с параллельно сое-диненным УПК – в генераторном ре-жиме.
Схема на рис. 6.14,а не позволяет изменять полярность выходного напряжения, в связи с чем ее называют нереверсивной.
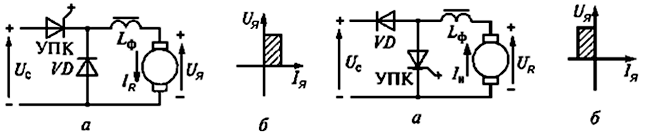 Схема нереверсивного двухквадрантного ИППН представлена на рис. 6.16,а.
Схема нереверсивного двухквадрантного ИППН представлена на рис. 6.16,а.
Рис. 6.14. Последовательный Рис. 6.15. Параллельный
|
|
|
импульсный преобразователь и импульсный преобразователь и
его область регулирования его область регулирования
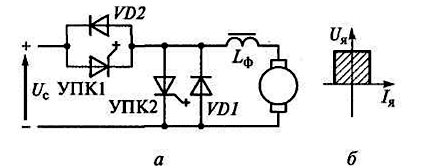
Рис. 6.16. Нереверсивный двухквадрантный импульсный преобразователь (а) и область регулирования (б)
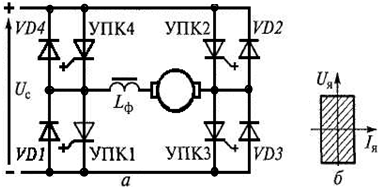
Реверсивные ИППН обеспечивают питание ДПТ напряжением обоих полярностей. Они выполняются по мостовой схеме соединения с обратными диодами (рис.5.17,а) и осуществляют работу ДПТ в двига-тельном и генераторном режимах при обоих направлениях вращения ротора. В режиме прямого пуска УПК1 и УПК2 открыты, а УПКЗ и УПК4 закрыты. В режиме реверса работают УПКЗ и УПК4, а УПК1 и УПК2 закрыты. При рекуперации энергия возвращается в источник диодами либо VD1 и VD2, либо VD3 и VD4. Область регулирования такого четырехквадрантного ИППН показана на рис. 6,17,б, его назвают бесконтактным (а часто и быстродействующим) реверсивным ЭП постоянного тока.
|
| Рис. 6.17. Схема реверсивного импульсного преобразователя (а) и возможная область регулирования (б) |
Управляемый полупроводниковый ключ рассматриваемых схем представлен двухоперационным (GTO) тиристором. Применяются и сило-вые транзисторы с полевым управлением: полевые МОП-транзисторы и биполярные транзисторы с изолирован-ным затвором (БТИЗ, IGBT). Транхисторы позволяют по-высить частоту переключе-ния и уменьшить габариты трансформаторов, дросселей, конденсаторов. Одно- и двух -операционные тиристоры применяются в ИППН повы-шенной мощности и при вы-соких питающих напряжениях.
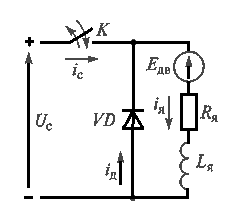
Рассмотрим работу системы при импульсном регулировании с помо-щью ее эквивалентной схемы замещения (рис. 6,18). t0 – характеризует время открытого состояния преобразователя; 4 – время его закрытого состояния; Т= t0 + t3 – период импульсов; y=t0/T – скважность импульса. Справедливы уравнения: для периода замкнутого состояния ключа К (переменные обозначены индексом 1):
 (6.17)
(6.17)
 , (6.18)
, (6.18)
 (6.19)
(6.19)
для периода разомкнутого состояния ключа (переменные обозначены
|
|
|
индексом 2);
 , (6.20)
, (6.20)
 , (6.21)
, (6.21)
 , (6.22)
, (6.22)
 где МС и J – момент статической нагрузки на валу двигателя и момент инерции; ФНОМ – номинальный поток; RЯ и LЯ – активное и индуктивное сопротивления якор-ной цепи.
где МС и J – момент статической нагрузки на валу двигателя и момент инерции; ФНОМ – номинальный поток; RЯ и LЯ – активное и индуктивное сопротивления якор-ной цепи.
Принято, что внутреннее соп-ротивление источника напряжения пренебрежимо мало, а сопротив-ление диода равно нулю в прово-дящем направлении и бесконеч-ности – в обратном.
| Рис. 6.18. Эквивалентная схема системы «Импульсный преобразователь – ДПТ НВ |
Чтобы найти зависимости между средними значениями тока, момента, скорости, напряжения, надо проинтегрировать приведен-ные уравнения за период коммута-ции.
Полагая, что за время T мо-мент Мс = const, из уравнений (6.19) и (6.22) можно найти

Для установившегося режима должно соблюдаться соотношение  , т.е. мгновенные значения скорости в начале и конце периода должны быть равны друг другу, так как в противном случае имеет место переходный процесс, а не квазиустановившийся режим. Учитывая также, что t0+ t3 = Ть, из предыдущего выражения можно найти
, т.е. мгновенные значения скорости в начале и конце периода должны быть равны друг другу, так как в противном случае имеет место переходный процесс, а не квазиустановившийся режим. Учитывая также, что t0+ t3 = Ть, из предыдущего выражения можно найти
 .
.
Отсюда в соответствии с (6.18) и (6.21)
 . (6.23)
. (6.23)
С другой стороны, из (6.17) и (6.20)


 .
.

где учитывая, что в установившемся режиме  , и что t0/T = у, находим
, и что t0/T = у, находим
 .
.
Отсюда уравнение скоростной характеристики рассматриваемой системы импульсного регулирования имеет вид
 (6.24)
(6.24)
Подставляя в это выражение (5.23), получим уравнение механичес-кой характеристики:
 . (6.25)
. (6.25)
Механические и скоростные характеристики представляют собой параллельные прямые, отсекающие на оси ординат отрезки:
При допущении, что сопротивление диода равно нулю, жесткость механических характеристик для рассматриваемой системы равна жесткости естественной механической характеристики:
Выражения (6.24) и (6.25) справедливы в случае, когда в цепи якоря проходит непрерывный ток. Если же в период отключенного состояния ключа ток IЯ успевает снизиться до нуля, то имеет место режим прерывистого тока. Движение системы во время паузы тока связано с большим расходом запаса кинетической энергии и соотношение между  и IСР изменяется.
и IСР изменяется.
Из (6.17)...(6.22) следует, что на каждом из интервалов замкнутого и разомкнутого состояний ключа поведение системы описывается дифференциальными уравнениями второго порядка. Однако для прак-тических расчетов, учитывая реальное соотношение параметров системы, можно считать, что за период коммутации скорость ЭП остается неизменной, т.е. в этом случае характер изменения тока якоря за период коммутации определяется уравнениями (5.17) и (5.20),
|
|
|
 ,
,
которые при принятом допущении являются линейными дифферен-циальными уравнениями первого порядка. Их решение имеет следующий вид:
 ,
,  ,
,
 ,
,
 ,
,
 ,
,  ,
,
где IНАЧ1, IНАЧ2 токи якоря в начале первого и второго интервалов работы ключа К.
После математических преобразований, можно показать, что гра-ничный ток равен
 . (6.26)
. (6.26)
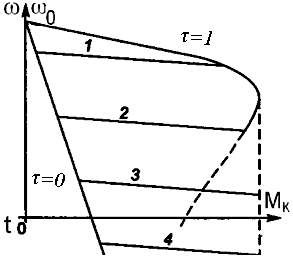
Рис.6.20. Скоростные характеристики системы с импульсным регулированием
Граничный ток изменяется при регулировании скорости. Наи-большего значения граничный ток достигает при у = 1/2:
 (6.27)
(6.27)
а при у = 1 и у = 0,IГР = 0. Это объясняется тем, что в первом случае якорь двигателя все время подключен к сети, а во втором имеет место режим динамического торможения при отсутствии дополнительного сопротивления в цепи якоря.
Скоростные (механические) характеристики системы с импульсным регулированием приведены на рис. 6.20. В режиме прерывистого тока независимо от значения yскорость ХХ ω0 = иС (сФ). Жесткость меха-нических характеристик резко снижается, поэтому стремятся к тому, чтобы система не работала в зоне прерывистого тока.
Импульсное регулирование применяется в системах подземного транспорта, троллейбусах, электрокарах, получающих питание от сетей или источников постоянного тока неизменного напряжения.
Пример 6.3.1. Скорость двигателя постоянного тока независимого возбуждения регулируется по схеме рис. 6.15. Напряжение сети пос-тоянного тока 120В, сопротивление якоря Rя = 0,5Ом, индуктивность Lя = 20 мГн, сФ – 0,5 В с. Двигатель нагружен постоянным моментом, которому соответствует ток якоря 20 А. Определить диапазоны регу-лирования скорости и скважности, считая ток якоря непрерывным.
Решение
Минимальная скорость, при которой ЕЯ = 0, также равна нулю. Из уравнения (6.6) для якорной цепи двигателя:
|
|
|
 .
.
Определяем скважность

Максимальная скорость соответствует скважности у=1, при которой  поэтому
поэтому

Находим угловую скорость двигателя:
 .
.
Таким образом, диапазон регулирования скорости составляет
0<ω<220рад/с, а диапазон регулирования скважности 0,082 <у<1.
Контрольные вопросы
1. Напишите уравнения электромеханической и механической ха-рактеристик ДПТ НВ при его питании от ТП.
2. Нарисуйте структурную схему ДПТНВ при питании от одно-фазного преобразователя. Чем отличаются полу- и полностью управ-ляемые преобразователи?
3. Задача. Частота вращения ДПТ НВ – 900 мин-1, Р1 = 15 кВт, U = 300 В. Двигатель питается от трехфазного управляемого выпрямителя, отаналогичного выпрямителя питается цепь возбуждения; напряжение на выпрямителе UЛ = 208 В, частота f = 50 Гц. Сопротивление RЯ = 0,25 Ом, цепи возбуждения RB = 146 Ом; постоянная напряжения КИ = 1,2 (В/А) рад/с. Считать, что отсутствуют потери на трение и пульсации в цепи якоря и возбуждения. Необходимо:
а) определить угол регулирования α по цепи якоря при условии, чтодвигатель работает при максимальном токе возбуждения, при момен-те М = 116 Нм и частотевращения 900 мин-1;
б) для случая, когда ток выпрямителя максимален, угол α = 0, М= 116 Нм, определить скорость двигателя;
в) для той же нагрузки, что и в п. 5(М = 116 Нм), определить угол регулирования по цепи возбуждения, если частота вращения возросла до
1800 мин-1.
4. Объясните принцип работы ДПТ НВ с импульсными регуля-торами напряжения. Как можно менять скважность импульсов преоб-разователя?
5. Нарисуйте характеристики работы ДПТ НВ с импульсным регуля-тором. Что такое зона прерывистых токов? Чем она определяется?
6. Задача. ДПТ НВ работает с импульсным регулятором от сети постоянного тока 600 В. Сопротивление якоря RЯ = 0,05 Ом, постоянная напряжения КИ = 1,527 (В/А)рад/с. Среднее значение тока якоря IЯ = 250 А, ток возбуждения IВ = 2,5 А. Считать, что в токе якоря отсутствуют пульсации.
Для случая, когда рабочий цикл преобразователя (ключа) 60 %, оп-ределить:
1) мощность, потребляемую от источника питания;
2) эквивалентное входное сопротивление;
3) скорость двигателя;
4) развиваемый момент.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 2519; Нарушение авторских прав?; Мы поможем в написании вашей работы!