КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Компенсаторы реактивной мощности на встречновключенных тиристорах
|
|
|
|
Известно устройство для компенсации реактивной мощности выпрямительно-инверторного преобразователя электроподвижного состава [1], которое компенсирует реактивную мощность, потребляемую нагрузкой от источника питания. Компенсация осуществляется за счет подключения к вторичной обмотке трансформатора электровоза индуктивно-емкостного LC-компенсатора с фиксированными параметрами индуктивности и емкости.
Устройство содержит тяговый трансформатор, нагрузку, LC-компенсатор, ключевой элемент, устройство формирования импульсов управления ключевым элементом. LC-компенсатор через ключевой элемент подключен параллельно нагрузке и вторичной обмотке тягового трансформатора напряжения, первичная обмотка которого связана с питающей сетью. Функция ключевого элемента состоит во включении и отключении LC-компенсатора. При этом ключевой элемент выполнен в виде двух встречно-параллельно включенных тиристоров. Через ключевой элемент LC-компенсатор постоянно подключен к нагрузке. Испытания устройства компенсации реактивной мощности на электровозе ВЛ85 [2] показали, что среднее значение коэффициента мощности электровоза повышается до 0,92 и обеспечивается почти двукратное сокращение потребления реактивной энергии на тягу поездов.
Однако применение LC-компенсатора с постоянной величиной тока компенсации повышает коэффициент мощности электровоза лишь при определенных (номинальных) токах нагрузки. Отклонение нагрузки электровоза от номинальной вызывает неполную компенсацию реактивной мощности, что снижает эффективность применения устройства.
Известно также устройство [3], позволяющее частично устранить этот недостаток.
|
|
|
Устройство содержит тяговый трансформатор, нагрузку, в качестве которой используется выпрямительно-инверторный преобразователь, источник реактивной мощности, состоящий из двух LC-компенсаторов, каждый из которых образован последовательным соединением индуктивности и емкости, два ключевых элемента, выполненных каждый в виде двух встречно-параллельно включенных тиристоров. Компенсация реактивной мощности осуществляется при подключении указанных LC-компенсаторов параллельно вторичной обмотке тягового трансформатора.
Испытания устройства компенсации реактивной мощности на электропоезде ЭР29 [4] показали, что при токах нагрузки, превышающих 0,5 от номинального значения, коэффициент мощности превышает 0,97. Однако при токах нагрузки меньше 0,5 от номинального значения имеется значительная перекомпенсация и снижение энергетических показателей электропоезда.
В качестве прототипа изобретения целесообразно принять устройство для компенсации реактивной мощности, содержащее тяговый трансформатор, нагрузку, выполненную в виде выпрямительного преобразователя электровоза с подключенным к нему тяговым двигателем и соединенного своими входами с выводами вторичных обмоток тягового трансформатора, два источника реактивной мощности - первый и второй, каждый из которых образован последовательно соединенными индуктивностью и емкостью, датчик режима сети, включающий в себя датчик напряжения и датчик тока, блок управления и коммутатор, соединенный своими выходами с выводами вторичных обмоток тягового трансформатора, а входами: одним - с выходом блока управления и другими - с указанными источниками реактивной мощности, при этом первичная обмотка тягового трансформатора подключена к питающей сети через датчик тока, датчик напряжения включен параллельно питающей сети, выходы датчика режима сети соединены с соответствующими входами блока управления [5].
|
|
|
Недостатком известного является возникновение ударных токов при подключении коммутатором источника реактивной мощности к вторичной обмотке трансформатора в случае не соответствия напряжения на обмотке трансформатора и на конденсаторе источника реактивной мощности. Кроме того, появление ударных токов ухудшает форму кривой тока питающей сети и снижает коэффициент мощности электровоза.
Техническим результатом является полная компенсация реактивной мощности в различных режимах работы электровоза при любой (синусоидальной и несинусоидальной) форме питающего напряжения и тока.
Существенные отличительные признаки предложения заключаются в том, что дополнительно введены два ключевых элемента - первый и второй, каждый из которых содержит тиристорный ключ, состоящий из двух встречно-параллельно включенных тиристоров, датчик напряжения на тиристорах и формирователь импульсов управления тиристорным ключом, причем датчик напряжения включен параллельно тиристорам, а выходом соединен с первым входом формирователя импульсов управления, соединенного своим выходом с управляющим входом тиристорного ключа, и два резистора, при этом тиристорный ключ первого ключевого элемента включен последовательно с первым источником реактивной мощности, тиристорный ключ второго - последовательно со вторым источником реактивной мощности, вторые входы формирователей импульсов управления первого и второго ключевых элементов соединены с выходом блока управления, а дополнительные резисторы включены: один - параллельно емкости первого источника реактивной мощности и второй - параллельно емкости второго источника реактивной мощности.
Введение в устройство совокупности новых элементов (два ключевых элемента, каждый из которых содержит тиристорный ключ, датчик напряжения и формирователь импульсов управления, и два резистора) и их взаимосвязи позволяют устранить ударные токи при переключениях источников реактивной мощности и регулировать величину реактивной мощности без искажения формы кривой потребляемого из сети тока ударными токами. При этом потребление реактивной мощности из питающей сети сводится к минимуму.
|
|
|
Это обусловлено тем, что устройство изменяет схему подключения источников реактивной мощности к обмоткам тягового трансформатора и тем самым величину реактивной мощности, которая для каждого источника определяется по формуле:

где ω - угловая частота напряжения питающей сети,
С1,2 - емкость конденсатора соответственно первого, второго источника реактивной мощности,
U1,2 - действующее значение напряжения на конденсаторе первого, второго источника реактивной мощности.
Результирующая величина реактивной мощности устройства определяется, как числом источников реактивной мощности подключенных к обмоткам трансформатора, так и величиной напряжения на этих обмотках. Переключения источников осуществляется контакторами коммутатора, а их безударное подключение ключевыми элементами по сигналам блока управления. Сигнал блока управления формируется на основании информации о величине реактивной мощности, определенной по мгновенным значениям тока и напряжения питающей сети, таким образом, чтобы минимизировать величину реактивной мощности электровоза.
На чертеже представлено схема устройства для компенсации реактивной мощности.
Устройство для компенсации реактивной мощности содержит тяговый трансформатор 1, нагрузку 2, в виде выпрямительного преобразователя 3 с подключенным к нему тяговым двигателем 4, первый 5 и второй 6 источники реактивной мощности, датчик режима сети 7, включающий в себя датчик напряжения 8 и датчик тока 9, блок управления 10, коммутатор 11 и два ключевых элемента - первый 12 и второй 13. Первый источник реактивной мощности 5 состоит из соединенных последовательно индуктивности 14 и емкости 15, второй источник реактивной мощности 6 состоит из соединенных последовательно индуктивности 16 и емкости 17. Первый ключевой элемент 12 содержит тиристорный ключ - два встречно-параллельно включенных тиристора 18 и 19, датчик напряжения 20 и формирователь импульсов управления 21. Второй ключевой элемент 13 содержит тиристорный ключ - два встречно-параллельно включенных тиристора 22 и 23, датчик напряжения 24 и формирователь импульсов управления 25.
|
|
|
Дополнительные резисторы 26 и 27 включены параллельно емкостям 15 и 17 первого и второго источников реактивной мощности соответственно.
Нагрузка 2 подключена к выводам вторичных обмоток тягового трансформатора 1, первичная обмотка которого подключена к питающей сети через датчик тока 9, датчик напряжения 8 включен параллельно питающей сети. Выходы датчика режима сети 7 соединены с соответствующими входами блока управления 10. Коммутатор 11 соединен своими выходами с выводами вторичных обмоток тягового трансформатора 1. Один вход коммутатора 11 соединен с выходом блока управления 10. Источники реактивной мощности 5 и 6 соединены последовательно с тиристорными ключами 18, 19 и 22, 23 ключевых элементов 12 и 13 соответственно и подключены к другим входам коммутатора 11. Датчики напряжения 20 и 24 включены параллельно тиристорам 18, 19 и 22, 23 соответственно. Выходы датчиков напряжения 20 и 24 соединены с первыми входами формирователей импульсов 21 и 25, выходы которых соединены с управляющими входами тиристорных ключей 18,19 и 22, 23 соответственно. Вторые входы формирователей импульсов 21 и 25 подключены к выходу блока управления 10.
Предложенное устройство работает следующим образом.
При питании нагрузки 2 от трансформатора 1 напряжение и ток его первичной обмотки имеют не синусоидальную форму, а ток смещен по фазе от напряжения в сторону отставания, что обусловлено индуктивным характером нагрузки. Эти ток и напряжения измеряются датчиками 9 и 8 и подаются на блок управления 10, в котором определяется величина реактивной мощности и формируется сигнал на переключение контакторов коммутатора 11 и подключение соответствующего, например, первого источника реактивной мощности к выбранной вторичной обмотке трансформатора 1. Одновременно сигнал с блока 10 поступает на второй вход формирователя 21. Непосредственное подключение источника реактивной мощности произойдет при включении тиристорного ключа 18,19 путем подачи на его управляющий вход импульса с выхода формирователя 21. Для этого на первый вход формирователя 21 должен поступить сигнал с датчика напряжения 20 о “нулевом” напряжении на тиристорном ключе 18,19. Наличие такого сигнала свидетельствует о равенстве мгновенных значений напряжения на выбранной вторичной обмотке трансформатора и емкости источника реактивной мощности, что исключает появление ударных токов при подключении источника реактивной мощности. Так как переключение источника реактивной мощности может осуществляться от обмотки трансформатора с большим напряжением к обмотке с меньшим напряжением, то для снижения напряжения на емкости 15 предусмотрено сопротивление 26, через которое происходит разряд емкости 15.
Аналогичным образом работает устройство при переключениях второго источника реактивной мощности.
Наличие двух источников реактивной мощности, коммутатора и двух ключевых элементов позволяет регулировать величину реактивной мощности источника и максимально компенсировать реактивную мощность нагрузки в различных режимах работы как с синусоидальной, так и с искаженной формой сетевого напряжения и тока.
Технико-экономическая эффективность предложения определяется тем, что при его использовании минимизируется реактивная мощность, потребляемая от источника питания, и соответственно повышается коэффициент мощности. Результаты испытания устройства для компенсации реактивной мощности показали, что коэффициент мощности электровоза во всем диапазоне изменения нагрузок повысился до 0.95, что в свою очередь привело к снижению расхода электроэнергии на 5%
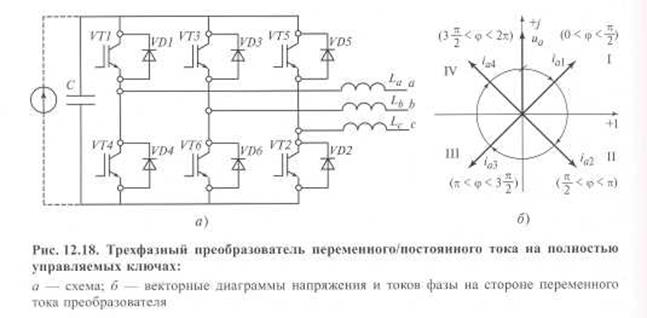
4.4. Преобразователи переменного / постоянного тока на полностью управляемых электронных ключах и их функциональные возможности.
Преобразователь переменного/постоянного тока на полностью управляемых электронных ключах. Согласно определению МЭК 551-11-05 — это преобразователь переменного тока в постоянный или наоборот. Причем, использование полностью управляемых ключей существенно изменяет и расширяет функции такого преобразователя. Во-первых, наличие ключей с полной управляемостью позволяет работать преобразователю во всех возможных режимах, определяющих направление активного тока и характер реактивных токов, т.е. в четырех квадрантах Комплексной плоскости на стороне переменного тока (рис. 12.18). Согласно векторным диаграммам на рис. 12.18, б, преобразователь может работать в следующих режимах:
выпрямительном с отстающим током iа1 (индуктивного характера) в квадранте 1;
инверторном с опережающим током iа2 (емкостного характера) в квадранте II;
инверторном с отстающим током iа3 (индуктивного характера) в квадранте III;
выпрямительном с опережающим током iа4 (емкостного характера) в квадранте IV.
При этом вектор тока в фазах преобразователя может изменяться системой управления как по значению, так и по фазе (р относительно напряжения сети. В результате можно генерировать или потреблять активный ток с коэффициентом мощности соs φ = 1, а емкостной или индуктивный
|
с коэффициентом мощности cos φ= 0. В последнем случае имеет место источник или потребитель реактивной мощности, что позволяет создавать на основе таких преобразователей регуляторы реактивной мощности. Следует отметить, что принципиальная возможность работы в четырех квадрантах существует и в преобразователях на основе тиристоров с введением в схему устройств принудительной (искусственной) их коммутации. Однако такие технические решения не получили широкого практического применения из-за сложности изготовления относительно высокой стоимости таких преобразователей.
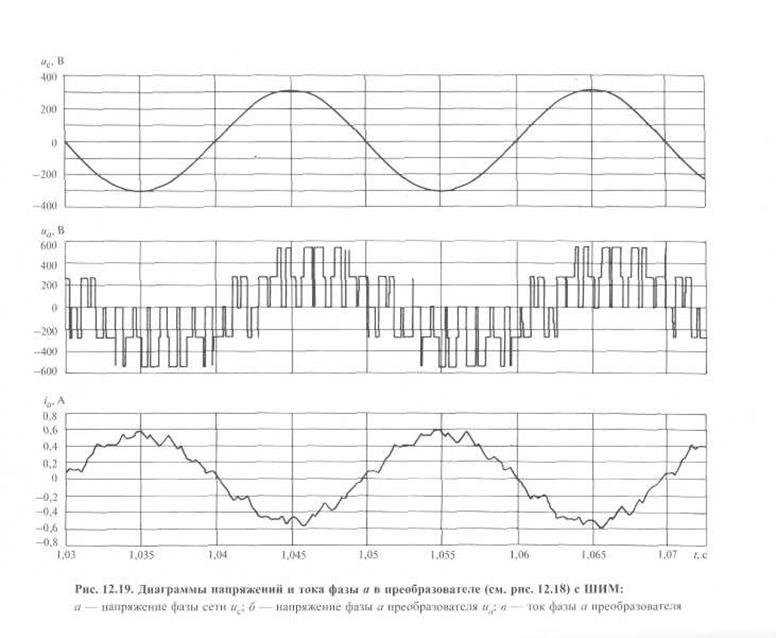
Вторым существенным преимуществом преобразователя на полностью управляемых ключах является возможность организации широтно-импульсной модуляции (ШИМ) напряжения преобразователя на стороне переменного тока. Благодаря ШИМ по заданному закону можно формировать напряжения и соответственно токи, основная составляющая которых является заданной, например, синусоидальной формы (рис. 12.19). Остальные составляющие, являясь более высокочастотными, фильтруются
LС-фильтрами на стороне переменного тока. Так как фильтрации подвергаются высокочастотные составляющие, то параметры фильтра должны иметь хорошие удельные массогабаритные показатели. Обычно для обеспечения удовлетворительных показателей ШИМ необходимо, чтобы частота модуляции превышала примерно на порядок частоту воспроизводимой основной гармоники.
Функциональные возможности преобразователя на полностью управляемых ключах позволяют использовать его для решения актуальных задач в электроэнергетике. Одной из традиционных и важных задач является компенсация реактивной мощности в линиях передачи переменного тока. Для этих целей на основе рассмотренного преобразователя созданы статические компенсаторы реактивной мощности (SТАТСОМ), позволяющие генерировать и потреблять реактивную мощность. При этом их быстродействие составляет доли периода основной частоты, что принципиально выше, чем у существующих компенсаторов на основе синхронных генераторов.
На основе двух соединенных параллельно на стороне постоянного тока преобразователей созданы универсальные регуляторы потока мощности (11РРС). При этом один из преобразователей включается последовательно в линию электропередачи для последовательной компенсации (или регулированию напряжения по значению и фазе), а второй используется в качестве параллельного компенсатора реактивной мощности и обеспечения активной мощности потерь и преобразователя, включенного последовательно. Такое устройство широко применяется при создании гибких линий (РАСТ8).
Перспективной структурой гибких линий является соединение по постоянному току преобразователей, на стороны переменного тока которых могут подаваться асинхронные напряжения. При этом создается воз-
можность изменять направления потоков энергии в различных линиях. Кроме того, в такой структуре практически исчезает линия передачи на постоянном токе. На основе рассмотренного преобразователя созданы активные фильтры, форма тока в котором определяется разностью требуемого синусоидального и существующего искаженного (например, нелинейной нагрузкой) токов.
Типовые структуры систем управления с широтно-импульсной модуляцией в преобразователях переменного/постоянного тока. Согласно определению МЭК 551-16-30, широтно-импульсной модуляцией называется импульсное управление, при котором ширина или частота импульсов, или и та и другая модулируются в пределах периода основной частоты для того, чтобы создать определенную форму кривой выходного напряжения. В большинстве случаев ШИМ осуществляется в целях обеспечения синусоидальности напряжения или тока, т.е. снижения уровня высших гармоник относительно основной (первой) гармоники и называется синусоидальной. Обычно на практике различают следующие основные методы обеспечения синусоидальности:
синусоидальная ШИМ и ее модификации;
избирательное (селективное) подавление высших гармоник;
«гистерезисная» или «дельта» модуляция;
модуляция пространственного вектора.
Классическим вариантом организации синусоидальной ШИМ является изменение ширины импульсов, формирующих выходное напряжение (ток) посредством сравнения сигнала напряжения заданной формы, называемого опорным или эталонным, с сигналом напряжения треугольной формы, имеющим более высокую частоту и называемым несущим сигналом. На рис. 12.20 представлены диаграммы опорных и несущих сигналов трехфазного инвертора напряжения. Опорный сигнал является модулирующим и определяющим требуемую форму выходного напряжения (тока).
В рассматриваемом случае этот сигнал имеет синусоидальную форму и частоту основной (первой) гармоники формируемого напряжения или тока. Существует много модификаций этого метода, в которых модулирующие сигналы представлены специальными функциями, отличными от синусоиды, но при этом цели по снижению уровня определенных гармоник успешно достигаются.
Метод избирательного подавления высших гармоник успешно реализуется средствами микропроцессорных контроллеров на основе соответствующего программного обеспечения.
Третий метод основан на принципах релейного слежения за опорным сигналом, например, синусоидальной формы. В простейшем техническом исполнении этот метод сочетает принципы ШИМ и ЧИМ (частотно-импульсной модуляции). Однако посредством специальных схемотехни-
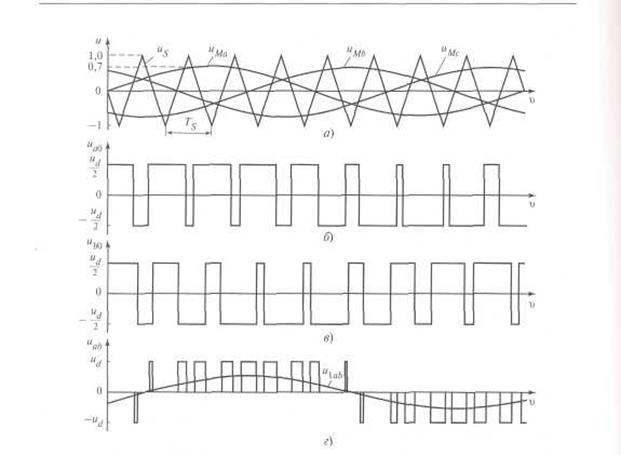
Рис. 12.20. Синусоидальная ШИМ в трехфазном инверторе:
а -- напряжение модулирующих сигналов; б — фазное напряжение иа0; в -напряжение иb0; г — линейное напряжение иаb
ческих мер возможно стабилизировать частоту модуляции или ограничить диапазон ее изменения.
Последний метод является сравнительно новым, связанным с развитием микропроцессорной техники и считается весьма, перспективным для управления трехфазным инвертором, в частности, при использовании их в области электропривода. В то же время он во многом сходен с традиционной синусоидальной ШИМ.
Системы управления на основе ШИМ позволяют не только обеспечить синусоидальную форму усредненных значений основной гармоники напряжения или тока, но и управлять значениями ее амплитуды, частоты и фазы. Так как в этих случаях в преобразователе используются полностью управляемые ключи, то становится возможным реализовать работу преобразователей переменного/постоянного тока совместно с сетью переменного тока во всех четырех квадрантах, как в режимах выпрямления, так и инвертирования с любым заданным значением коэффициента мощности основной гармоники созф, в диапазоне от -1 до 1. Более того, с ростом несущей частоты расширяются возможности воспроизведения на выходе инверторов тока и напряжения заданной формы. Это позволяет создавать активные фильтры для подавления высших гармоник.
В самом общем виде способы реализации управления с ШИМ в преобразователях переменного тока можно разделить на две группы:
с прямым управлением напряжением без обратной связи по току;
с обратной связью по току.
В группах способы реализации управления различаются по используемому методу ШИМ и используемой элементной базе.
Способы первой группы в основном применяются для инверторов напряжения, входящих в состав агрегатов бесперебойного питания. В таких случаях используются как традиционные методы ШИМ, так и новые, например метод пространственного вектора.
На рис. 12.21 приведена обобщенная структурная схема управления и организации синусоидальной ШИМ трехфазного инвертора напряжения с нагрузкой Н. Согласно приведенной структурной схеме, формирование импульсов управления ключами преобразователя происходит в моменты, определяемые сравнением опорных фазных напряжений Uа, Ub и Uс с сигналами треугольной формы несущей частоты, вырабатываемыми генератором несущей частоты ГНЧ. При этом учитывается задаваемый индекс модуляции Ма, который может определяться системой регулирования, не показанной на рисунке. Формирование импульсов управления ключами осуществляется оконечными каскадами управления, входящими в блок формирования импульсов управления в моменты срабатывания компараторов К1 — КЗ, зависящие от уровня сигналов рассогласования 8. В рассматриваемом случае управления преобразователем со свойствами источника напряжения осуществляется ключами S1, S3 и S5, которые включаются
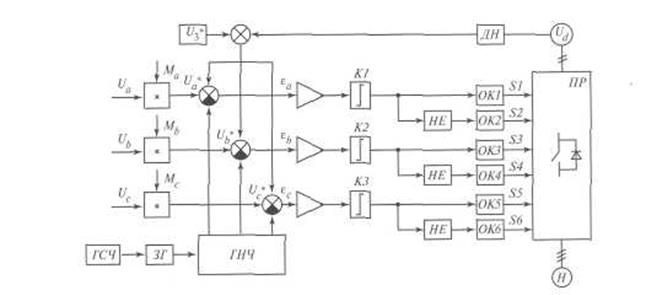
Рис. 12.21. Обобщенная структурная схема управления и организации синусоидальной ШИМ:
ЗГ — задающий гснератор: ОК1 — ОК6 — оконечный каскад управления ключом
при выключенных ключах S4, S6 и S2 наоборот, благодаря логическим элементам НЕ в каналах управления последних. Штриховой линией показаны возможные связи для улучшения характеристик преобразователя, например, добавления к опорным сигналам напряжения 3-й гармоники для расширения линейной части диапазона модуляции напряжения. Кроме того, для «размывания» частотного спектра на генератор несущей частоты ГНЧ могут подаваться сигналы от генератора случайных чисел ГСЧ, которые с учетом функции плотности распределения вероятностей, определяют период треугольной функции несущей частоты. Для коррекции изменений или контроля пульсаций входного напряжения на стороне постоянного тока может быть предусмотрен канал с датчиком напряжения ДН. Рассмотренная структура позволяет реализовать модуляцию как непосредственно на основе сравнения аналоговых, так и цифровых сигналов, формируемых микропроцессорным контроллером. Применение цифровых методов позволяет повысить устойчивость системы управления к типовым возмущениям, обусловленным различного рода погрешностями. На рис. 12.22 приведена упрощенная структурная схема ШИМ пространственного вектора. В данном случае управление осуществляется относительно одного пространственного вектора, выполняющего роль опорного и определяемого с частотой модуляции расчетным путем микропроцессорными средствами. Опорный вектор Us* с учетом индекса модуляции задается в качестве эталонного значения выходного напряжения инвертора. В частности, его значение может поступать из канала автоматического регулирования выходных параметров преобразователя. Тактовая частота, соответствующая частоте модуляции выходного напряжения преобразователя, определяется задающим генератором ЗГ. Эта же частота определяет число коммутаций ключей преобразователя за период основной частоты выходного напряжения преобразователя. На интервале каж-
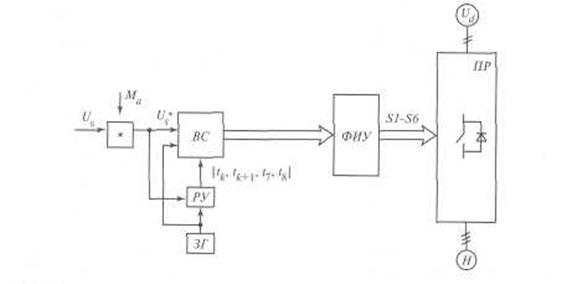
Рис. 12.22. Упрошенная структурная схема управления с ШИМ пространственного вектора
дого такта Тs (или полутакта Ts/2) расчетное устройство РУ производит расчет координат вектора Us* для одного сектора. Затем производится выбор сектора устройством ВС, соответствующего состоянию вектора Us* в данный момент времени, и производится соответствующий пересчет его координат в осях α, β. По результатам перерасчета в блоке формирования импульсов управления ФИУ формируются сигналы на коммутацию соответствующих ключей преобразователя.
Современные способы реализации управления с ШИМ без обратной связи по току позволяют обеспечить широкий диапазон модуляции напряжения, включая режимы сверхмодуляции, ограничить коммутационные потери и уровень высших гармоник. Кроме того они хорошо согласуются с постоянно возрастающими возможностями микропроцессорной техники.
С другой стороны, системы с обратной связью по току имеют более высокое быстродействие при возмущениях со стороны нагрузки, позволяя улучшить динамические характеристики преобразователей. Использование обратной связи по току повышает точность управления при изменении мгновенных значений тока и обеспечивает эффективную защиту преобразователя от перегрузок по току. На рис. 12.23 представлена упрощенная структурная схема управления преобразователя переменного/постоянного тока со свойствами инвертора напряжения с обратной связью по току нагрузки. Существуют разнообразные способы реализации ШИМ на основе отрицательной связи по току нагрузки. Среди них можно выделить способы непосредственного слежения реального тока iL
за эталонным его значением iL* в пределах полосы, ширина δ, которой
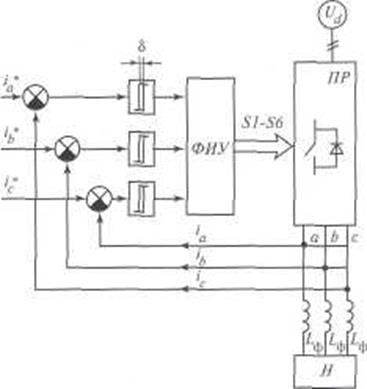
Рис. 12.23. Упрощенная структурная схема управления преобразователем переменного/постоянного тока с отрицательной обратной связью по току нагрузки
определяет частоту коммутации ключей. Такие системы «гистерезисного» типа широко распространены благодаря простоте практической реализации. Известным недостатком этих систем является изменение частоты коммутации в процессе слежения за нелинейным, например, синусоидальным сигналом. Существуют способы, ограничивающие диапазон изменения частоты, но их эффективность не велика, а возможности ограничиваются разностью частот модулируемого сигнала и несушей частоты, отношение которых должно различаться более чем на порядок. Последнее становится особенно существенным при модуляции в активных фильтрах для устранения гармоник высокого порядка. Следует также отметить, что дискретная реализация «гистерезисного» принципа в цифровых системах управления требует в отличие от аналоговых систем существенного повышения рабочей частоты микроконтроллера и быстродействия АЦП для обеспечения заданной шириной полосы 5 точности управления. В таких случаях целесообразным становится применение «прогнозных» методов модуляции, учитывающих скорость изменения контролируемых параметров.
Развитие активных фильтров и компенсаторов реактивной мощности вызвало необходимость создания систем с ШИМ, позволяющих управлять отдельными гармониками или спектрами гармоник несинусоидальных тока и напряжения. Эта необходимость вытекает из принципа действия различных компенсаторов неактивной мощности, включая активные фильтры. Рассмотрим более подробно типовые структуры и звенья систем управления с ШИМ для решения этих задач на примере систем управления преобразователями переменного/постоянного тока со свойствами источника напряжения. При этом для обобщения их характерных свойств допустим, что они могут выполнять функции следующих видов регуляторов неактивной мощности:
активных фильтров;
гибридных фильтров;
компенсаторов реактивной мощности основной гармоники (СТАТКОМов).
Во всех этих случаях силовой преобразователь содержит на стороне постоянного тока конденсатор для обмена неактивной мощностью между преобразователем и сетью переменного тока. Обобщенная структурная однолинейная схема такого преобразователя приведена на рис. 12.24, где ключи силовой части преобразователя Пр управляются от блока формирователя импульсов управления ФИУ Алгоритмы управления реализуются в блоке микропроцессорной системы управления МПСУ, на вход которой поступают сигналы с датчиков токов нагрузки и преобразователя iL линейного напряжения сети uс и напряжения на конденсаторе иd. Поскольку для управления отдельными гармониками или частью спектра несинусоидальных сигналов необходима информация о них, в состав МПСУ должны входить фильтры. Анализ различных методов фильтрации сигналов для этих целей показал, что наиболее эффективными являются
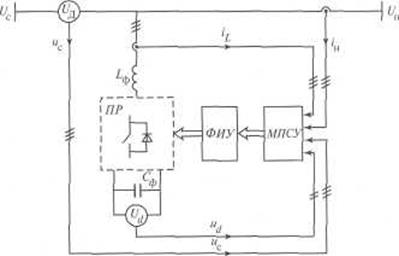
Рис. 12.24. Обобщенная структурная схема регулятора неактивной мощности
цифровые фильтры сигналов, преобразованных из координат трехфазной сбалансированной системы в систему двухфазных ортогональных координат. Преобразованная трехфазная/двухфазная система координат должна быть синхронизирована с частотой и фазой напряжения сети. Для этого в систему входит блок синхронизации, основой которого является система фазовой автоподстройки частоты (ФАПЧ). По принципу действия ФАПЧ является следящей системой автоматического регулирования, обеспечивающей высокую точность подстройки частоты в установившемся режиме. Упрощенные структурные схемы МПСУ и их отдельные блоки представлены на рис. 12.25—12.29. В схеме МПСУ для компенсатора реактивной мощности основной гармоники (рис. 12.25) выделены три основных блока, на вход которых поступают внешние сигналы от датчиков, контролирующих параметры, и задания величин реактивной мощности:
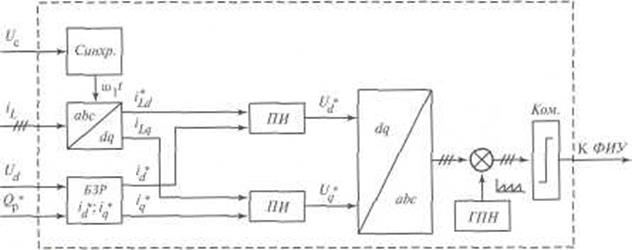
Рис. 12.25. Структурная схема микропроцессорной системы управления для работы преобразователя в режиме компенсатора реактивной мощности
1. Блок синхронизации (синхр), обеспечивающий генерацию опорных единичных синусоидальных сигналов, синхронизированных по частоте и фазе с напряжением сети.
2. Блок синхронного преобразования координат abc/dq, на вход которого поступают сигналы от датчиков тока трех фаз преобразователя, контролируемых в реакторах выходных фильтров. Этот блок вычисляет значения токов в координатах dq с использованием единичного сигнала блока синхронизации.
3. Блок расчета задания БРЗ получает сигналы с датчика напряжения на конденсаторе преобразователя. Сигнал задания величины и характера реактивной мощности поступает либо от внешней системы управления компенсатором, либо определяется самим БРЗ. Сигнал, определяющий значение напряжения на конденсаторе, используется для компенсации потерь активной мощности в компенсаторе, обеспечивая поддержание заданного уровня напряжения на конденсаторе.
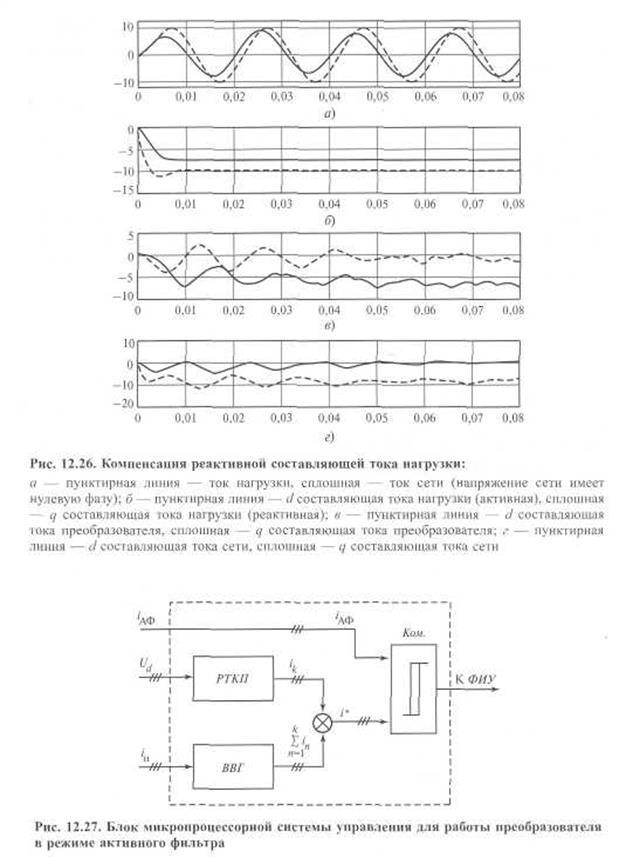
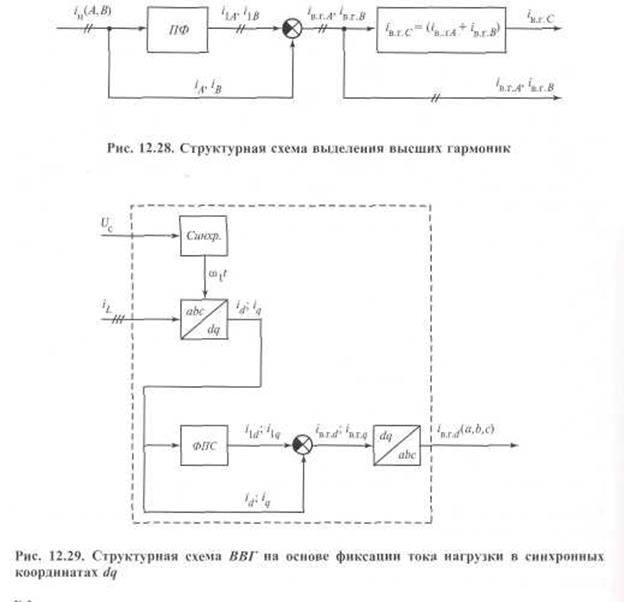
Разница между реальными и заданными токами в системе координат abc/dq поступает на блоки ПИ с пропорционально-интегральными передаточными функциями для частотной коррекции сигналов рассогласования, а затем на вход блока обратного преобразования координат abc/dq. Выходные сигналы с этого блока сравниваются с сигналами генератора пилообразного напряжения /77//, вырабатывающего треугольные сигналы с тактовой частотой коммутации ключей преобразователя. Компаратор Ком. формирует импульс управления в фазах, соответствующих разности сигналов ГПН и блока abc/dq, которые затем поступают на оконечные каскады формирователей импульсов управления ФИУ. Диаграммы сигналов, иллюстрирующие работу преобразователя в режиме компенсации реактивной мощности, основной гармоники приведены на рис. 12.26. Схема МПСУ для преобразователя, работающего в режиме активного фильтра, приведена на рис. 12.27. Эта схема рассчитана на реализацию «гистерезисного» принципа слежения за токами преобразователя. Схема включает в себя два основных блока, определяющих ток задания i * в следящей системе.
1. Блок расчета тока компенсации потери РТКП, на вход которого поступает сигнал от датчика напряжения Ud,на конденсаторе преобразователя. Этот блок рассчитывает значение активного тока, необходимых для компенсации потерь мощности в преобразователе и, следовательно, поддержания напряжения на конденсаторе на заданном уровне.
2. Блок выделения высших гармоник ВВГ выделяет на основе цифровых фильтров требуемую часть спектра высших гармоник iп тока нагрузки iL. Сумма токов iп и iк определяет ток задания i*. Ток задания i * и выходной ток преобразователя iAФ поступают на компаратор Ком, обеспечивая формирование импульсов управления для коммутации ключей преобразователя. Блок ВВГ может иметь различное схемотехническое
|
исполнение. На рис. 12.28 приведен пример схемы ВВГ на основе выделения высших гармоник из фаз А, В с последующим определением их содержания в фазе С. В этом варианте высшие гармоники токов нагрузки фаз А и В выделяются цифровыми полосовыми фильтрами ПФ. Ток фазы С вычисляется по найденным значениям токов двух других фаз.
На рис. 12.29 представлена структурная схема ВВГ на основе фильтрации составляющих тока нагрузки в синхронных координатах dq. Первые гармоники тока в синхронных координатах являются постоянными во времени значениями. Поэтому их можно выделять в виде среднего значения, используя фильтры переменной составляющей. В результате обратного преобразования координат dq/abc будут получены высшие гармоники токов нагрузки.
|
|
|
|
|
Дата добавления: 2015-05-06; Просмотров: 2286; Нарушение авторских прав?; Мы поможем в написании вашей работы!