КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основні теоретичні відомості. Прилади та обладнання, що використовуються в роботі
|
|
|
|
Прилади та обладнання, що використовуються в роботі
ВИВЧЕННЯ РОБОТИ ТА ПРИНЦИПУ ДІЇ МАГНІТОІНДУКЦІЙНИХ ТАХОМЕТРІВ
Лабораторна робота № 2
Контрольні запитання
Звіт з лабораторної роботи
Звіт з лабораторної роботи повинен містити:
1.5.1. Тему, мету і порядок виконання роботи.
1.5.2. Результати виконання завдань, проілюстровані ескізом деталі, результатами розрахунків та описом ходу виконання роботи.
1.5.3. Оформлені висновки з лабораторної роботи.
1.6.1 Які вимірювання називають лінійними?
1.6.2 Який метод називають методом ноніуса чи збігу? Поясніть суть даного методу.
1.6.3 Які інструменти відносять до штангенінструментів?
1.6.4 Які типи штангенциркулів ви знаєте?
1.6.5 Як визначають похибку штангенциркуля?
1.6.6 Опишіть порядок виконання вимірювань штангенциркулем.
1.6.7 Опишіть принцип дії та призначення профілографа, профілометру.
Мета роботи: Вивчити будову і принцип дії магнітоіндукційних тахометрів та провести їх повірку.
Тривалість роботи: 2 аудиторні години.
2.1.1 Тахометр зразковий ІСТ-2.
2.1.2 Тахометри робочі ІТЗ-1 та ІРТ-2.
2.1.3 Стенд для повірки тахометрів.
Тахометр — прилад для вимірювань кутової швидкості обертання вала в одиницю часу.
Швидкість обертання елементів машин, пристроїв та агрегатів є однією з характеристик досліджуваного об'єкта. Нерідко вона визначає динамічні та теплові напруження в машинах. Технічні тахометри повинні забезпечувати похибку вимірювання звичайно не більше ніж 1,5...2 %, а при вимірюванні швидкості обертання в енергетичних установках ця похибка не повинна перевищувати 0,3...0,5 %.
Швидкість обертання визначають за кількістю обертів за хвилину n (об/хв), що зв'язана з частотою обертання  , як
, як
|
|
|
 n = 60 . (2.1)
n = 60 . (2.1)
Найпоширенішими є такі методи вимірювання частоти обертання:
- відцентрові механічні, в яких чутливий елемент реагує на відцентрову силу;
- вимірювання частоти обертання, що розвивається не зрівноваженими масами рухомого вала;
- електричні постійного, змінного чи імпульсного струму, основані на залежності генерованої напруги від частоти обертання, а для змінного та імпульсного струму - залежність частоти струму від частоти обертання;
- магнітоіндукційні, основані на залежності наведених в металевому тілі вихрових струмів від частоти обертання;
- індукційні, основані на законі електромагнітної індукції;
- фотоелектричні, що базуються на модуляції світлового потоку елементами обертання;
- стробоскопічні та інші.
 Прикладом відцентрового механічного тахометра може бути тахометр, зображений на рис. 2.1.
Прикладом відцентрового механічного тахометра може бути тахометр, зображений на рис. 2.1.
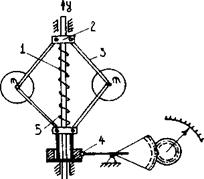
Рисунок 2.1 - Відцентровий механічний тахометр
У даному тахометрі до осі 1, яка обертається з частотою w досліджуваного об'єкта (вала), закріплена муфта 2, що з'єднана з рамкою 3. На шарнірах у місцях з'єднань відповідних кінців сторін рамки закріплені інерційні маси m. Під дією відцентрових сил інерційні маси розходяться, переміщуючи вздовж осі у муфту 4 і стискуючи пружину 5. Переміщення муфти 4 передається на відліковий пристрій.
Залежність Dу відхилення муфти 4 від початкового положення у (при wх=0) є функцією параметрів тахоперетворювача і, за своїм значенням, пропорційне квадрату вимірюваної кутової швидкості
y=Sw2x ,(2.1)
де S - чутливість тахометра, яка визначається його конструкційними параметрами.
Відцентрові тахометри прості та надійні. Вони застосовуються для вимірювань кутових швидкостей включно до 1000 об/хв, їх основними недоліками є недистанційність, порівняно велика похибка (до 10 %), низький поріг чутливості.
Первинними перетворювачами електричних (генераторних) тахометрів є тахогенератори – електричні мікромашини, що працюють в режимі генератора і є перетворювачами швидкості обертання ротора в пропорційний електричний сигнал.
|
|
|
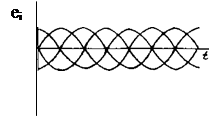
Тахогенератор постійного струму (рис. 2.2 а) має рухомий ротор 1 з розміщеною на ньому багатосекційною вимірювальною обмоткою 2, кінці яких підведені до колектора 3 зі щітками 4. При обертанні ротора в полі, створюваному постійним магнітом, у вимірювальній обмотці наводиться синусоїдна ЕРС (рис. 2.2 б), значення якої пропорційне магнітній індукції в повітряному зазорі, що є синусною функцією кута повороту ротора, та вимірюваній кількості обертів. Випрямлена за допомогою колектора напруга подається на магнітоелектричний вимірювальний прилад.
 |
а) б)
Рисунок 2.2 - Тахогенератор постійного струму
Тахогенератори постійного струму використовуються для вимірювання швидкості обертання з похибкою до 1...1,5 %. Їх основним недоліком є високий рівень шумів, викликаний наявністю рухомого контакту в ланці колектор - щітка, а також пульсації вихідної напруги.
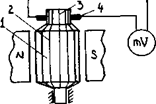
Серед індукційних тахометрів особливе місце займають імпульсні індукційні тахометри. Первинний перетворювач такого тахометра (рис. 2.3) має вимірювальну обмотку 1, розміщену на сталевому ярмі 2, через яке замикається магнітний потік постійного магніту 3. Рухомою частиною є феромагнітний зубчастий диск 4, який кріпиться до вала, оберти котрого вимірюють.
При обертанні вала зубчастий виступ 5 диска (індуктора), проходячи біля розімкненої частини ярма, зменшує повітряний проміжок між рухомою та нерухомою частинами магнітопроводу, зменшуючи магнітний опір кола магнітного потоку від постійного магніту, що призводить до зміни магнітного потоку і наведення у вимірювальній обмотці ЕРС
 , (2.1)
, (2.1)
де FM - магніторушійна сила постійного магніту; RM - магнітний опір магнітного кола.
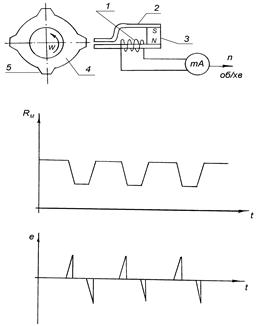
Рисунок 2.3 - Індукційний тахометр
Для наведеної на рис. 2.3 конструкції імпульсного індукційного перетворювача ЕРС, що виникає у вимірювальній обмотці, буде мати вигляд двополярних імпульсів, частота яких дорівнюватиме частоті проходження виступів диска (зубців) попри розімкнену частину ярма, тобто частоті обертання вала
|
|
|
 , (2.2)
, (2.2)
де р - кількість виступів індуктора; п - частота його обертання, об/хв.
Крім частотного інформативного параметра, інформативним параметром вихідного сигналу може бути і вихідна ЕРС.
З певним наближенням можна вважати, що амплітуда вихідних імпульсів
 (2.3)
(2.3)
де  – зміна магнітного опору за рахунок зміни довжини повітряного проміжку;
– зміна магнітного опору за рахунок зміни довжини повітряного проміжку;  – сталий коефіцієнт.
– сталий коефіцієнт.
Для наближеної оцінки еm можна вважати, що
 , (2.4)
, (2.4)
де Dd = h – зміна довжини повітряного проміжку між індуктором та ярмом при обертанні індуктора, яка дорівнює висоті зубця h; m0 – магнітна проникність повітря; S – площа поперечного перерізу зубця.
У свою чергу,

 (2.5)
(2.5)
де v, RCP - лінійна швидкість переміщення та середній радіус зубців індуктора,  - кількість обертів індуктора за секунду; а – кут нахилу зубців.
- кількість обертів індуктора за секунду; а – кут нахилу зубців.
Підставивши значення DRM та Dt у вираз для еm і враховуючи незалежність конструктивних та технологічних параметрів перетворювача від значення вимірюваної величини, запишемо
 , (2.6)
, (2.6)
де S – крутизна АЧХ перетворювача.
Похибки індукційних тахометрів з частотним виходом визначаються лише похибкою вимірювання частоти. В індукційних тахометрах з вихідним параметром у вигляді сигналу інтенсивності ЕРС пропорційна до швидкості переміщення котушки лише за умови, що індукція В постійна впродовж всього шляху переміщення. Непостійність індукції викликає виникнення похибки. Похибка таких тахометрів також багато в чому залежить від струму, який споживає вторинний перетворювач. Проходячи вимірювальною обмоткою індукційного перетворювача, цей струм створює магнітне поле, яке згідно з правилом Ленца спрямоване назустріч до напрямку основного поля і має розмагнічувальну дію. Внаслідок цього сумарна індукція зменшується, зменшується і ЕРС перетворювача.
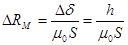
Магнітоіндукційний тахометр складається з алюмінієвої чашки, яка обертається в магнітному полі ізольованого чавунного статора (рис. 2.4). У статорі під кутом 90° одна до іншої розташовані дві пари котушок індуктивності. Під дією електромагнітного поля однієї пари котушок статора в обертаючій алюмінієвій чаші індукуються вихрові струми, що створюють власне магнітне поле, завдяки якому з'являється ЕРС в іншій парі котушок статора. Значення цієї ЕРС пропорційне частоті обертання і може бути виміряне вольтметром, шкала якого відградуйована в одиницях частоти обертання.
|
|
|
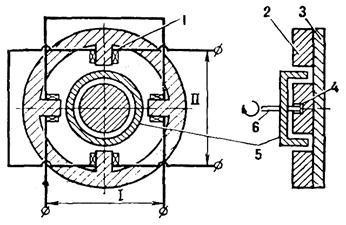
Рисунок 2.4 - Магнітоіндукційний тахометр: 1 - котушка індуктивності; 2 - статор; 3 - ізоляція; 4 - підшипник; 5 - алюмінієва чашка; 6 - вал приводу; I - напруга живлення змінного струму; II - напруга на виході.
Принцип дії магнітоіндукційних тахометрів заснований на явищі наведення вихрових струмів в металевому тілі, яке обертається в магнітному полі (або в нерухомому тілі, яке знаходиться в обертовому магнітному полі). Момент взаємодії вихрових струмів з магнітним полем, яке їх зумовило, служить мірою частоти обертання.
Магнітоіндукційні тахометри виготовляють двох типів: із шкалами, проградуйованими в об/хв типу ТЗ та з процентними шкалами типу ІТЗ.
Рисунок 2.5 - Схема магнітного тахометра
Принцип дії магнітоіндукційного тахометра такий. Про тягом обертання ведучого валика 11 через кутовий редуктор 9,10 обертається і магнітний вузол 8, що складається з двох жорстко з’єднаних між собою плат, на яких знаходяться постійні магніти 6. Обертаюче магнітне поле, що створює магнітний вузол 8, індукує в чутливому елементі (струмопровідному диску 7) вихрові струми. Внаслідок взаємодії обертаючого магнітного поля з індукційними струмами виникає крутний момент, що намагається повернути чутливий елемент у напрямку обертання магнітного вузла. Крутному моменту чутливого елемента 7 протидіє момент спіральної пружини 5. Через те, що момент чутливого елемента пропорційний частоті обертання магнітного вузла, а момент спіральної пружини пропорційний куту її закрутки, то кут повороту чутливого елемента пропорційний частоті обертання магнітного вузла і, отже, частоті обертання ведучого вала. Завдяки цьому шкала 2 тахометра виходить рівномірною.Вказівну стрілку 1 кріплять до осі чутливого елемента. Для зменшення амплітуди коливання стрілки і полегшення відліку показів, рухому стрілку тахометра демпфіровано. Магнітоіндуційний демпфер складається з рухомого струмопровідного (алюмінієвого) диску 3 і нерухомої магнітної системи з постійними магнітами 4. При обертанні рухомої системи магнітний потік магнітів 4 наводить у диску 3 вихрові струми, що взаємодіють з магнітним потоком, і створюють момент, що гальмує рухому систему. Якщо диск 3 нерухомий, то гальмівний момент дорівнює нулю.
Згідно паспортів, похибки показів тахометра не повинні перевищувати:
- для зразкового ІСТ-2 ±0,3 % - в діапазоні від 60 до 100 %;
- ±0,5 % - в діапазоні від 0 до 60 % шкали;
- для приладу,що повіряється ІТЗ-1 ±2 % - в діапазоні від 60 до 100 %;
- ±3 % - в діапазоні від 0 до 60 %;
- 100 % шкали приладу ІРТ-2 відповідає 2500 обертам за хвилину.
2.3 Підготовка установки до роботи і проведення вимірювань
2.3.1 Згідно методичних вказівок ознайомитись з будовою та принципом дії магнітоіндукційного тахометра та порядком проведення його повірки. Повірку тахометрів проводять шляхом зняття показів зразкового приладу та приладу, який потрібно повірити, і їх порівняння. Повірка приладу складається з зовнішнього огляду та визначення похибки вимірювання.
2.3.2 Перевірити готовність лабораторної установки до роботи згідно з рис. 2.6.
 | |||
Рисунок 2.6 - Схема лабораторної установки: БЖ – блок живлення; М – двигун постійного струму; СП – синхронний перетворювач (датчик); ВВЗ – вимірювальний вузол (зразковий тахометр); ВВП – вимірювальний вузол тахометр), який повіряється
|
|
|
|
|
Дата добавления: 2014-12-24; Просмотров: 882; Нарушение авторских прав?; Мы поможем в написании вашей работы!