КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Профилировка, крутка лопасти НВ
|
|
|
|
Форма лопасти НВ в плане
Хорда лопасти НВ
Длина хорды b лопасти НВ может быть определена по формуле
 . (3.25)
. (3.25)
Лопасти НВ вертолетов могут иметь прямоугольную, трапециевидную или смешанную форму в плане.
Выгодными считаются лопасти трапециевидной формы с сужением к концу (η = 2…3). Но поскольку влияние формы лопасти на величину тяги НВ относительно невелико (сравнительно с влиянием других параметров), то наиболее распространены в вертолетостроении лопасти НВ прямоугольной формы.
В целях получения наилучшего аэродинамического качества лопасти НВ ее проектируют с переменным по размаху профилем (аэродинамическая крутка лопасти) и/или с переменным углом (Δφ) установки профилей в сечениях лопасти (геометрическая крутка).
В комлевом сечении лопасти, как правило, используют профили с большей толщиной (например, профиль NACA 23015), чем на законцовке (профиль NACA 23012). Лопасти НВ вертолетов имеют отрицательную, обычно линейную крутку, так что у комля они работают на больших углах атаки (рис. 3.6). Это дает более равномерное распределение аэродинамических сил вдоль лопасти и уменьшает индуктивные потери НВ, вызываемые неравномерностью распределения потока. Геометрическую крутку задают, ориентируясь на статистические данные. Чаще всего на легких вертолетах крутка лопасти НВ составляет Δφ = -5…-9°.
Таким образом, недостаточная эффективность из-за малой окружной скорости ωr комля по сравнению с окружной скоростью конца лопасти частично компенсируется: ростом коэффициента подъемной силы су (посредством увеличения угла атаки α за счет переменного профиля (рис. 3.7)) и/или увеличением хорды лопасти.
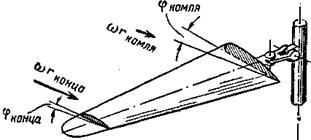 Рис. 3.6. Геометрическая крутка лопасти НВ вертолета Рис. 3.6. Геометрическая крутка лопасти НВ вертолета
| 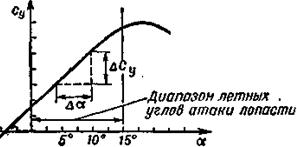 Рис. 3.7. Зависимость су от α профилей лопасти НВ Рис. 3.7. Зависимость су от α профилей лопасти НВ
|
3.4.10. Относительное аэродинамическое сопротивление
легкого вертолета
|
|
|
Относительное (удельное) аэродинамическое сопротивление легкого вертолета с полозковым шасси (на этапе предварительного проектирования вертолета) может быть определено по графикам рис. 3.8 [11] или по формулам* [28, 99]:
 , (3.26)
, (3.26)
где  и
и  ‒ эмпирические коэффициенты:
‒ эмпирические коэффициенты:
 ;
;  ,
,
 = 0,018,
= 0,018,  = 0,5646 – вертолеты с неубирающимся шасси;
= 0,5646 – вертолеты с неубирающимся шасси;
 = 0,0174,
= 0,0174,  = 0,5364 – вертолеты с убирающимся шасси;
= 0,5364 – вертолеты с убирающимся шасси;
 = 0,0102,
= 0,0102,  = 0,5364 – перспективные вертолеты;
= 0,5364 – перспективные вертолеты;
 = 0,0061,
= 0,0061,  = 0,5364 – вертолеты-самолеты.
= 0,5364 – вертолеты-самолеты.
.............................
* ‑ размерность в формулах (3.26):  ‑ в кг; ΣсхSЭ ‑ в м2.
‑ в кг; ΣсхSЭ ‑ в м2.
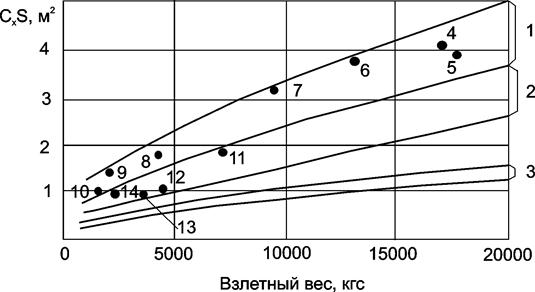 Рис. 3.8. Изменение сопротивления "вредной" пластинки, эквивалентной вертолету в зависимости от его взлетного веса:
1 – типовые вертолеты; 2 ‑ вертолеты нового поколения и перспективные; 3 ‑ самолеты; 4 ‑ Сикорский СН-53А; 5 ‑ Боинг-Вертол СН-47; 6 ‑ Аэроспасьяль SA.321; 7 ‑ Сикорский S-61N; 8 ‑ Белл UH-1B; 9 ‑ Аэроспасьяль ²Алуэтт III²; 10 ‑ Аэроспасьяль SA.341; 11 ‑ Аэроспасьяль SA.330J; 12 ‑ Сикорский S-76; 13 ‑ Белл 222; 14 ‑ Агуста А.109
Рис. 3.8. Изменение сопротивления "вредной" пластинки, эквивалентной вертолету в зависимости от его взлетного веса:
1 – типовые вертолеты; 2 ‑ вертолеты нового поколения и перспективные; 3 ‑ самолеты; 4 ‑ Сикорский СН-53А; 5 ‑ Боинг-Вертол СН-47; 6 ‑ Аэроспасьяль SA.321; 7 ‑ Сикорский S-61N; 8 ‑ Белл UH-1B; 9 ‑ Аэроспасьяль ²Алуэтт III²; 10 ‑ Аэроспасьяль SA.341; 11 ‑ Аэроспасьяль SA.330J; 12 ‑ Сикорский S-76; 13 ‑ Белл 222; 14 ‑ Агуста А.109
|
3.5. Потребная энерговооруженность вертолета
Для современных вертолетов характерными (расчетными)
режимами полета [90] принято считать: висение на статическом
потолке  = 1000...1500 м; полет на динамическом потолке
= 1000...1500 м; полет на динамическом потолке  ; полет с максимальной скоростью
; полет с максимальной скоростью  = 250…300 км/ч на высоте
= 250…300 км/ч на высоте  = 500 м; продолженный взлет при отказе одного двигателя (другой работает на чрезвычайном режиме). Каждый из расчетных случаев характеризуется потребной мощностью для привода НВ и РВ и величиной потерь мощности. Потребная энерговооруженность вертолета
= 500 м; продолженный взлет при отказе одного двигателя (другой работает на чрезвычайном режиме). Каждый из расчетных случаев характеризуется потребной мощностью для привода НВ и РВ и величиной потерь мощности. Потребная энерговооруженность вертолета
определяется максимальным значением мощности двигателя на
заданном режиме полета.
Мощность силовой установки (мощность двигателя) для каждого
режима рассчитывают через удельную мощность  ,
,
потребную для привода несущего винта на соответствующем режиме полета. При этом удельную мощность приводят к мощности на
высоте = 0 ( ) и при
) и при  = 0 (
= 0 ( ) с учетом степени дросселирования двигателей
) с учетом степени дросселирования двигателей  в зависимости от режима и коэффициента
в зависимости от режима и коэффициента
использования мощности  :
:
|
|
|
 , (3.27)
, (3.27)
где “ 0 ”‑ индекс приведения;  ‑ коэффициенты, учитывающие изменение располагаемой мощности двигателя в зависимости от высоты, скорости полета и дросселирования двигателя:
‑ коэффициенты, учитывающие изменение располагаемой мощности двигателя в зависимости от высоты, скорости полета и дросселирования двигателя:
 = 1 – 0,0695· ( в км); (3.28)
= 1 – 0,0695· ( в км); (3.28)
 = 1 + 5,5·10-7·
= 1 + 5,5·10-7·  ( в км/ч). (3.29)
( в км/ч). (3.29)
При вычислении и используются значения и ,
соответствующие рассматриваемому расчетному режиму (табл. 3.5).
Таблица 3.5
| Параметры полета | Висение на статическом потолке | Полет на динамическом потолке | Горизонтальный полет на максимальной скорости | Продолженный взлет при отказе одного двигателя |
| , км
|
|
| ||
| , км/ч
| 
|
| 
|
Коэффициент использования мощности в общем случае
является функцией скорости  (рис. 3.9).
(рис. 3.9).
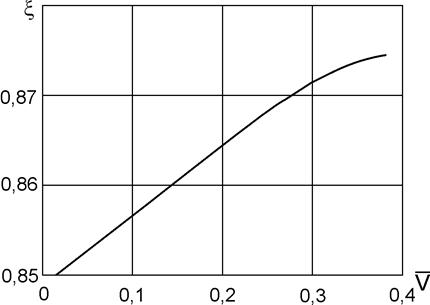 Рис. 3.9. Зависимость
Рис. 3.9. Зависимость
|
На режиме висения для легких вертолетов можно принять [28]:
x = 0,84…0,86 при m0 < 10000 кг.
На экономической скорости горизонтального полета, обеспечивающей минимальный расход топлива, следует принять  = 0,865;
= 0,865;
на максимальной ‑  = 0,875; на крейсерской ‑
= 0,875; на крейсерской ‑  = 0,872.
= 0,872.
В табл. 3.6 приведены значения постоянных и переменных
потерь эффективной мощности двигательной установки при передаче ее на несущий винт трансмиссией [28]:  .
.
Таблица 3.6
| Характеристики потерь | Виды потерь эффективной мощности двигателя при передаче ее на несущий винт вертолета | Коэффициенты потерь мощности, 
|
| Постоянные потери мощности | Привод рулевого винта: ‑ на режиме висения; ‑ на режиме горизонтального полета | 0,08...0,12 0,02...0,04 |
| Привод агрегатов двигателя и вертолета | 0,01 | |
| Трение в трансмиссии | 0,03 | |
| Привод вентилятора охлаждения | 0,015 | |
| Гидравлические сопротивления входных устройств | 0,025 | |
| Временные потери мощности | Воздушно-тепловая противообледенительная система | 0,04 |
| Пылезащищенное устройство (ПЗУ): ‑ ПЗУ выключено; ‑ ПЗУ включено | 0,025 0,06 |
Значения коэффициентов мощности, характеризующих степень дросселирования двигателя на различных режимах его работы,
приведены в табл. 3.7.
Таблица 3.7
| Степень дросселирования | Чрезвычайный режим | Номинальный режим | Крейсерский режим |
 = =
|  = 1,07…1,1 = 1,07…1,1
|  = 0,9 = 0,9
|  = 0,76…0,81 = 0,76…0,81
|
3.5.1. Мощность для висения вертолета
на статическом потолке
|
|
|
Удельная приведенная мощность, потребная для висения
вертолета на статическом потолке [64, 90]:
 Вт/Н, (3.30)
Вт/Н, (3.30)
где  ‑ относительный КПД НВ (на режиме висения » 0,75);
‑ относительный КПД НВ (на режиме висения » 0,75);  ‑ относительная плотность воздуха на статическом потолке;
‑ относительная плотность воздуха на статическом потолке;  ‑ относительная величина полной тяги несущего винта, уравновешивающая силу веса вертолета G0 и аэродинамические сопротивления: фюзеляжа
‑ относительная величина полной тяги несущего винта, уравновешивающая силу веса вертолета G0 и аэродинамические сопротивления: фюзеляжа  , горизонтального оперения (стабилизатора)
, горизонтального оперения (стабилизатора)  и крыла
и крыла  , которые находятся в потоке от НВ:
, которые находятся в потоке от НВ:
 , (3.31)
, (3.31)

где  ,
,  ,
,  ‑ относительные величины проекции фюзеляжа, горизонтального оперения и крыла на горизонтальную плоскость, соответственно (принимаются по статистическим данным или по результатам замеров 3D-моделей предварительных компоновок вертолета):
‑ относительные величины проекции фюзеляжа, горизонтального оперения и крыла на горизонтальную плоскость, соответственно (принимаются по статистическим данным или по результатам замеров 3D-моделей предварительных компоновок вертолета):  ;
;
 ‑ относительный размах крыла,
‑ относительный размах крыла,  .
.
Для легких вертолетов одновинтовой схемы ≈ 0,003…0,007.
При предварительном и эскизном проектировании одновинтового вертолета можно принять  [88].
[88].
3.5.2. Мощность для горизонтального полета
вертолета на
В предварительных расчетах энерговооруженности вертолета используется приближенный метод, в соответствии с которым
удельная приведенная мощность, потребная для горизонтального полета вертолета (в том числе и на ), может быть определена
по формуле [64, 72, 90]
| (3.32) |
где  ‑ коэффициент индукции несущего винта;
‑ коэффициент индукции несущего винта;  – суммарное
– суммарное
относительное лобовое сопротивление (3.26) ненесущих элементов
конструкции вертолета (фюзеляжа, оперения, шасси и т.п.).
Величины коэффициентов индукции  в зависимости от
в зависимости от
скорости горизонтального полета одновинтового вертолета можно определить по формуле [85]

| (3.33) |
Контрольные значения коэффициента индукции , определенные по (3.33) в зависимости от скорости полета, даны в табл. 3.8.
Таблица 3.8
| , км/ч
| ||||||
|
| 1,09 | 1,1 | 1,12 | 1,18 | 1,28 | 1,38 |
3.5.3. Мощность для полета вертолета
на динамическом потолке
Удельную приведенную мощность, Вт/Н, потребную для полета вертолета на динамическом потолке, определяют по данным работ [64, 72, 90]:
|
|
|
| (3.34) |
где ‑ экономическая скорость полета на динамическом потолке:
 ; (3.35)
; (3.35)
 ‑ относительная плотность воздуха на динамическом потолке.
‑ относительная плотность воздуха на динамическом потолке.
Известно, что продолжительный взлет и полет на динамическом потолке вертолет выполняет на экономических скоростях  .
.
Причем разница в скоростях незначительная и объясняется изменением соотношения между индуктивной мощностью и суммой
профильной мощности и мощности движения.
3.5.4. Мощность для продолжения взлета вертолета
при отказе одного двигателя
Удельная приведенная мощность, потребная для продолжения
взлета вертолета при отказе одного двигателя [64, 72, 90]:
| (3.36) |
где  ‑ экономическая скорость полета у земли:
‑ экономическая скорость полета у земли:
 ; (3.37)
; (3.37)
 ‑ число двигателей (при двух ГТД силовой установки [90]).
‑ число двигателей (при двух ГТД силовой установки [90]).
Выражения (3.30), (3.32), (3.34), (3.36) позволяют исследовать влияние нагрузки на  и
и  в области принятого диапазона изменения параметра
в области принятого диапазона изменения параметра  . Результаты расчетов
. Результаты расчетов  ,
,  ,
,  ,
,  сводят в таблицу.
сводят в таблицу.
3.5.5. Анализ энерговооруженности вертолета
Анализ результатов расчетов показывает, что в зависимости от назначения вертолета, заданных его ЛТХ и др., возможны различные варианты относительного расположения графиков функций  ,
,  ,
,  и (рис. 3.10).
и (рис. 3.10).
Требование обеспечения надежной эксплуатации вертолета на всех характерных режимах полета соответствует границам заштрихованных областей (рис. 3.10). При выборе параметров и характеристик проектируемого легкого вертолета используют функцию  ‑ для нахождения расчетного значения
‑ для нахождения расчетного значения  :
:
 .
.
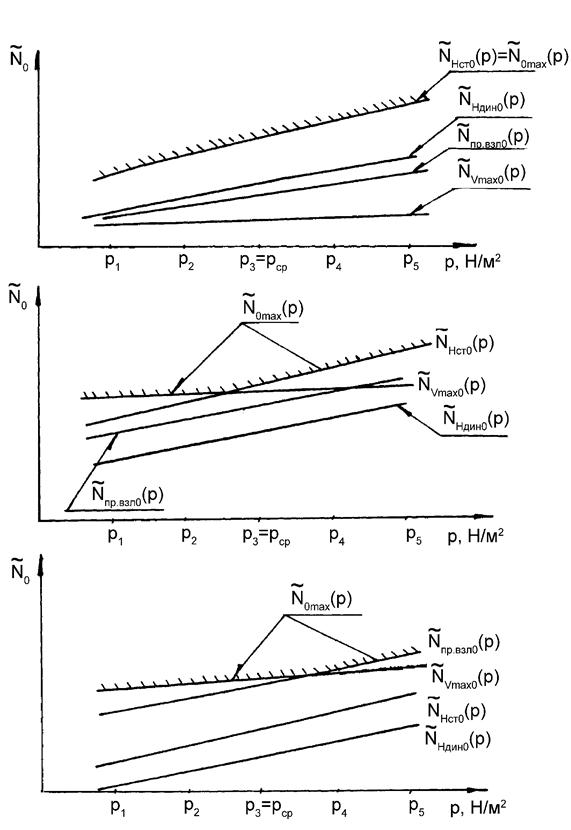
Рис. 3.10. Характер зависимостей
, , и
3.6. Относительная масса конструкции планера
Относительная масса конструкции планера вертолета (3.3):
 , (3.38)
, (3.38)
где  ‑ относительные массы фюзеляжа
‑ относительные массы фюзеляжа
(с капотами и хвостовой балкой), крыла, оперения, шасси и системы управления вертолета, соответственно.
3.6.1. Относительная масса фюзеляжа
Относительную массу фюзеляжа легкого вертолета можно
рассчитать по формуле [3.39]
 , (3.39)
, (3.39)
где  ‒ коэффициент массы фюзеляжа, ≈1,7 кг0,75/м1,76 (табл. 3.9);
‒ коэффициент массы фюзеляжа, ≈1,7 кг0,75/м1,76 (табл. 3.9);  ‒ взлетная масса первого, второго и т.д. приближений;
‒ взлетная масса первого, второго и т.д. приближений;
 — площадь омываемой (наружной) поверхности фюзеляжа.
— площадь омываемой (наружной) поверхности фюзеляжа.
Величину принимают, учитывая статистические данные [82] (табл. 3.9), или вычисляют по одной из приближенных формул:
 ; (3.40)
; (3.40)
 , (3.41)
, (3.41)
где  ,
,  ‑ площади проекций фюзеляжа в плане и при виде сбоку;
‑ площади проекций фюзеляжа в плане и при виде сбоку;  ‑ площадь миделевого сечения фюзеляжа;
‑ площадь миделевого сечения фюзеляжа;  ‑ длина
‑ длина
фюзеляжа. Первая формула дает более точный результат.
Достаточно точную оценку величины можно получить по способу 1), согласно которому фюзеляж без надстроек разбивают на
несколько отсеков: носовой, центральный, хвостовой и хвостовая балка. В этом случае носовой и хвостовой отсеки заменяют полу-эллипсоидами, конусами или промежуточными фигурами, примыкающими к центральному отсеку. Центральную часть представляют
в виде цилиндра эквивалентного диаметра, величину которого определяют из условия равенства периметров миделевого и эквивалентного сечений; хвостовую балку ‑ в виде усеченного конуса.
..............................
1) Следует принимать во внимание, что наиболее перспективным является определение омываемой поверхности фюзеляжа вертолета по результатам
3D-моделирования общего вида (облика) вертолета и его частей в компьютерных системах: типа КОМПАС, SolidWorks, UNIGRAPHICS, CATIA и т.п.
Таблица 3.9
| Вертолет | Масса фюзе-ляжа
 , кг , кг
| Нормальная взлетная масса , кг
| Относительная масса фюзеляжа 
| Наружная поверхность фюзеляжа , м2
| К-нт массы фюзеляжа, кг0,75/м1,76
|
| Ми-1 | 0,138 | 2,29 | |||
| Ми-2 | 0,125 | 2,22 | |||
| Ми-34 | |||||
| R-22 | 0,1079 | 9,6 | 1,84 | ||
| Брэнтли В-2В | 0,108 | 1,44 | |||
| Брэнтли м.305 | 0,108 | 24,9 | 1,39 | ||
| Во-105А | 0,108 | 24,2 | 1,78 | ||
| МВВ Во-105LS | 0,108 | 25,4 | 2,15 | ||
| Хиллер FH-1100, RH-1100 | 0,108 | 24,2 | 1,37 | ||
| Хиллер RH-1100 | 0,108 | 24,2 | 1,44 | ||
| Хьюз 369 | 0,108 | 21,7 | 1,36 | ||
| ОН-6А Кэйюз 500 | 0,108 | 21,7 | 1,42 | ||
| Хьюз 500 Д/Е | 0,108 | 21,7 | 1,61 | ||
| Хьюз 500 МД | 0,108 | 21,7 | 1,61 | ||
| Хьюз 530 F | 0,108 | 22,4 | 1,61 | ||
| Энстром F-28А | 0,108 | 20,5 | 1,32 | ||
| Энстром F-28F/280Шарк | 0,108 | 20,5 | 1,41 | ||
| SA-3160, Алуэтт III | 0,108 | 1,6 | |||
| SA-316B | 0,108 | 1,79 | |||
| SA-316C | 0,108 | 1,82 | |||
| SA-330C, Пума | 0,108 | 69,3 | 1,85 | ||
| SA-341G, Газель | 0,108 | 21,4 | 2,01 | ||
| SA-342L | 0,108 | 21,4 | 2,18 | ||
| AS-350В,Экюрей | 0,108 | 33,4 | 1,56 | ||
| Примечание. Для указанных в табл. 3.9 легких вертолетов приведены расчетные значения и
|
Такое внимание к величине площади фюзеляжа вертолета объясняется существенным влиянием величины на другие его характеристики.
3.6.2. Относительная масса оперения
Массу оперения (вертикального (ВО), горизонтального (ГО))
вертолета приближенно можно определить (см. (2.3)) по формуле
 , (3.42)
, (3.42)
где  – удельная масса (средняя масса 1 м2) оперения, кг/м2;
– удельная масса (средняя масса 1 м2) оперения, кг/м2;
 – площадь оперения (ВО и/или ГО), м2.
– площадь оперения (ВО и/или ГО), м2.
Поскольку удельная масса оперения вертолета по статистичес-ким данным имеет довольно большой разброс ( = 5,6 ... 12,4 кг/м2) *, а площадь оперения на начальных этапах проектирования еще не определена, на практике можно использовать эмпирическую зависимость массы оперения от взлетной массы вертолета:
= 5,6 ... 12,4 кг/м2) *, а площадь оперения на начальных этапах проектирования еще не определена, на практике можно использовать эмпирическую зависимость массы оперения от взлетной массы вертолета:
 , (3.43)
, (3.43)
 ‒ относительная масса оперения:
‒ относительная масса оперения:  ≈ 0,001…0,002 для стабилизатора,
≈ 0,001…0,002 для стабилизатора,  ≈ 0,002…0,004 для киля легкого вертолета.
≈ 0,002…0,004 для киля легкого вертолета.
Относительную массу стабилизатора легкого вертолета в зависимости от удельной нагрузки на НВ также определяют по формуле
 , (3.44)
, (3.44)
где  – коэффициент массы ГО, = 70…131,4 Н /м2;
– коэффициент массы ГО, = 70…131,4 Н /м2;
 (где
(где  ), на этапе предварительного и эскизного проектирования легкого вертолета можно принять ≈ 0,004.
), на этапе предварительного и эскизного проектирования легкого вертолета можно принять ≈ 0,004.
Площадь ВО на вертолетах одновинтовой схемы составляет (0,6...1,5) % ометаемой площади НВ. На вертолетах, у которых
вместо обычного рулевого винта установлен многолопастный винт в канале – «фенестрон», площадь вертикального оперения увеличена до 2,5...3,5 % ометаемой площади НВ.
....................................
* ‒ У легких вертолетов Ми-34 и АК1-3 ‒  и
и  кг/м2, соответственно.
кг/м2, соответственно.
3.6.3. Относительная масса шасси
 , (3.45)
, (3.45)
где  ‑ коэффициент относительной массы шасси: для полозкового шасси = 0,012…0,027; для неубирающегося колесного шасси
‑ коэффициент относительной массы шасси: для полозкового шасси = 0,012…0,027; для неубирающегося колесного шасси
= 0,02…0,028; для убирающегося шасси ≈ 0,03…0,035
(бóльшие значения для вертолетов категории Е-1-Л1).
Масса хвостовой опоры одновинтового вертолета обычно не превосходит 0,1 % взлетной массы вертолета.
Известные статистические данные по зарубежным вертолетам дают несколько отличающиеся значения коэффициента массы (рис. 3.11) [96].
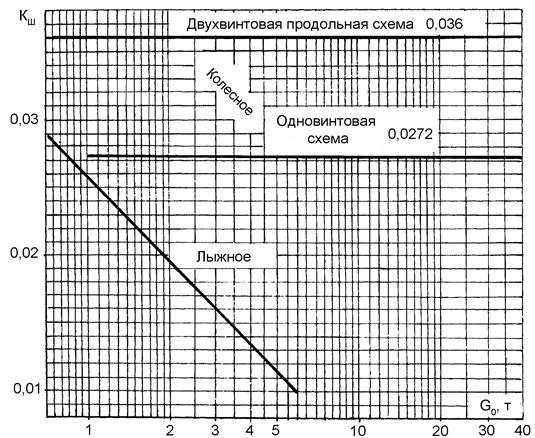
Рис. 3.11. Зависимость коэффициента массы шасси kш |
3.6.4. Относительная масса управления
При оценке массы системы управления вертолетом ее условно разделяют на две части: ручную (проводка управления от командных рычагов до бустеров) и бустерную (автомат перекоса, бустеры с их креплением, проводка управления от бустеров до автомата
перекоса, основная гидросистема). Относительную массу системы управления в общем виде определяют по формуле [92]
 , (3.46)
, (3.46)
где  ‑ относительные массы ручного (2.2) и бустерного управления вертолетом:
‑ относительные массы ручного (2.2) и бустерного управления вертолетом:
 , (3.47)
, (3.47)
где  ‑ коэффициент массы ручного управления: = 7…10,5 кг/м ‑ для вертолетов транспортной категории, не имеющих вспомогательной системы управления; = 18…25 кг/м ‑ для вертолетов, имеющих вспомогательное управление для открытия грузовых створок, трапов, капотов, выпуска шасси и др.:
‑ коэффициент массы ручного управления: = 7…10,5 кг/м ‑ для вертолетов транспортной категории, не имеющих вспомогательной системы управления; = 18…25 кг/м ‑ для вертолетов, имеющих вспомогательное управление для открытия грузовых створок, трапов, капотов, выпуска шасси и др.:
 , (3.48)
, (3.48)
здесь  ‑ коэффициент относительной массы системы бустерного управления, ≈ 129,5 (кг/(м2·с2));
‑ коэффициент относительной массы системы бустерного управления, ≈ 129,5 (кг/(м2·с2));  ‑ удлинение лопасти НВ
‑ удлинение лопасти НВ
(для лопастей отечественных вертолетов = 17,5…20,5; для лопастей ряда зарубежных вертолетов = 12,4…20,3).
Легкие вертолеты весьма часто не оснащаются гидравлической системой управления. В этом случае масса всех элементов системы управления будет зависеть от величины шарнирных моментов лопастей, размеров и схемы вертолета, количества командных рычагов, типа проводки и автомата-перекоса. Определение массы управления сводится к расчету массы ручного управления, достигнутый уровень коэффициента массы которого подтверждается статистикой:
 ≈ 7,3…8,2 кг/м.
≈ 7,3…8,2 кг/м.
Масса элементов проводки управления зависит от ее длины,
изменяется пропорционально радиусу лопасти для легкого вертолета одновинтовой схемы. Так как длины всех проводок, кроме проводки
к РВ, невелики, то можно ограничиться простой (типовой) механической системой управления.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 4751; Нарушение авторских прав?; Мы поможем в написании вашей работы!