КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Устойчивость и качество систем управления [2, 13]
Управляемость и наблюдаемость. Задача управления системой состоит в определении такой функции u(t), при которой осуществляется целенаправленное движение (изменение состояния) системы. Всегда ли эта задача имеет решение? Ответ на этот вопрос дают два свойства системы – управляемость и наблюдаемость.
Линейная система является управляемой, если она может быть переведена из любого начального состояния y(0) в любое конечное состояние y(T) за конечное время Т.
Линейная система является наблюдаемой, если любое ее состояние y(0) можно восстановить по значениям u(t) и y(t), измеренным на интервале 0 > t > T.
Устойчивость систем. При возмущениях в системе возникают колебания Y(t), которые могут быть затухающими, незатухающими, стремящимися к положению равновесия, или уходящими от него (неустойчивые).
Систему называют устойчивой, если будучи выведенной из состояния равновесия она возвращается (с допустимой погрешностью) к прежнему положению после снятия возмущающего воздействия. Простейшая аналогия устойчивости – шарик внутри вогнутой поверхности, который всегда возвращается в самое нижнее положение на поверхности независимо от того, выведен ли он из этого положения движением самой поверхности или импульсным воздействием на шарик. Шарик на выпуклой поверхности – пример неустойчивой системы.
При определении устойчивости системы рассматривается ее свободное поведение при равенстве нулю возмущающих входных воздействий. Состояние системы определяется однородным дифференциальным уравнением замкнутой системы:
an y(n) + an-1 y(n-1) + … +a1 y' + a0 = 0.
Характеристическое уравнение:
an p(n) + an-1 p(n-1) + … +a1 p' + a0 = 0. (2.5.1)
Общее решение: Y(t) =  Ck exp(pkt), если pk – действительные корни.
Ck exp(pkt), если pk – действительные корни.
Положение А.М. Ляпунова для определения устойчивости систем по корням характеристического уравнения:
1. Если характеристическое уравнение линеаризованной системы имеет все корни с отрицательными действительными числами, то система устойчива.
2. Если хотя бы один корень имеет положительную часть, то система неустойчива.
3. При наличии нулевых или чисто мнимых корней поведение реальной системы не всегда (даже качественно) определяется её линеаризованным уравнением.
Точность работы систем. Устойчивость является необходимым, но не достаточным условием для реализации систем. Одна из основных характеристик качества регулирования – это точность, под которой понимается величина ошибки регулирования в различных установившихся режимах.
В системах стабилизации таким режимом является установившееся состояние (положение равновесия), а точность системы характеризуется величиной статической ошибки eст отклонения от заданного состоянии при влиянии дестабилизирующих воздействий. Самым простым способом изучения точности является использование передаточной функции по ошибке (мера малости ошибки слежения):
We(p) = 1/(1+W(p)), (2.5.2)
и меры точности воспроизведения задающего воздействия:
Wз(p) = W(p)/(1+W(p)). (2.5.3)
Для абсолютно точной системы We(p) = 0, Wз(p) = 1. Реальные частотные характеристики систем отличаются от идеальных без превышения заданного значения статистической ошибки в некоторой полосе пропускания от wн до wв. Соответственно, для повышения точности необходимо обеспечивать выполнение условий: We(p) → 0, Wз(p) → 1.
Если допустимая ошибка мала, необходимо применять регуляторы с интегральной составляющей в законе регулирования, обеспечивающие регулирование без статической ошибки. Следует учитывать также, что ошибка слежения зависит от вида задающего воздействия и связано со всеми производными входного сигнала. При отсутствии в системе интеграторов линейно возрастающие и степенные воздействия могут приводить к неограниченному нарастанию ошибок слежения.
Для систем с обратной связью передаточная функция при размыкании системы (разрыве обратной связи) определяется выражением:
Wpc(p) = K(b0 pm + b1 pm-1 +…+1)/ (a0 pm + a1 pm-1 +…+1), (2.5.4)
где К- коэффициент усиления (K=Wpc(0)). Отсюда следует, что увеличение К разомкнутой системы является одним из основных способов повышения точности систем. Однако это не означает, что таким способом можно реализовать любую желаемую точность, так как при чрезмерном увеличении К возможна потеря устойчивости замкнутой системы.
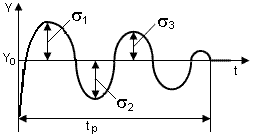 Рис. 2.5.1.
Рис. 2.5.1.
|
Качество работы систем. Интегральные показатели качества системы определяются, как правило, непосредственно по кривой переходного процесса (после включения системы или по реакции на единичную входную ступеньку), условный пример которого приведен на рис. 2.5.1, где: s – динамические отклонения управляемой величины от задания Yo (установившегося режима), tp – время регулирования, т.е. продолжительность переходного процесса (характеризует быстродействие системы).
Степень затухания:
y = (s1 – s3)/ s1.
Коэффициент перерегулирования (для переходных процессов с колебательным режимом):
h = 100(s2 / s1) %.
Интегральный критерий качества:
I =  | s(t)| dt.
| s(t)| dt.
Интегральный квадратичный критерий качества:
I = s2(t) dt.
Чем меньше оценка значений коэффициента перерегулирования и критерия качества, тем лучше качество переходного процесса системы.
литература
2. Повзнер Л.Д. Теория систем управления: Учебное пособие для вузов. - М.: Изд. МГГУ, 2002. - 472 с.
7. Туманов М.П. Теория автоматического управления: Лекции. URL: http://elib.ispu.ru/library/lessons/Tihonov_2/index.htm.
8. Туманов М.П. Теория управления. Теория линейных систем автоматического управления: Учебное пособие. – МГИЭМ. М., 2005, 82 с. URL: http://window.edu.ru/window_catalog/files/r24738/5.pdf.
9. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1975.
13. Бирюков С.В. Основные понятия теории автоматического управления. - URL: http://bookz.ru/rar/bookz/teacher/tau_ucheb.rar
Главный сайт автора ~ Лекции по ОТУ
О замеченных опечатках, ошибках и предложениях по дополнению: [email protected].
|
|
Дата добавления: 2015-05-09; Просмотров: 309; Нарушение авторских прав?; Мы поможем в написании вашей работы!