КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методы акустического контроля
|
|
|
|
Физические основы акустического контроля
Акустический контроль
Порядок применения МНК
Типовой порядок внедрения и применения МНК включает в себя следующие основные этапы:
1. Конструкторско-технологический анализ изделия.
1.1. Определение технологических операций, при которых возможно образование дефектов.
1.2. Определение типа дефектов, подлежащих выявлению.
1.3. Определение зон контроля (наиболее опасных участков изделия).
1.4. Назначение условий контроля.
1.5. Разработка технических условий на отбраковку изделий (разработка критериев или норм браковки).
2. Предварительный выбор возможных методов и средств НК.
3. Проектирование и изготовление настроечных образцов.
4. Определение чувствительности, разрешающей способности и достоверности предварительно выбранных методов и средств НК.
5. Окончательный выбор методов и средств НК с учетом факторов, влияющих на этот выбор.
6. Разработка способов регистрации, расшифровки и документирования результатов НК.
7. Разработка НТД на НК изделия.
Акустический контроль основан на организации взаимодействия упругих волн с объектом контроля, регистрации и расшифровке результатов этого взаимодействия. Акустическими (упругими) волнами называют распространяющиеся в среде упругие колебания (механические деформации). При распространении упругих волн частицы среды не переносятся, а лишь совершают колебания относительно точек равновесия с амплитудой А и средней колебательной скоростью u. Длина волны l, скорость С ее распространения, частота f и период колебаний Т связаны между собой следующей зависимостью:
l = (С / f) = C · T. (4.1)
В зависимости от частоты упругие колебания подразделяют на инфразвуковые (частота f < 20 Гц), звуковые (f = 20¸2·104 Гц), ультразвуковые (f = 2·104 ¸109 Гц) и гиперзвуковые (f >109 Гц). Для целей НК используются звуковой и ультразвуковой диапазоны частот (табл. 4.1).
|
|
|
Т а б л и ц а 4.1
| Признак метода | Метод акустического контроля |
| 1. Принцип (способ) выявления дефектов | 1.1. Эхо-импульсный 1.2. Теневой 1.3. Импедансный 1.4. Велосимметрический 1.5. Резонансный (вынужденных колебаний) 1.6. Спектральный (свободных колебаний) 1.7. Эмиссионный 1.8. Комбинированный |
| 2. Частотный диапазон | 2.1. Звуковой 2.2. Ультразвуковой |
| 3. Характер взаимодействия упругой волны с объектом контроля | 3.1. Прошедшего излучения 3.2. Отраженного излучения 3.3. Собственного излучения |
| 4. Регистрируемый информативный параметр | 4.1. Амплитудный 4.2. Частотный 4.3. Фазовый 4.4. Временной 4.5. Механического импеданса 4.6. Спектрального состава |
В зависимости от направления колебаний частиц по отношению к направлению распространения волны различают продольные, сдвиговые (поперечные), поверхностные и нормальные волны. Если направление колебаний частиц в контролируемом объекте совпадает с направлением распространения волны, то волна называется продольной. Такая волна может быть возбуждена в твердом теле, жидкой и газообразной среде. Если направление колебаний частиц перпендикулярно направлению волны, волна называется сдвиговой.
На свободной поверхности твердого тела можно возбудить поверхностные волны (волны Рэлея), частицы в которых движутся по эллипсам. Амплитуда колебаний частиц по мере удаления от свободной поверхности убывает по экспоненте, поэтому волна локализована в тонком подповерхностном слое толщиной около 1,0 ¸ 1,5 l. В плоских телах и телах постоянной толщины (листах, проволоках) можно возбудить нормальные волны (волны Лэмба), которые распространяются по волноводному механизму.
|
|
|
Одной из характеристик акустических свойств материалов является волновое сопротивление z (иначе – удельное акустическое сопротивление), равное произведению скорости продольных волн С п на плотность r материала:
z = r · С п. (4.2)
Скорость упругих волн зависит от их вида, упругих постоянных материала и размеров тела, в котором волна распространяется (табл. 4.2).
Т а б л и ц а 4.2
Формулы для определения упругих постоянных материалов
и скорости распространения упругих волн
| Параметр | Формула |
| Скорость С ппродольных волн в тонких стержнях | С п = (Е /r)1/2 (4.3) |
| Скорость С п продольных волн в неограниченной среде | С п ={[ Е (1 - n)] / [ r (1 + n) (1 - 2 n)]}1/2» » (Е /r)1/2 (4.4) |
| Скорость С с сдвиговых волн в неограниченной среде | С с = (G /r)1/2» 0,55 С п (4.5) |
| Скорость С пов поверхностных волн в неограниченной среде | С пов= [(0,87 + 1,12 n)/(1 + n)]· (G/r)1/2 » » 0,93 С с (4.6) |
| Скорость С н нормальных симметричных волн в пластине толщиной d << l | С н» (p· d / l) · { E / [3 r · (1 - n 2)]}1/2 (4.7) |
| То же для асимметричных (изгибных) волн | С н» { E / [ r · (1 - n 2)]}1/2 (4.8) |
| Модуль упругости Е при растяжении-сжатии | Е = С п2· r ·[(1 + n)·(1 - 2 n) / (1 - n)]» » С п2· r (4.9) |
| Модуль сдвига G | G = С с2 · r (4.10) |
| Коэффициент Пуассона n | n = (E / 2 G) – 1 (4.11) |
В табл. 4.3 приведены акустические характеристики некоторых материалов (объектов контроля), воды (наиболее распространенной акустической жидкости для смачивания поверхности объекта контроля) и воздуха (среды несплошностей).
Т а б л и ц а 4.3
Акустические характеристики некоторых материалов и веществ
| Материал (вещество) | Модуль упругости Е ·109, Па | Плотность r, кг/м3 | Коэффициент Пуассона n | Скорость упругих волн, м/с | Волновое сопротивление z ·106, Па·с/м | |
| Продольных С п | Сдвиговых С с | |||||
| Сталь углеродистая | 0,28 | 45,6 | ||||
| Алюминий | 0,34 | 16,9 | ||||
| Титан | 0,33 | 27,0 | ||||
| Латунь | 0,35 | 35,9 | ||||
| Стеклотекстолит КАСТ-В | 0,08 0,08 | - - | 7,54 6,82 | |||
| Вдоль основы Вдоль утка | 0,08 0,08 | - - | 7,54 6,82 | |||
| Оргстекло | 2,7 | 0,20 | 3,15 | |||
| Вода | - | - | - | 1,45 | ||
| Воздух | - | 1,29 | - | - | 0,43·10-3 |
|
|
|
Для возбуждения и приема упругих колебаний обычно используют пьезоэлектрические материалы, представляющие собой дисковидную пластину (рис. 4.1, а), изготовленную, как правило, из пьезокерамического материала - титаната бария. На поверхности таких пластин наносят тонкие слои серебра, служащие электродами, и поляризуют их в постоянном электрическом поле. При приложении к электродам переменного электрического напряжения U, источником которого является генератор электрических колебаний (рис. 4.1, а), пьезопластина (пьезоэлемент) начинает вынужденно деформироваться (растягиваться и сжиматься) с частотой f электрического напряжения (обратный пьезоэффект).
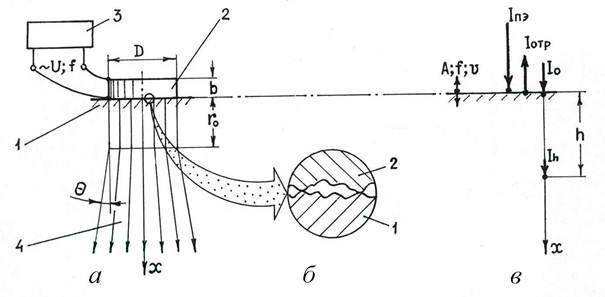 |
Рис. 4.1. Схемы волнового поля излучателя (а), межконтактного зазора (б) и акустического тракта (в): 1 – контролируемое изделие; 2 - пьеэоэлемент; 3 – генератор электрических колебаний; 4 – волновое поле (другие пояснения – в тексте)
При воздействии же на пъезоэлемент упругих механических колебаний на его электродах возникает переменное электрическое напряжение с частотой воздействующих на нее механических колебаний (прямой пьезоэффект).
Амплитуда А колебаний пьезоэлемента зависит от напряжения U на электродах и соотношения частот переменного напряжения и свободных (собственных) колебаний пьезоэлемента. Наибольшая амплитуда колебаний пьезоэлемента будет при резонансе, когда частота f возбуждающего переменного напряжения совпадает с собственной частотой f пэ колебаний пьезоэлемента, которая зависит следующим образом от его толщины b и скорости С пэ упругих волн в пьезоматериале:
f пэ = С пэ / 2 b, (4.12)
откуда толщина пьезоэлемента, который должен деформироваться в резонансе с частотой f вынужденных колебаний, находится как:
b = С пэ / 2 f. (4.13)
Пьезопластины являются основным элементом преобразователей (иначе – искательных головок, искателей) электрических колебаний в упругие и наоборот. В первом случае такие преобразователи называют также излучателями, во втором – приемниками. Современные дефектоскопы комплектуются набором различных преобразователей, из которых наиболее широко применяются два типа – нормальный и наклонный (рис. 4.2).
|
|
|
Нормальный ( иначе - прямой ) преобразователь (рис. 4.2, а) предназначен для возбуждения в контролируемой детали 8 продольных волн. Донышко 1 из пластмассы, металлокерамики или металла защищает нижнюю поверхность пьезоэлемента 2, который приклеен к демпферу 3, изготовленному из звукогасящего материала – текстолита. Его назначение – гашение собственных колебаний пьезоэлемента. Серебряные электроды на обеих сторонах пьезоэлемента соединены проводниками 6 и 7 через штырьковый разъем с дефектоскопом. Все элементы преобразователя размещены в металлическом корпусе 4 и зафиксированы заливочным отверждающимся компаундом 5. На крышке преобразователя указана собственная частота колебаний пьезоэлемента.
Наклонный преобразователь (рис. 4.2, б) предназначен для ввода упругих волн под некоторым углом к поверхности детали с целью создания в ней сдвиговых или поверхностных волн. Пьезоэлемент 2, приклеенный к призме 9 из органического стекла, излучает в нее продольную волну С п1, а на границе призмы с деталью происходит преломление продольной волны и ее расщепление (трансформация) на продольную С п2 и сдвиговую С с2. Чтобы получить в детали только сдвиговые волны, угол падения a (рис. 4.2,б) выбирают в промежутке между первым (a кр1) и вторым (a кр2) критическими углами. При значениях a > a кр2в детали возникают поверхностные волны.
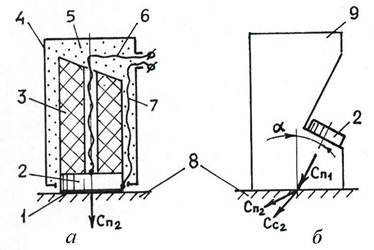 |
Рис. 4.2. Нормальный (а) и наклонный (б) преобразователи: 1 – защитное донышко; 2 - пьезоэлемент; 3 - демпфер; 4 – металлический корпус; 5 – заливочный отвержденный компаунд; 6,7 – соединительные провода; 8 – контролируемая деталь; 9 - призма
Распространение высокочастотных упругих волн происходит по аналогии с законами геометрической оптики. Если материал детали однороден и изотропен, то пьезоэлемент нормального преобразователя создает волновое поле, которое вблизи поверхности ввода имеет цилиндрическую форму (ближняя зона), а на некотором расстоянии r 0 – форму усеченного конуса с углом 2 Q при вершине (дальняя зона) (рис. 4.1, а). Протяженность ближней зоны равна:
r 0= D 2 / 4 l, (4.14)
где D – диаметр пъезоэлемента.
Половина угла раствора конуса пучка упругих волн, в котором почти полностью концентрируется генерируемая излучателем энергия, характеризует направленность излучения и определяется из соотношения:
sin Q = 1,22 l / D = 1,22 С п / (D · f), (4.15)
где С п – скорость продольных волн в контролируемом материале.
Чем больше диаметр излучателя и частота упругих волн, тем выше направленность пучка лучей. При D < l от излучателя распространяются сферические волны, при D > l - излучаемая энергия концентрируется преимущественно вдоль нормали к излучающей поверхности.
Законы прохождения и отражения ультразвуковых волн аналогичны законам геометрической оптики. Если ультразвуковая волна, создаваемая, например, пьезоэлементом и обладающая интенсивностью I пэ, падает по нормали к плоской границе раздела двух сред с различным акустическим сопротивлением, то часть ее энергии с интенсивностью I 0 переходит во вторую среду, а часть, интенсивностью I отр, отражается (рис. 4.1, в), причем и проходящая, и отраженная волна будут того же вида, что и падающая. Под интенсивностью упругих колебаний понимается энергия, переносимая упругой волной в единицу времени сквозь единицу площади поверхности, перпендикулярной к направлению волны.
Интенсивность упругих колебаний пьезоэлемента рассчитывается следующим образом:
I пэ = 2 p2 · A 2 · f 2 · z пэ, (4.16)
где z пэ – волновое сопротивление материала пъезоэлемента.
Коэффициент отражения К отр на границе раздела двух сред, представляющий собой отношение отраженной энергии к вводимой, равен:
К отр = I отр / I пэ = (I пэ – I 0) / I пэ = [(z 1– z 2) / (z 1 + z 2)]2, (4.17)
где z 1и z 2– волновые сопротивления первой (например, пьезоэлемент) и второй (например, контролируемая деталь) сред соответственно.
Из выражения (4.17) видно, что доля отраженной энергии тем больше, чем больше разность волновых сопротивлений двух сред. Если волновое сопротивление газа условно принять за единицу, то с помощью данных, приведенных в табл. 4.3, можно приблизительно подсчитать соотношения волновых сопротивлений сред, имеющих различные агрегатные состояния:
газ жидкость твердое тело
z = 1: 3500: 7000 ¸ 100000
Явление отражения упругой волны на границе «твердое тело – воздух», используемое, например, для обнаружения несплошностей в теневом и эхо-импульсном методах акустического контроля, приходится преодолевать при вводе и приеме упругих волн. Так, если между пьезоэлементом и поверхностью контролируемой детали имеется воздушный зазор (рис. 4.1, б), как это всегда и бывает при контакте шероховатых поверхностей, то от него отразится в пъезоэлемент практически вся энергия упругих ультразвуковых колебаний, так как волновые сопротивления этих сред значительно отличаются друг от друга (табл. 4.3). Чтобы обеспечить акустический контакт, этот воздушный зазор необходимо устранить, для чего на поверхность проверяемой детали обычно наносят тонкий слой жидкости – воды, минерального масла, глицерина или др., которые гораздо более близки по волновым сопротивлениям к твердым телам (табл. 4.3), чем газы. Но даже и в этом случае в контролируемую деталь удается ввести лишь 10–12 % энергии, излучаемой пьезоэлементом.
Ввод и прием упругих ультразвуковых волн осуществляется четырьмя основными способами.
Контактный способ через слой жидкости предусматривает наличие между преобразователем и контролируемой деталью слоя жидкости.
Струйный способ осуществляется путем непрерывной подачи акустической жидкости в межконтактный зазор и применяется для ввода упругих колебаний в стенные и потолочные поверхности контролируемого изделия.
Иммерсионный способ заключается в полном погружении контролируемой детали в ванну, заполненную водой. Акустическая связь между преобразователями и объектом контроля осуществляется через значительный слой жидкости.
Контактный способ через эластичную прокладку, изготовленную, например, из полиуретана, позволяет избежать трудностей, связанных с нанесением и последующим удалением акустических жидкостей, но характеризуется более высокими значениями коэффициента отражения.
По мере удаления от излучателя происходит затухание интенсивности I упругой волны и амплитуды А колебаний частиц.
Во-первых, это явление обусловлено геометрическим расширением фронта волны (рис. 4.1, а).
Второй причиной затухания является поглощение (иначе – диссипация) материалом механической энергии упругих колебаний, которое заключается в ее необратимом переходе в тепловую энергию.
Наконец, третьей причиной затухания может быть рассеяние упругой волны в результате ее отражения под различными углами от многочисленных границ между зернами металлов или от межфазных поверхностей в ПКМ.
Затухание упругих волн происходит по экспоненциальному закону, и на глубине h в детали (рис. 4.1, в) амплитуда и интенсивность колебаний составляют следующие значения:
А = А 0 · exp (- d · h); I = I 0 · exp (- 2 d · h), (4.18)
где d - коэффициент затухания, А 0и I 0– соответственно амплитуда и интенсивность упругих колебаний при h = 0.
Если известны значения A 1и A 2на расстояних h 1и h 2от излучателя, то коэффициент затухания рассчитывается следующим образом:
d = [1 / (h 2 - h 1)] · ln (A 1 / A 2), (4.19)
откуда вытекает его физический смысл как величины, обратной расстоянию, на котором амплитуда упругих колебаний уменьшается в e раз, поскольку ln (A 1/ A 2) = 1 при (A 1 / A 2) = е.
Значение коэффициента затухания, как, впрочем, и многих других феноменологических характеристик материалов, определяется не только типом материала (например, при прочих равных условиях упругие волны в полимерных материалах затухают гораздо интенсивнее, чем в металлах), но зависит также и от характера внешнего воздействия на материал. Так, значение d, как правило, заметно возрастает с увеличением частоты f упругих колебаний:
d = m · f n (4.20)
где m – эмпирическая константа, n - показатель степени, который в зависимости от типа материала может иметь различные значения (n = 1 ¸ 4).
Это влияние частоты на затухание упругих волн ограничивает возможности ультразвукового контроля толстостенных деталей. Так, из совместного анализа выражений (4.16) – (4.18) и (4.20) вытекает, что частота f оказывает неоднозначное влияние на интенсивность I h упругих колебаний на глубине h:
I h = 2 p2 · z пэ· (1 – K отр) · A 2 · f 2 · exp (- 2 m · h · f n). (4.21)
Тогда, продифференцировав выражение (4.21) по частоте f и приравняв полученную частную производную нулю, найдем, что каждой глубине h в контролируемой детали (или ее толщине) соответствует некая оптимальная частота f опт, при которой интенсивность колебаний на этой глубине будет максимальной:
f опт = [1 / (m · n · h)]1/ n. (4.22)
Из выражения (4.22) видно, что поиск глубинных дефектов в толстостенных изделиях или контроль их толщины целесообразней проводить при меньших значениях частоты, а для тонкостенных деталей – применять более высокие частоты.
Ультразвуковой контроль деталей из металлов проводят в типичном для них диапазоне рабочих частот f = 0,5 ¸ 10 МГц, из неметаллических материалов – в диапазоне f = 0,1 ¸ 2 МГц.
При распространении упругих волн могут наблюдаться интерференционные и дифракционные явления.
Интерференция – результат сложения двух или нескольких когерентных колебаний, воздействующих на одну и ту же точку среды. Это явление значительно усложняет контроль, особенно в режиме непрерывного излучения. С этой точки зрения более предпочтительным является импульсный метод, при котором падающая и отраженная (от дефекта или противоположной поверхности детали) волны не встречаются и не интерферируют.
Дифракция – огибание упругими волнами малых препятствий, в частности – дефектов. Упругая волна, если можно так выразиться, «не замечает» дефекта, размер а которого меньше длины волны l. Тогда условие обнаружения дефекта будет выглядеть следующим образом:
а > l = С / f (4.23)
или, в несколько преобразованном виде:
f > С / а. (4.24)
Таким образом, получается, что выявление дефектов малых размеров требует применения более высоких частот ультразвуковых колебаний, что, с другой стороны, затрудняет контроль толстостенных деталей.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 1031; Нарушение авторских прав?; Мы поможем в написании вашей работы!