КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Метод регулирования
|
|
|
|
Сущность метода регулирования заключается в том, что требуемая точность замыкающего звена РЦ достигается изменением величины одного из составляющих звеньев без съёма с него материала. Теоретически метод аналогичен пригонке, отличается лишь техника изменения величины компенсирующего звена, которая осуществляется двумя путями:
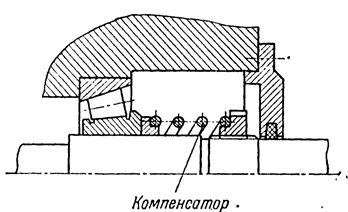
1. Дискретно – введением в конструкцию специальной детали требуемого размера или с требуемыми относительными поворотами её поверхностей. В этом случае говорят о методе регулирования с неподвижным компенсатором (рис. 5.20).
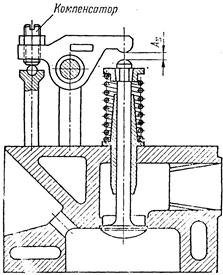
2. Непрерывно – изменением положения одной из деталей путём её линейного перемещения или поворота, или того и другого одновременно. В этом случае говорят о методе регулирования с подвижным компенсатором (рис. 5.21).
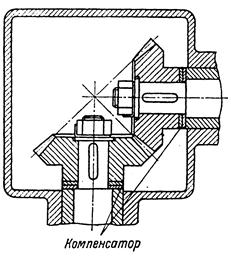
| Совмещение начальных конусов шестерён обеспечивается прокладками. |
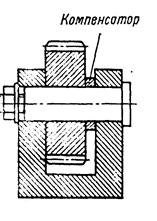
| Требуемый зазор обеспечивается подбором компенсирующей шайбы |
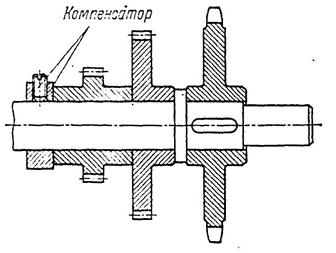 
| Требуемые зазоры достигаются установкой детали, закреплённой стопорным винтом. |
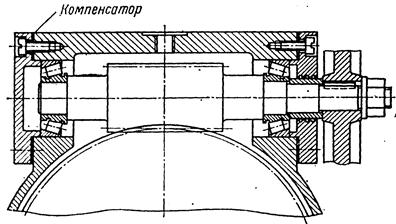
| Регулирование осевой игры подшипников осуществляется прокладками |
Рис. 5.20. Примеры использования в конструкциях дискретного регулирования.
| Осевое перемещение подшипника достигается сжатием пружины. |
| Требуемый зазор достигается перемещением винта |
| Осевой зазор достигается завинчиванием гайки |
| Регулирование осевой игры подшипников достигается за счёт перемещения резьбовых деталей. |
| Рис. 5.21. Примеры использования в конструкциях непрерывного регулирования. |
В качестве неподвижных компенсаторов обычно применяют наборы (комплекты) деталей (сменных колец, втулок, шайб и т.д.), подбираемых при сборке или наборы прокладок одинаковой (или разной) толщины.
|
|
|
Набор сменных деталей состоит из несколько групп (ступеней), количество которых определяется требуемой величиной компенсации δК и допуском исходного звена ТА0. Число ступеней (групп) неподвижных компенсаторов определяется по формуле:
 (5.20)
(5.20)
Смысл определения числа ступеней компенсаторов проиллюстрируем на следующей схеме (рис. 5.22).
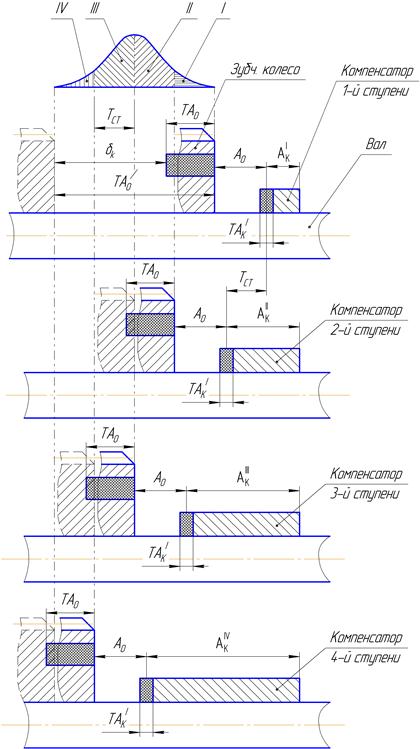
Рис. 5.22. Схема определения числа ступеней регулирования неподвижным компенсатором.
Разность между размерами компенсаторов соседних ступеней или шаг ступеней определяется как отношение:
 (5.21)
(5.21)
Поскольку каждое составляющее звено, в том числе и звено – компенсатор, при изготовлении имеет рассеяние размера по определённому закону (Гаусса, равной вероятности, треугольнику), то количество неподвижных компенсаторов в каждой ступени можно определить площадью, ограниченной кривой рассеяния, осью абсцисс и вертикальными границами ступеней компенсации (см. рис. 5.22). Количество таких площадей равно N -1. Если же о характере рассеяния размеров ничего не известно, то количество компенсаторов в каждой ступени делается одинаковым.
Размеры ступеней звена – компенсатора определяются по следующей формуле:
 (5.22)
(5.22)
В качестве подвижных компенсаторов предусматривают специальный механизм регулирования с использованием резьбовых соединений, гидравлической силы и др. Чтобы иметь возможность путём перемещения подвижного компенсатора устранять погрешности, порождаемые износом и другими причинами, необходимо в величину координаты середины поля допуска компенсирующего звена, дополнительно к поправке  , вносить ещё поправку
, вносить ещё поправку  , которая должна алгебраически суммироваться с поправкой . В последнее время, всё чаще, для компенсации износа или растяжения ремней (например, ГРМ) применяют автоматическую регулировку.
, которая должна алгебраически суммироваться с поправкой . В последнее время, всё чаще, для компенсации износа или растяжения ремней (например, ГРМ) применяют автоматическую регулировку.
Расчёт величины компенсации методом регулирования подвижным компенсатором осуществляется по методу пригонки, только без съёма материала.
|
|
|
Из изложенного видно, что метод регулирования имеет следующие основные преимущества:
1. Возможность достижения любой степени требуемой точности замыкающего звена при экономичных допусках на все составляющие звенья
2. Отсутствие каких бы то ни было пригоночных работ или работ связанных с подбором деталей, благодаря чему снижается время на сборку.
3. Сообщает механизмам и машинам новое свойство – возможность периодически или, что более важно, непрерывно и автоматически сохранять требуемую точность замыкающего звена.
Недостатком метода регулирования является увеличение количества деталей в машине за счёт введения в конструкцию набора компенсаторов или специального регулирующего устройства. Регулирование неподвижными компенсаторами может быть оправдано лишь в серийном и массовом производстве, поскольку есть уверенность, что в конце-концов, каждый изготовленный впрок неподвижный компенсатор найдет применение в одном из изделий, чего может и не произойти в единичном и мелкосерийном производствах. При регулировании же подвижным компенсатором нет принципиальных ограничений технического характера и может быть применён в любом производстве. Целесообразность применения ограничена только экономическими соображениями, т.к. введение в конструкцию регулирующего устройства связано с усложнением, а следовательно, и с удорожанием конструкции. Оправдать такое удорожание можно только существенной экономией на трудоёмкости сборочных работ, а это обычно достигается при серийном, и массовом производствах.
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 1958; Нарушение авторских прав?; Мы поможем в написании вашей работы!