КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приведите и поясните схемы включения асинхронного двигателя и П-образную схему замещения асинхронного двигателя
|
|
|
|
Поясните способ регулирования координат электропривода с двигателем постоянного тока независимого возбуждения изменением магнитного потока. Приведите соответствующие статические характеристики и формулы.
Поясните способ регулирования координат электропривода с двигателем постоянного тока независимого возбуждения изменением подводимого к якорю напряжения. Приведите соответствующие статические характеристики и формулы.
Поясните способ регулирования координат электропривода с двигателем постоянного тока независимого возбуждения с помощью резисторов в цепи якоря. Приведите соответствующие статические характеристики и формулы.
Данный способ регулирования координат ДПТ НВ применяется при невысоких требованиях к показателям качества регулирования, но отличается универсальностью и простотой реализации. На рисунке 2.5 приведена схема включения ДПТ НВ при регулировании координат с помощью резисторов в цепи якоря.
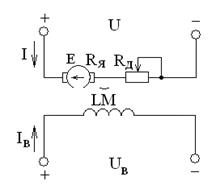
Рисунок 2.5 – Схема включения ДПТ НВ при регулировании координат с помощью резисторов в цепи якоря
Из формулы (7) видно, что скорость идеального холостого хода не зависит от добавочного сопротивления Rд в цепи якоря двигателя (рисунок 2.6), а наклон характеристик тем больше, чем больше Rд, поэтому семейство механических (электромеханических) характеристик ДПТ НВ изображается в виде совокупности линий различного наклона (жёсткости), проходящих через одну и туже точку на оси скорости с координатой ω0 (рисунок 2.6).
 (7)
(7)
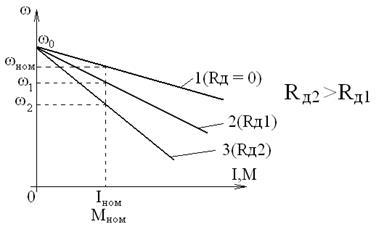
Рисунок 2.6 – Статические характеристики ДПТ НВ при введении добавочных сопротивлений в цепь якоря
Оценим данный способ по основным показателям регулирования:
|
|
|
1 Диапазон регулирования скорости  .
.
2 Направление регулирования скорости – вниз от номинальной.
3 Плавность регулирования скорости – определяется перепадом скорости при переходе с одной искусственной характеристики на другую при одинаковой нагрузке. Зависит от характера изменения Rд.
4 Стабильность скорости – характеризуется изменением скорости при возможных колебаниях момента нагрузки на валу двигателя и определяемая жёсткостью его характеристик. Стабильность скорости снижается по мере увеличения диапазона регулирования, т.к. уменьшается жёсткость регулировочных характеристик.
5 Экономичность способа регулирования скорости – определяется первоначальными денежными затратами на реализацию способа, стоимостью затрат на его обслуживание в процессе эксплуатации, а также стоимостью потерь энергии в регулировочном устройстве. Способ является недорогим с точки зрения затрат на его осуществление и обслуживание, но оказывается очень неэкономичным с точки зрения потерь энергии в регулировочном резисторе.

где δ – относительный перепад скорости.
Из приведенной формулы видно, что чем больше δ, т.е. чем больше скорость будет отличаться от скорости идеального холостого хода, тем большая часть потребляемой из сети мощности Р1 будет расходоваться на потери. Т.е. при диапазоне D = 2, КПД двигателя будет меньше 50%.
При использовании этого способа магнитный поток обычно уменьшается по сравнению с номинальным, так как магнитная система ДПТ в номинальном режиме находится в насыщении, и увеличение тока возбуждения не приводит к заметному росту магнитного потока, а вызывает лишь дополнительный нагрев обмотки возбуждения, что видно из характеристики намагничивания ДПТ НВ (рисунок 2.9).
Для регулирования тока возбуждения обычно используется включение в цепь обмотки возбуждения добавочного резистора или питание обмотки возбуждения от управляемого выпрямителя (изменение напряжения на обмотке возбуждения). Схемы питания обмотки возбуждения в этих случаях показаны на рисунке 2.10.
|
|
|

Рисунок 2.9 – Кривая намагничивания ДПТ НВ
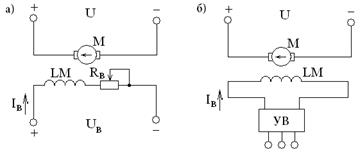
Рисунок 2.10 – Регулирование тока возбуждения ДПТ НВ
На рисунке 2.11 показаны статические характеристики ДПТ НВ при уменьшении магнитного потока. а приведенные ниже формулы поясняют положение искусственных характеристик 2 и 3 по отношению к естественной характеристике 1.
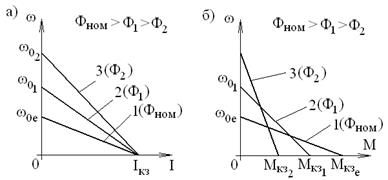
Рисунок 2.11 – Статические характеристики ДПТ НВ
 ,
,  ,
, 
1 Диапазон регулирования скорости при данном способе равен 3÷4.
2 Направление регулирования скорости – вверх от номинальной.
3 Плавность регулирования скорости определяется плавностью регулирования тока возбуждения.
4 Стабильность скорости достаточно высокая, хотя она и снижается при уменьшении магнитного потока.
5 Способ экономичен, т.к. не сопровождается значительными потерями мощности, а реализация его не требует больших капитальных затрат.
Данный способ является в настоящее время наиболее эффективным и широко используемым. Обеспечивая большой диапазон регулирования скорости, этот способ является одновременно очень экономичным. По этой причине, этот способ является основным при создании автоматизированных ЭП постоянного тока.
Реализация этого способа предусматривает питание якоря ДПТ НВ от преобразователя, выходное напряжение которого регулируется по величине и может изменяться при необходимости по полярности. Поскольку основным источником питания ЭП служит сеть переменного тока, то таким преобразователем является управляемый выпрямитель (УВ). Схема ЭП при питании якоря двигателя от управляемого выпрямителя показана на рисунке 2.12,а.
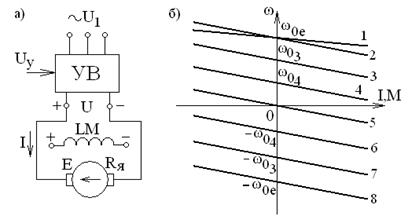
Рисунок 2.12 – Регулирование скорости ДПТ НВ изменением напряжения
Управляемый выпрямитель УВ характеризуется величиной ЭДС ЕП, а также внутренним сопротивлением RП.
Напряжение на выходе управляемого выпрямителя определяется выражением:
 (1)
(1)
Выражения электромеханической (2) и механической (3) характеристик ДПТ НВ при регулировании напряжения на якоре с помощью УВ получаем из математического выражения электромеханической и механической характеристик ДПТ НВ, путём подстановки в них формулы (1).
|
|
|
 (2)
(2)
 (3)
(3)
Статические характеристики системы «управляемый выпрямитель – двигатель»приведены на рисунке 2.12,б. Характеристика 1 является естественной, а остальные – искусственные. Естественная характеристика построена при питании якоря ДПТ НВ от источника с нулевым внутренним сопротивлением, поэтому она имеет меньший наклон по сравнению с искусственными характеристиками. При изменении ЕП пропорционально изменяется скорость идеального холостого хода ω0. Характеристики располагаются во всех четырёх квадрантах параллельно друг другу. При ЕП = 0 (характеристика 5) ДПТ работает в режиме динамического торможения.
Характеристики 2-8 построены соответственно при следующих значениях ЭДС управляемого выпрямителя.
Еп2 > Еп3 > Еп4; Еп5 = 0; Еп6 = – Еп4; Еп7 = –Еп3; Еп8 = – Еп2.
9 Опишите способы пуска двигателя постоянного тока, дайте определение понятию «пусковая диаграмма двигателя постоянного тока».
В установившемся режиме работы ток якоря ДПТ НВ определяется по формуле:

При пуске, когда скорость вращения якоря ω равна нулю, ЭДС якоря также равна нулю, что вызывает увеличение тока якоря при пуске: 
Пусковой ток при этом определяется выражением:


Так как сопротивление якоря ДПТ обычно имеет величину от долей Ома до нескольких Ом, то кратность пускового тока составляет IП = (3 – 20)IНОМ. Первая цифра в скобках соответствует двигателям малой мощности, вторая – двигателям большой мощности.
Увеличение пускового тока в двигателях малой мощности не вызывает опасных последствий, так как кратность тока невелика, а продолжительность процесса пуска небольшая. Поэтому двигатели малой мощности (до 1 кВт) пускают в ход непосредственным включением в сеть. У двигателей мощностью более 1 кВт кратность пускового тока гораздо выше, а время разгона якоря продолжительней. Большая кратность пускового тока вызывает сильное искрение на коллекторе, и может привести к резкому падению напряжения питающей сети, что может плохо отразиться на работе других потребителей энергии, включенных в ту же сеть. Поэтому для пуска двигателей мощностью более 1 кВт принимают специальные меры для ограничения пускового тока. Обычно это пусковые реостаты, включенные последовательно в цепь якоря.
|
|
|
Для пуска двигателя большой мощности использование пусковых реостатов нецелесообразно из-за больших размеров реостатов и больших потерь в них. Поэтому такие двигатели запускаются методом понижения напряжения.
Пусковой диаграммой называется совокупность двух и более искусственных характеристик, используемых при пуске двигателя (рисунок 2.8).
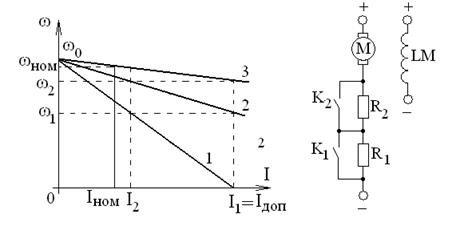
Рисунок 2.8 – Пусковая диаграмма и схема пуска ДПТ НВ
Двигатель запускается по искусственной характеристике 1. При включении ток и момент двигателя ограничиваются до допустимого уровня
суммарным сопротивлением ступеней R1 и R2. При скорости ω1, когда ток в цепи якоря уменьшается до значения  ключом К1 закорачивается ступень R1, и двигатель переходит на искусственную характеристику 2, соответствующую включению в цепь якоря ступени R2.. При скорости ω2 ключом К2 закорачивается ступень R2, и двигатель выходит на естественную характеристику 3, по которой продолжает разгон до номинальной скорости.
ключом К1 закорачивается ступень R1, и двигатель переходит на искусственную характеристику 2, соответствующую включению в цепь якоря ступени R2.. При скорости ω2 ключом К2 закорачивается ступень R2, и двигатель выходит на естественную характеристику 3, по которой продолжает разгон до номинальной скорости.
Схемы включения АД с фазным и короткозамкнутым ротором представлены на рисунке 3.1.

Рисунок 3.1 – Схемы включения АД
Трехфазный АД имеет трехфазную обмотку статора, которая подключается к сети переменного тока и создаёт в двигателе вращающееся магнитное поле, и обмотку ротора, которая может быть выполнена по двум вариантам. Первый вариант – это фазный ротор, его обмотка выполнена из медного провода и имеет выводы на три контактных кольца, с помощью которых осуществляется контакт с внешними цепями. Двигатель с таким ротором имеет дополнительные возможности по регулированию координат, в первую очередь момента, схема его включения приведена на рисунке 3.1,а.
Второй вариант – АД с короткозамкнутым ротором. Его обмотка выполняется заливкой алюминия в пазы сердечника ротора и представляет собой конструкцию типа “беличье колесо”. Двигатель с короткозамкнутым ротором является более простым, дешевым и надежным. Схема его включения приведена на рисунке 3.1,б.
Для получения выражений электромеханической и механической характеристик АД используется его схема замещения, в которой ток, ЭДС и параметры цепи ротора приведены к цепи статора, что позволяет изобразить эти две цепи на схеме электрически связанными, хотя в действительности связь между ними осуществляется через электромагнитное поле. Приведение параметров производится с помощью коэффициента трансформации АД по ЭДС.
На рисунке 3.2 представлена П-образная схема замещения АД.
Рисунок 3.2 – П-образная схема замещения АД
Эта схема может использоваться для вывода формул статических характеристик АД. На схеме приняты следующие обозначения: U1Ф - действующее значение фазного напряжения сети; I1, Iμ, I'2 – фазные токи статора, намагничивания и приведенный ток ротора; R1 – суммарное активное сопротивление фазы статора; R'2 – приведенное суммарное активное сопротивление фазы ротора; x1 и x'2 - индуктивные сопротивления фазы статора и приведенное фазы ротора; Rμ и xμ - параметры цепи намагничивания; S – скольжение АД.
|
|
|
|
|
Дата добавления: 2015-04-24; Просмотров: 2024; Нарушение авторских прав?; Мы поможем в написании вашей работы!