КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
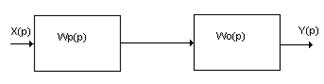
Принцип разомкнутого управления (принцип прямой связи)
|
|
|
|
Если известны действующие на систему возмущения и известна желаемая реакция на выходе системы, то можно определить передаточную функцию регулятора.
 .
.
Сущность принципа состоит в том, что алгоритм управления строится только на основе заданного алгоритма функционирования и не контролируется по фактическому значению управляемой координаты объекта.
Достоинства:
- Высокая скорость реакции на внешние воздействия;
- Система не может быть в принципе неустойчивой.
Недостатки:
1. Чувствительность к изменению параметров элементов;
2. Невозможно получить высокую точность при неизвестных возмущениях и низкой точности модели объекта;
3. Невозможность полной компенсации возмущений для объектов с транспортной задержкой;
4. Проблема физической реализуемости обратных операторов.
Примеры: пневмо - и гидроэлектроклапаны, которые по получении электрического сигнала открывают или закрывают проход топлива, воздуха или парогаза к агрегатам, автоматические станочные линии, торговые автоматы, информационные табло железнодорожных и аэровокзалов и др.
2. Принцип обратной связи (принцип управления по отклонению контролируемой функции от входного воздействия, принцип Ползунова-Уатта)
Сущность принципа обратной связи заключается в том, что регулятор вступает в работу только тогда, когда между текущим и заданным значениями регулируемой функции появляется рассогласование, и регулятор воздействует на объект таким образом, чтобы свести это рассогласование к нулю или к малой величине.
Принцип внутренне противоречив, ибо прежде чем ликвидировать ошибку необходимо допустить ее возникновение.
Без обратной связи невозможно учесть влияние неизвестных факторов, неполноту знаний об объекте.
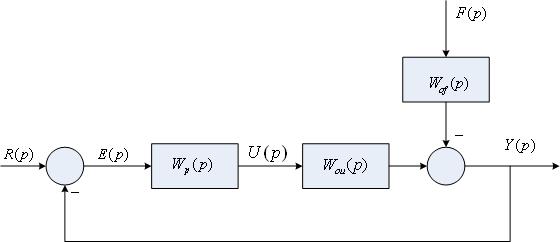
В рассматриваемом случае уравнение системы регулирования будет иметь вид

Если Wp(p) по модулю во всех режимах работы системы сделать достаточно большим [в идеале |Wp(jω)|®¥], то у®r, так как при этом условии Wзf(p) будет стремиться к нулю, а Wзr(p) - к единице. Следовательно, регулирование по отклонению позволяет одновременно уменьшить влияние на систему возмущающих воздействий f и увеличить точность воспроизведения заданного входного воздействия r.
| Регулятор вырабатывает в системе изменение y(t), направленное навстречу начальному отклонению, вызвавшему работу регулятора, то есть стремится компенсировать возникшее отклонение. |
Обратные связи в регуляторе или объекте называются местными обратными связями.
Если система линейная и звенья статические, то в установившемся режиме 
 тогда
тогда  где обозначим k=kpky – общий передаточный коэффициент разомкнутой цепи регулирования.
где обозначим k=kpky – общий передаточный коэффициент разомкнутой цепи регулирования.
Уравнение статического равновесия имеет вид 
При увеличении k влияние ¦ уменьшается, поэтому достоинством этого принципа регулирования является его универсальность по отношению к возмущениям, а недостатком – склонность системы к неустойчивому режиму работы.
Установившаяся ошибка регулирования в статической системе с единичной отрицательной обратной связью (статическая ошибка)  если k>>1, то
если k>>1, то 
Достоинства:
1. Регулирование по отклонению позволяет уменьшить влияние на систему всех возмущающих воздействий;
2. Увеличивается точность воспроизведения заданного входного воздействия;
3. На динамические свойства объекта никаких ограничений не накладывается. Следовательно, регулирование по отклонению применимо к любым объектам, в том числе и к неустойчивым;
4. Отсутствие необходимости замера возмущений, что очень важно с практической точки зрения;
5. Отсутствие жёстких требований к стабильности характеристик элементов регулятора и объекта.
Недостатки:
1. Принципиально нельзя получить регулирование без ошибки, так как ошибка
регулирования является сигналом, который управляет регулирующим органом;
2. Склонность системы к неустойчивому режиму работы;
3. Замедленная реакция системы на изменения возмущающего воздействия, так как управляющее воздействие на объект формируется по изменению выходной координаты;
4. Уменьшается коэффициент усиления замкнутой системы относительно коэффициента усиления разомкнутой системы.
Управление – фундаментальная философская категория, решающая задачу формирования управляющих воздействий.
Регулирование – производная философская категория, решающая задачу отработки заданных воздействий.
Системы автоматического регулирования (САР) отличаются от систем автоматического управления (САУ) тем, что в последних происходит как формирование (выработка) желаемого поведения объекта на основании цели управления в виде задающих (управляющих) воздействий, так и их отработка; в САР происходит лишь их отработка, а сами управляющие воздействия, поступающие на элемент сравнения, считаются заданными.
Теория автоматического регулирования является основой построения первого уровня, а теория автоматического управления – основой всей иерархической структуры информационных процессов управления, необходимых для комплексной автоматизации сложных объектов.
Принцип действия любой САР состоит в том, чтобы обнаружить отклонения регулируемых величин, характеризующих работу машины, или протекание процесса от требуемого режима, и при этом воздействовать на машину или процесс так, чтобы устранить возникшие отклонения.
В теории автоматического регулирования основными являются проблемы: устойчивости, управляемости, наблюдаемости, качества переходных процессов, динамической точности, автоколебаний, оптимизации, синтеза и идентификации.
Пример 3. Определить уравнение статики системы регулирования напряжения генератора постоянного тока.

где k=kг×kу, kг=F(Uг) определяется при Iн=0.
Выходная статическая характеристика САР.
|
|
|
|
|
Дата добавления: 2015-05-09; Просмотров: 3708; Нарушение авторских прав?; Мы поможем в написании вашей работы!