КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Сасинхронными двигателями
|
|
|
|
ЗАМКНУТЫЕ СХЕМЫ УПРАВЛЕНИЯЭЛЕКТРОПРИВОДА
| З |
амкнутая схема «тиристорный регулятор напряжения – асинхрон-ный двигатель» (ТРН-ДД) с использованием ОС по его скорости (рис. 9.1,а). Силовую часть образуют три пары встречно-параллельно соединенных тиристоров VS1-VS6.
Управляющие электроды тиристоров подсоединены к выходам СИФУ, которая распределяет управляющие импульсы на все тиристоры и осуществляет их сдвиг в зависимости от входного сигнала управления Uy. К валу двигателя, который в этой схеме имеет фазный ротор, для реализации ОС по скорости подсоединен тахогенератор ТГ. Его ЭДС  сравнивается с задающим напряжением скорости UЗ.С снимаемым с задающего потенциометра ЗП, причем эти напряжения действуют навстречу друг другу, а их разность образует сигнал управления
сравнивается с задающим напряжением скорости UЗ.С снимаемым с задающего потенциометра ЗП, причем эти напряжения действуют навстречу друг другу, а их разность образует сигнал управления
 , (9.1)
, (9.1)
который поступает на вход СИФУ. При увеличении этого сигнала угол управления тиристорами α уменьшается, подаваемое на двигатель напряжение увеличивается, и наоборот.
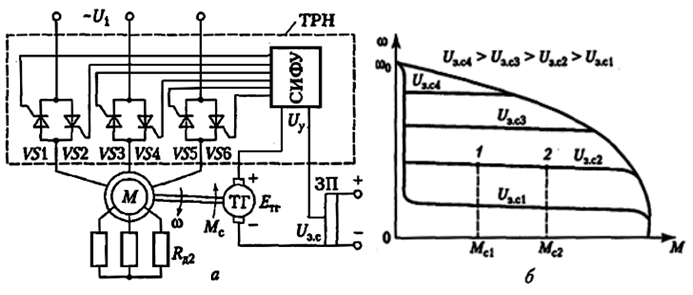
Рис. 9.1. Схема (а) и характеристики (б) замкнутой системы асинхронного ЭПс использованием тиристорного регулятора напряжения
При снижении скорости двигателя в цепи ротора увеличиваются потери мощности (потери скольжения), которые вызывают дополни-тельный нагрев АД, снижая экономичность работы ЭП. Для облегчения теплового режима двигателя при его работе на пониженных скоростях в цепь ротора двигателя включен добавочный резистор RД2, наличие которого позволяет также расширить диапазон регулирования скорости.
Рассмотрим работу ЭП при изменении момента нагрузки Mс на валу двигателя и постоянном задании скорости Uз.c2. Допустим, что в исходном положении двигатель работал в т. 1 при моменте нагрузки Мс1 (рис. 9.1,б), азатем произошло его увеличение до значения Мс2.
При увеличении нагрузки на валу двигателя его скорость начнет снижаться, соответственно начнет уменьшаться и ЭДС тахогенератора ЕТГ. Уменьшение ЕТГ вызывает, согласно (9.1), увеличение напряжения управления Uy, что приведет к уменьшению угла управления тирис-торами α и увеличению, тем самым, подаваемого на двигатель напря-жения. Момент двигателя будет увеличиваться и в т. 2 сравняется с Мс. Таким образом, увеличение момента нагрузки привело к небольшому снижению скорости двигателя, т.е., другими словами, его характерис-тики в схеме рис. 9.1,а стали жесткими.
При уменьшении момента нагрузки Мс будет автоматически сни-жаться напряжение на двигателе и поддерживаться его скорость вращения на заданном уровне.
Изменяя с помощью потенциометра ЗП значение задающего напря-жения UЗ.С, можно получить ряд механических характеристик ЭП с отно-сительно высокой жесткостью и необходимой перегрузочной способ-ностью двигателя.
Выражение (9.1) является исходным для получения формул расчета параметров схемы на рис. 9.1, а. Используя уравнения связи выходного U1 и входного управляющего Uy напряжений ТРН
 ,
,
а также момента двигателя и приложенного к нему напряжения в отно-сительной форме
 ,
,
получаем после последовательной подстановки (4.17) и (4.18) в (4.16) и несложных преобразований
 ,
,
где перепад скорости ∆ω соответствует изменению момента нагрузки в пределах MС2 – MСl.
Замкнутая схема импульсного регулирования скорости АД с помощью резистора в цепи ротора
В схеме ЭП (рис. 9.1,а) с импульсным регулированием сопротивления в цепи выпрямленного тока ротора для получения жестких характеристик использована отрицательная ОС по скорости двигателя. В роторную цепь двигателя включен неуправляемый трехфазный выпрямитель В, к выхо-ду которого подключен резистор RД2. Параллельно резистору включен управляемый полупроводниковый ключ.
Управление ключом происходит от ШИМ, на вход которого поступают сигналы задания Uз.си ОСUo.c по скорости. При поступлении на вход блока ШИМ сигнала ошибки (Uy=Uз.с–Uo.c) он начинает генерировать импульсы управления. Эти импульсы с помощью СУ ключом (СУК) вызывают периодическое включение и закорачивание резистора RД2.
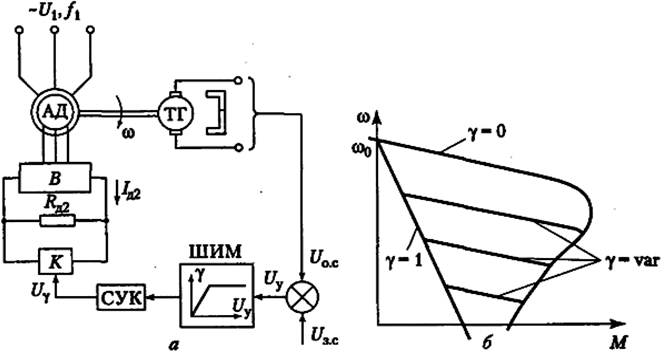
Рис. 9.2. Схема (а) и характеристики (б)замкнутой системы асинхронного двигателя
Принцип получения жестких характеристик ЭП соответствует механизму действия ОС по скорости и состоит в следующем. Допустим, что двигатель работает в установившемся режиме при каком-то заполнении (скважности) ключа К и соответствующем эквивалентном сопротивлении цепи ротора. Пусть по каким-то причинам произошло увеличение момента нагрузки двигателя, в результате чего начнет снижаться его скорость. Тогда, в соответствии с формулой (9.1), для сигнала управления Uy, он начнет повышаться, что вызовет увеличениезаполнения у работы ключа К иуменьшение тем самым эквивалентного сопротивления в цепи ротора К2зкв = (1 – γ)Rд2. Это в свою очередь, приведет к увеличению тока в роторе и момента двигателя и прекращению снижения скорости, что соответствует жестким характеристикам ЭП, показанным на рис. 9.2,б.
В схеме может быть достигнуто регулирование (ограничение) и тока, и момента, для чего она должна быть дополнена контуром регули-рования тока. В этом случае механические характеристики имеют вертикальный участок, соответствующий заданному уровню ограниче-ния тока и момента.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1141; Нарушение авторских прав?; Мы поможем в написании вашей работы!