КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Двигатель постоянного тока
|
|
|
|
Генератор постоянного тока.
Рассмотрим сначала работу электродвигателя в режиме генератора.
Предположим, что якорь электродвигателя (рис. 1-1 и 1-2, а) приводится во вращение по часовой стрелке. Тогда в проводниках обмотки якоря индуктируется Э. Д. С., направление которой может быть определено по "правилу правой руки" и показано на рис. 1-1 и 1-2, а. Поскольку поток полюсов предполагается неизменным, то эта Э. Д. С. индуктируется только вследствие вращения якоря и называется Э. Д. С. вращения. В обоих проводниках вследствие симметрии индуктируются одинаковые Э. Д. С., которые по контуру витка складываются. Частота Э. Д. С. f в двухполюсном электродвигателе равна скорости вращения якоря n, выраженной в оборотах в секунду:
f = n,
а в общем случае, когда машина имеет р пар полюсов с чередующейся полярностью:
f = pn
Таким образом, в генераторе коллектор является механическим выпрямителем, который преобразовывает переменный ток обмотки якоря в постоянный ток во внешней цепи.
Рассматриваемая простейшая машина может работать также двигателем, если к обмотке ее якоря подвести постоянный ток от внешнего источника. При этом на проводники обмотки якоря будут действовать электромагнитные силы и возникнет электромагнитный момент. Величины силы и момента определяются как и для генератора. При достаточной величине Мэм якорь электродвигателя придет во вращение и будет развивать механическую мощность. Момент Мэм при этом является движущим и действует в направлении вращения.
Если мы желаем, чтобы при той же полярности полюсов направления вращения генератора (рис. 1-2, а) и двигателя (рис. 1-2, б) были одинаковы, то направление действия а следовательно, и направление тока у двигателя должны быть обратными по сравнению с генератором (рис. 1-2, б).
В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в переменный ток в обмотке якоря и работает, таким образом, в качестве механического инвертора тока.
Принцип обратимости. Из изложенного выше следует, что каждый электродвигателя постоянного тока может работать как в режиме генератора, так и в режиме двигателя. Такое свойство присуще всем типам вращающихся электрических машин и называется обратимостью.
Для перехода машины постоянного ток а из режима генератора в режим двигателя и обратно, при неизменной полярности полюсов и щеток и при неизменном направлении вращения требуется только изменение направления тока в обмотке якоря.
Поэтому такой переход может осуществляться весьма просто и в определенных условиях даже автоматически.
Аналогичным образом может происходить изменение режима работы также в электродвигателях переменного тока.
-ЭДС двигателя постоянного тока
Среднее значение ЭДС проводника е пр,ср при его перемещении в пределах полюсного деления можно определить через среднее значение магнитной индукции (см. рис. 9,2 б):
е пр,ср = B cp lv.
Если обмотка якоря имеет N проводников и 2 а параллельных ветвей, то число последовательно соединенных проводников в каждой параллельной ветви будет N /2 a. Тогда среднее значение ЭДС машины
(9,4)
| Е = B cp lv | N | . |
| 2 а |
Среднее значение магнитной индукции
(9,5)
| B cp = | Ф | . |
| π D я l /2 p |
где Ф — магнитный поток одного полюса, Вб; D я — диаметр якоря, м; 2 р — число полюсов машины.
Величина π D я l /2 p в (9.5) представляет собой поверхность сердечника якоря, приходящуюся на один полюс.Линейную скорость проводников v можно определить по формуле
(9,6)
| v = | π D я n | . |
где n — частота вращения якоря, об/мин.
После замены в (9.4) магнитной индукции В ср и скорости v согласно (9.5) и (9.6) получим
(9.7)
| Е= | p | * | N | *Ф n = kе Ф n, | |||||
| а | |||||||||
| где kе = | p | * | N | - коэффициент ЭДС, зависящий от конструк тивных особенностей машины. | |||||
| а | |||||||||
Как видно, ЭДС прямо пропорциональна произведению магнитного потока на частоту вращения
Регулирование скорости вращения
| Регулирование скорости двигателей постоянного тока |
Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря. Схема включения двигателя для этого случая представлена на рис. 1, а электромеханические и механические характеристики — на рис. 2, а.
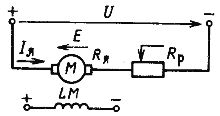 Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения
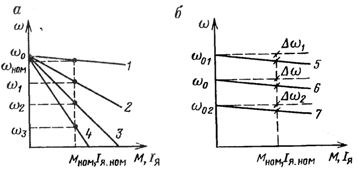 Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен (D= 2 - З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 - 4.
Механические характеристики для различных значений потока двигателя приведены на рис. 2, а и 2, б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен (D= 2 - З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
Учитывая большие потери в реостате при малых скоростях, данный способ регулирования скорости применяется для приводов с кратковременным и повторно-кратковременным режимами работы.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
При увеличении скорости ослаблением потока допустимый момент двигателя постоянного тока изменяется по закону гиперболы, а мощность остается постоянной. Диапазон регулирования скорости для данного способа D = 2 - 4.
Механические характеристики для различных значений потока двигателя приведены на рис. 2, а и 2, б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Данный способ регулирования используют в приводах в качестве вспомогательного, обеспечивающего повышение скорости при холостом ходе механизма.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя.
Если источник энергии обеспечивает возможность непрерывного изменения подводимого к двигателю напряжения, то регулирование скорости двигателя будет плавным.
Данный способ регулирования является экономичным, так-так регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря. По всем перечисленным выше показателям данный способ регулирования по сравнению с первым и вторым наилучший.
|
Режим противовключения
Режим противовключения. Режим противовключения представляет собой режим, в котором якорь двигателя под действием внешнего момента либо запаса кинетической энергии вращается в направлении, противоположном тому, в котором он должен был бы вращаться при данной схеме его включения в двигательном режиме (или вхолостую).
Режим противовключения удобно пояснить на примере грузоподъемного механизма, где этот режим может быть использован для опускания с постоянной скоростью грузов. Предположим, что с помощью двигателя параллельного, последовательного или смешанного возбуждения, включенного по схеме рис. 9.22 и работающего в двигательном режиме с моментом М = М с и частотой вращения n, поднимается груз (рис. 9.33). Момент М обусловлен силой тяжести груза, трение в передаче не учитывается.
Если при работе двигателя с частотой вращения n в цепь якоря включить реостат r с достаточно большим сопротивлением (см. рис. 9.22), то двигатель перейдет на искусственную характеристику и в первое мгновение будет развивать момент M 1. Поскольку М 1 < М c, частота вращения начнет уменьшаться, что будет сопровождаться увеличением момента двигателя. Как видно, при n = 0 М 2 < М с. Поэтому после остановки двигатель под действием момента М с, вызванного силой тяжести груза, начнет вращаться в противоположную сторону (n < 0), а груз будет опускаться.
Так как Е = kе Ф n, то изменение направления вращения приводит к изменению направления ЭДС якоря и следует считать Е < 0. Как видно из формулы (9.19),
| I я = | U - E | = | U + |E| | >0; |
| r я + r | r я + r |
при Е < 0 ток не изменяет своего направления (I я > 0), вследствие чего не изменяет направления и момент двигателя (М > 0), поскольку М = kM Ф I я.
Так как при n < 0 момент направлен против частоты вращения и якорь вращается в направлении, противоположном двигательному режиму, электродвигатель работает в тормозном режиме противовключения.
С увеличением | n| в режиме противовключения возрастает | Е|, что приводит к увеличению тока и момента двигателя. Механические (см. рис. 9.33) и электромеханические характеристики двигателя в режиме противовключения подчиняются уравнениям (9.23) и (9.24), являются продолжением характеристик двигательного режима и располагаются в IV квадранте. Установившийся режим наступает при частоте вращения n 1, при которой М = М c.
Изменяя значение сопротивления реостата r, можно получить различные скорости опускания груза. Однако, как видно, характеристики при работе в режиме противовключения получаются слишком «мягкими», вследствие чего частота вращения в сильной степени зависит от нагрузки.
|
| К использованию режима противовключения для уменьшения времени торможения двигателя |
Так как в режиме противовключения ток и ЭДС якоря совпадают по направлению (I я > 0, а Е < 0, рис. 9.22), то двигатель работает по существу в качестве генератора и преобразует потенциальную энергию опускающегося груза в электрическую энергию, которая равна | ЕI я = t|. Последняя в свою очередь преобразуется в теплоту в сопротивлениях r я и r цепи якоря. В этих же сопротивлениях расходуется энергия UI я t, потребляемая цепью якоря из сети.
Реакция якоря
При работе генераторов и двигателей без нагрузки (вхолостую) ток в обмотке якоря отсутствует (или весьма мал) и магнитное поле машины возбуждается только МДС обмотки возбуждения (рис 9.8, а). Поле оказывается симметричным относительно оси главных полюсов. В секциях обмотки якоря, находящихся на геометрической нейтрали ГН и замыкаемых щетками накоротко, ЭДС не индуктируется.
Следует обратить внимание на то, что в данном параграфе проводники обмотки якоря расположены условно не в пазах магнитопровода якоря, как это делают на самом деле, а на поверхности якоря; кроме того, условно не показан коллектор, и щетки касаются непосредственно проводников обмотки якоря.
При работе машины с нагрузкой в обмотке якоря возникает ток и магнитное поле машины возбуждается как МДС обмотки возбуждения, так и МДС обмотки якоря.
|
| Рис. 9.8. К пояснению явления реакции якоря |
|
| Рис. 9.9. К устройству компенсационной обмотки |
Воздействие МДС обмотки якоря на магнитное поле машины называется реакцией якоря.
Рассмотрим реакцию якоря в наиболее часто встречающемся случае расположения щеток на геометрической нейтрали.
На рис. 9.8, б показано магнитное поле, образованное под действием МДС обмотки якоря, а на рис. 9.8, в — результирующее магнитное поле машины. Указанные на рис. 9.8, в направления токов обмотки якоря соответствуют указанным там же направлениям вращения генератора и двигателя. В случае расположения щеток на геометрической нейтрали возникает поперечная реакция якоря, характеризуемая тем, что ось симметрии поля реакции якоря (рис. 9.8, б) перпендикулярна оси главных полюсов. В результате действия поперечной реакции якоря магнитное поле машины оказывается несимметричным относительно оси главных полюсов (рис. 9.8, в). Под одним краем каждого полюса магнитная индукция увеличивается, под другим уменьшается. Физическая нейтраль ФН, под которой понимают линию, проходящую через ось машины и точки поверхности якоря, где магнитная индукция результирующего поля равна нулю, смещается у генератора по направлению вращения, у двигателей — против направления вращения. При отсутствии тока якоря физическая нейтраль совпадает с геометрической (рис. 9.8, а). В результате действия реакции якоря в секциях обмотки якоря, расположенных на геометрической нейтрали, возникает ЭДС. Между коллекторными пластинами, присоединенными к секциям, находящимся в усиленном магнитном поле главных полюсов, появляется повышенное напряжение, что может привести к возникновению дуги между коллекторными пластинами. Для устранения искажения магнитного поля под полюсами крупные машины, работающие с частыми и значительными перегрузками, снабжаются компенсационной обмоткой. Последнюю закладывают в пазы полюсных наконечников (рис. 9.9) и соединяют последовательно с обмоткой якоря, в результате чего создается магнитное поле в зоне расположения полюсов, противоположное по направлению полю реакции якоря.
Влияние поперечной реакции якоря на результирующее магнитное поле зависит от степени насыщения ферромагнитного материала магнитной цепи и значения тока якоря. В общем случае из-за насыщения ферромагнитного материала магнитная индукция под одним краем полюса возрастает меньше, чем уменьшается под другим; в результате магнитный поток машины несколько уменьшается. Однако при нагрузках, на которые рассчитываются машины при нормальных условиях их работы, магнитный поток изменяется на относительно небольшое значение, поэтому влияние поперечной реакции якоря на магнитное поле при расчетах часто не учитывают.
Электромагнитный момент
Электромагнитный момент. На якорь, по обмотке которого проходит ток Ia, действует электромагнитный момент
(8.5)
М = 0,5Fрез Da,
где F рез — результирующая электромагнитная сила, возникаю-щая при взаимодействии тока с магнитным полем.
Сила F рез представляет собой сумму усилий fx , приложенных ко всем активным проводникам обмотки якоря. При достаточно большом числе коллекторных пластин силу F рез можно считать постоянной:
(8.6)
| N | ||
| Fрез = | ∑ | fx = Nfср = NBсрla ia = NBср la ia /(2a). |
Здесь i a — ток в одной параллельной ветви (см. рис. 10.11). C учетом значений В срэлектромагнитный момент
(8.7)
| М = pNФIa /(2πa) = смФIa, |
где см = pN/(2πa) = 60се /(2π) — коэффициент, зависящий от конструктивных параметров машины. При работе машины в двигательном режиме электромагнитный момент является вращающим, а в генераторном режиме — тормозным.
Характеристики двигателя постоянного с параллельным возбуждением
Механическая характеристика-зависимость скорости вращения от момента, а скоростная – зависимость скорости вращения от тока. Известно,что (первые два уравнения- режим холостого хода, вторые два – под нагрузкой)
Выражая через ток,получаю, что

Т.к. механическая и скоростная характеристики являются прямыми линиями, их графики можно построить по двум точкам.
Одна из точек берётся из паспорта машины- это Номинальный ток (в случае скоростной характеристики) или момент(в случае механической характеристики), отложенные по оси абсцисс, по оси ординат откладывается номинальная частота вращения. Вторую точку можно получить из режима холостого хода. При этом режиме отсутствует нагрузка, а значит, момент(ток) равен нулю, а частота вращения определяется как 
Механическая характеристика. Скоростная выглядит аналогично
Вопрос 3. Асинхронная машина
Устройство и принцип работы:
Асинхронный двигатель состоит из неподвижной части статора 1 (рис. 248, а), на котором расположены обмотка 2 статора, и вращающейся части — ротора 3 с обмоткой 4. Между ротором и статором имеется воздушный зазор, который для улучшения магнитной связи между обмотками делают по возможности малым. Обмотка 2 статора представляет собой трехфазную или в общем случае многофазную обмотку, катушки которой размещают равномерно вдоль окружности статора. Фазы этой обмотки А-Х, B-Y и C-Z размещены равномерно по окружности статора; они соединяются «звездой» (рис. 248,б) или «треугольником» и подключаются к сети трехфазного тока. Обмотку 4 размещают равно-
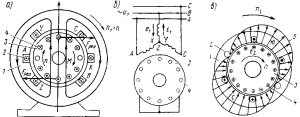 Рис. 248. Электромагнитная схема асинхронного двигателя (а), схема включения его обмоток (б) и пространственное распределение вращающего магнитного поля (в) в двухполюсной машине
Рис. 248. Электромагнитная схема асинхронного двигателя (а), схема включения его обмоток (б) и пространственное распределение вращающего магнитного поля (в) в двухполюсной машине
мерно вдоль окружности ротора. При работе двигателя она замкнута накоротко.
При подключении обмотки статора к сети создается синусоидально распределенное вращающееся магнитное поле 5 (рис. 248, в). Оно индуцирует в обмотках статора и ротора э. д. с. e1 и е2. Под действием э. д.с. е2 по проводникам ротора будет проходить электрический ток i2. На рис. 248, а показано согласно правилу правой руки направление э. д. с. е2, индуцированной в проводниках ротора при вращении магнитного потока Ф, по часовой стрелке (при этом проводники ротора перемещаются относительно потока Ф против часовой стрелки). Если ротор неподвижен или частота его вращения п меньше синхронной частоты n1, активная составляющая тока ротора совпадает по фазе с индуцированной э. д. с. е2, при этом условные обозначения (крестики и точки) показывают одновременно и направление активной составляющей тока i2.
На проводники с током, расположенные в магнитном поле, действуют электромагнитные силы, направление которых определяется правилом левой руки. Суммарная сила Fрез, приложенная ко всем проводникам ротора, образует электромагнитный момент М, увлекающий ротор за вращающимся магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение и его установившаяся частота вращения соответствует равенству электромагнитного момента М тормозному, приложенному к валу от приводимого во вращение механизма и внутренних сил трения.
Э.д.с, индуцированная в проводниках обмотки ротора, зависит от частоты их пересечения вращающимся полем, т. е. от разности частот вращения магнитного поля n1 и ротора n. Чем больше разность n1— n, тем больше э. д. с. е2. Следовательно, необходимым условием для возникновения в асинхронной машине электромагнитного вращающего момента является неравенство частот вращения n1и n. Только при этом условии в обмотке ротора индуцируется э. д. с. и возникает ток i и электромагнитный момент М. По этой причине машина называется асинхронной (ротор ее вращается несинхронно с полем). Иногда ее называют индукционной ввиду того, что ток в роторе возникает индуктивным путем, а не подается от какого-либо внешнего источника.
Для характеристики отставания частоты вращения ротора двигателя от частоты вращения магнитного поля служит скольжение, его выражают в относительных единицах или процентах:
s = (n1— n) /n1 или s = [(n1— n) /n1] 100%
Условия возникновения вращающегося магнитного поля
Круговым вращающимся магнитным полем называется поле, вектор магнитной индукции которого, не изменяясь по модулю, вращается в пространстве с постоянной угловой частотой.
Для создания кругового вращающегося поля необходимо выполнение двух условий:
- Оси катушек должны быть сдвинуты в пространстве друг относительно друга на определенный угол (для двухфазной системы – на 900, для трехфазной – на 1200).
- Токи, питающие катушки, должны быть сдвинуты по фазе соответственно пространственному смещению катушек.
Режим холостого хода на примере машины с фазным ротором
Теперь представим себе, что обмотка ротора разомкнута, а обмотка статора включена в сеть. Ток по роторной обмотке при этом не проходит и двигатель подобен трансформатору, но уже в режиме холостого хода. Так как ток в проводниках ротора отсутствует, то механическая сила не возникает и ротор остается неподвижным.
По обмотке статора при этом проходит ток (ток холостого хода I 0), который создает намагничивающую силу, необходимую для появления магнитного потока Фмакс. Поскольку в магнитной цепи асинхронного двигателя имеется воздушный зазор, то для создания магнитного потока требуется относительно больший ток, чем в трансформаторе. В двигателях большой и средней мощности ток холостого хода составляет 25—35% номинального тока, а в двигателях малой мощности 35—60%.
Наводимая в неподвижном роторе э. д. с. может быть определена по формуле (13), если учесть, что скольжение в этом режиме равно 1.
//Пояснение на счет определения ЭДС
Выражение для частоты э. д. с. в роторе дает возможность легко определить и саму э.д.с. Е2, наводимую в роторе, В:
(12)
Е 2 = 4,44 f 2 ω 2 k 02Фмакс,
где ω2 - число витков одной фазы, последовательно соединенных между собой; k02 — обмоточный коэффициент обмотки ротора; Фмакс — наибольшее значение основного магнитного потока, пронизывающего контур обмотки статора, Вб. Если подставить в (12) выражение для f2, можно найти связь между э. д. с. ротора и скольжением, В:
(13)
E 2 = 4,44 fsω 2 k 02Фмакс = E 20 s,
где E20 — э. д. с., наводимая в неподвижном роторе потоком Фмакс ,. Пояснение окончено //
Отношение э. д. с. в обмотке статора к э. д. с. в обмотке ротора называется коэффициентом трансформации э. д. с. и может быть определено по формуле
(21)
| ke = | E1 | = | ω1 k01 | ; |
| E20 | ω2 k02 |
Мощность, потребляемая двигателем в режиме холостого хода при неподвижном роторе, расходуется на потери в проводниках статора двигателя, потери на перемагничивание и вихревые токи в стали статора и в стали ротора.
Режим короткого замыкания асинхронного двигателя с фазным ротором
Для определения параметров двигателя часто делают опыт короткого замыкания. Этот опыт заключается в том, что к заторможенному двигателю подводят пониженное напряжение, добиваясь, чтобы ток двигателя был равен номинальному току. Напряжение, подводимое к двигателю в опыте короткого замыкания, оказывается очень малым по сравнению с номинальным (обычно не более 10%). Используя этот опыт, можно в условиях, безопасных для двигателя, приближенно определить величину тока короткого замыкания I к при нормальном напряжении, А:
(17)
| Iк = Iн | Uн | , |
| Uк |
где Uн — номинальное напряжение, В; Uк — напряжение в опыте короткого замыкания, В; Iн — номинальный ток, А.
Замеряя в этом опыте по ваттметру мощность Рк, подводимую к одной фазе двигателя, находят также cos φ в режиме короткого замыкания
(18)
| cos φк = | Pк | , |
| UкIк |
и эквивалентное активное сопротивление статора и ротора двигателя rк в режиме короткого замыкания на одну фазу, Ом:
(19)
| rк = | Pк | , |
| Iн2 |
Это эквивалентное активное сопротивление равно сумме активного сопротивления статора и приведенного активного сопротивления ротора. Понятие о приведенном активном и реактивном сопротивлении ротора будет дано ниже.
Определив угол φк по величине cos φк из формулы (18), легко найти и эквивалентное реактивное сопротивление двигателя в режиме короткого замыкания, Ом:
(20)
x к = r к tg φк.
Индуктивное сопротивление x к равно сумме индуктивного сопротивления статора и приведенного индуктивного сопротивления ротора.
Поскольку частота вращения ротора двигателя в этом режиме равна нулю, его механическая мощность также равна нулю. Потери в стали во время опыта короткого замыкания очень малы, поскольку мал вращающийся магнитный поток. Поэтому мощность Р к, которая подводится к машине, почти вся идет на нагрев проводников обмотки статора и ротора. То же самое можно сказать о режиме короткого замыкания при полном напряжении.
Основные уравнения асинхронного двигателя
Напряжение U1, приложенное к фазе обмотки статора, уравновешивается основной ЭДС E1, ЭДС рассеяния и падением напряжения на активном сопротивлении обмотки статора:
 В роторной обмотке аналогичное уравнение будет иметь вид:
В роторной обмотке аналогичное уравнение будет иметь вид:
 Но так как роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:
Но так как роторная обмотка замкнута, то напряжение U2=0, и если учесть еще, что E2s=SE2 и x2s=Sx2 , то уравнение можно переписать в виде:
 Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
Уравнение токов асинхронного двигателя повторяет аналогичное уравнение трансформатора:
 где
где

|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 2648; Нарушение авторских прав?; Мы поможем в написании вашей работы!