КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регуляторы с ИМ постоянной скорости
|
|
|
|
В системах регулирования давления, расхода и других величин управление регулируемыми клапанами, вентилями, задвижками, шиберами до настоящего времени осуществляется через исполнительные механизмы.
Исполнительные механизмы бывают с электрическим (преимущественно), гидравлическим или пневматическим приводом. В качестве электрического привода используются асинхронные двигатели, которые, как правило, получают питание от сети 380/220 В и могут быть в трех состояниях: перемещение рабочего органа с постоянной скоростью S, неподвижность, перемещение в обратную сторону с постоянной скоростью.
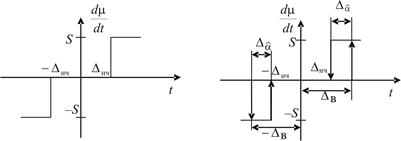
Без учета времени разгона и торможения статическая характеристика такого ИМ представлена на рис. 14.28 и может быть записана в виде

где m – перемещение рабочего органа;
Z – выходной сигнал пускового релейного устройства;
 – скорость рабочего органа;
– скорость рабочего органа;
 – зона нечувствительности релейного элемента, управляющего пусковым оператором (магнитный пускатель, электромагнитное реле и т.п.).
– зона нечувствительности релейного элемента, управляющего пусковым оператором (магнитный пускатель, электромагнитное реле и т.п.).
Такая статическая характеристика называется трехпозиционной.
Чаще всего для снижения частоты включения релейного элемента в характеристику включают «люфт» (зону неоднозначности) Da^, как показано на рис. 14.29, где Dв – зона включения.
Это соответствует реальности, если электромагнитные аппараты срабатывают при большом, а отпускают при меньшем значении выходного сигнала. Такая характеристика формируется также непосредственно промышленным регулятором.
Статическая характеристика ИМ существенно нелинейна. Однако такой ИМ может иметь выходной сигнал, достаточно близкий к линейной характеристике при релейно-импульсном изменении входного сигнала. Пусть на вход ИМ поступают импульсы Z с периодом следования Т пер и скважностью  . Тогда характер перемещения будет иметь вид, представленный на рис. 14.30.
. Тогда характер перемещения будет иметь вид, представленный на рис. 14.30.
|
|
|
| Рис. 14.28. Релейный элемент с зоной нечувствительности | Рис. 14.29. Релейный элемент с зоной нечувствительности и люфтом |

Рис. 14.30. Характер перемещения ИМ
при релейно-импульсном изменении
входного сигнала
Скорость перемещения во время импульса равна:  .
.
Средняя скорость перемещения будет равна: 

Таким образом, ИМ постоянной скорости по каналу «скважности импульсов – усредненное перемещение» можно представить интегрирующим звеном  .
.
Реализация И-регулирования будет тем точнее, чем меньше Т пер. Однако или этом повышается частота включения ИМ, следовательно, и его износ. Величина Т пер, как будет показано ниже, будет зависеть от величины Dв, Dнч, частоты среза разомкнутой САР объекта управления.
Передаточная функция ПИ-регулятора  , его реализация приведена на рис. 14.31, переходная характеристика при рассогласовании
, его реализация приведена на рис. 14.31, переходная характеристика при рассогласовании  (постоянный сигнал) – на рис. 14.32.
(постоянный сигнал) – на рис. 14.32.
По схеме, приведенной на рис. 14.31, можно независимо настраивать коэффициент усиления и постоянную изодрома.
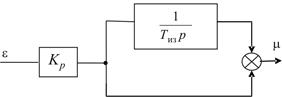
Рис. 14.31. Схема ПИ-регулятора
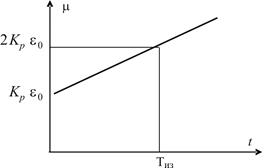
Рис. 14.32. Переходная характеристика ПИ-регулятора
В промышленных системах регулирующее звено и исполнительный механизм чаще всего объединяют в единое целое – промышленный регулятор со структурной схемой, представленной на рис. 14.33,

Рис. 14.33. ПИ-регулятор с ИМ постоянной скорости
с передаточной функцией  ,
,
где  .
.

Реализация форсирующего звена – сложная практическая задача, которую решают по схеме, представленной на рис. 14.34.
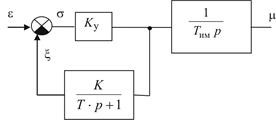
Рис. 14.34. ПИД-регулятор с ИМ постоянной скорости
Передаточная функция усилительного звена:
 .
.
Для получения промышленного ПИ-регулятора с передаточной функцией необходимо равенство
Отсюда 
 .
.
Если выбрать  , то
, то  .
.
Получаем реальный ПИ-регулятор с фильтрующей апериодической постоянной 
|
|
|
Подобным же образом реализуется промышленный регулятор при импульсном ПИ-регуляторе с ИМ постоянной скорости (рис. 14.35).
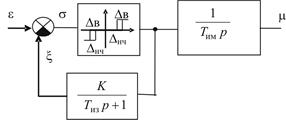
Рис. 14.35. Реализация ПИ-регулятора с ИМ постоянной скорости
Переходные процессы в такой структуре представлены на рис. 14.36.
В начале переходного процесса s = e0 – x > Dнч – реле включается, x увеличивается по экспоненте к величине kz. В момент равенства e0 – x = Dнч – Dв – реле отключается, x уменьшается по такой же экспоненте к нулю. При e0 – x = Dнч реле снова включается.
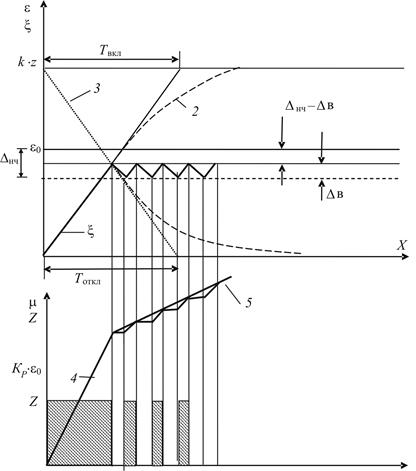
Рис. 14.36. Переходные процессы выходного сигнала
ПИ-регулятора с ИМ постоянной скорости: 1 – рассогласование e(t);
2 – x = f (t) при нарастании (реле включено); 3 – x = f (t) при снижении
(реле отключено); 4 – реальное изменение m = f (t);
5 – линеаризованное изменение m = f (t)
Автоколебательный процесс релейного усилителя будет продолжаться до момента, когда рассогласование e0 будет стремиться к нулю. Сигнал на выходе ИМ (перемещение) с достаточной степенью точности соответствует выходному напряжению линейного
ПИ-регулятора.
В промышленных регуляторах нередко настраивают различные постоянные времени Т вкл и Т откл апериодического звена (см. рис. 14.36).
При первом отключении  – параметр настройки регулятора, называемый скоростью связи. Приближенно время первого включения
– параметр настройки регулятора, называемый скоростью связи. Приближенно время первого включения  .
.
Переходные процессы по x при первом включении (x(0) = 0) описываются формулами
 .
.
В автоколебательном режиме время импульса

Переходные процессы по x при первом включении (x(0) = 0) описываются формулами
В автоколебательном режиме время импульса
Учитывая, что в автоколебательном режиме при пульсациях на малую величину Dв можно принять e» xвкл»xотк,
 .
.
Переходные процессы по x при отключении (x(0) = k ·  ) описываются формулами
) описываются формулами
 ,
,
 ,
,
Скважность импульсов
 ,
,
где  .
.
Учитывая, что для ИМ  , имеем
, имеем
или

Т вкл» Т откл, В» 0, таким образом, имеем ПИ-регулятор.
где  , Т из = Т откл.
, Т из = Т откл.
Линеаризированная кривая 5 выхода ПИ-регулятора при e = e0 описывается уравнением
При расчете ПИ-регулятора:
1) известно Т им, Z, S, K p, Т из;
2) определено Т откл = Т из;
3) рассчитывается  ;
;
4) рассчитывается  .
.
Практическая реализация ПИД-регулятора выполняется по схеме, приведенной на рис. 14.37.
|
|
|
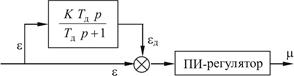
Рис. 14.37. Реализация ПИД-регулятора
Передаточная функция регулятора в этом случае
 .
.
Если Т д » Т 1, K д > 1, имеем реальный ПИД-регулятор.
 .
.
ЛАЧХ ПИД-регулятора представлена на рис. 14.38.
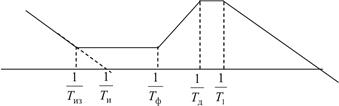
Рис. 14.38. ЛАЧХ ПИД-регулятора
Реализация ПИ- и ПИД-регуляторов многообразна и приводится в технических описаниях промышленных регуляторов[4].
Технически оптимальная настройка регуляторов
Для определения оптимальных параметров настройки регуляторов (параметрической оптимизации) АСР необходимо иметь сведения о статических и динамических характеристиках объекта регулирования и действующих возмущений. Наиболее достоверными являются экспериментально определенные статические характеристики.
Оптимальная настройка ПИД-регулятора позволяет максимально быстро и почти без перерегулирования вывести объект на уставку. Признак правильной настройки – плавный, без рывков, рост регулируемого параметра и наличие тормозящих импульсов при подходе к уставке как снизу, так и сверху (рис. 14.39).
Если объект выходит на уставку с небольшим перерегулированием и быстрозатухающими колебаниями, можно немного уменьшить коэффициент усиления, оставив все остальные параметры без изменения.
Величина максимума амплитудно-частотной характеристики замкнутой системы регулирования, а также ее резонансная частота могут быть определены из временной характеристики системы относительно управляющего воздействия по условной величине ее степени затухания  и частоте
и частоте  (рис. 14.40).
(рис. 14.40).
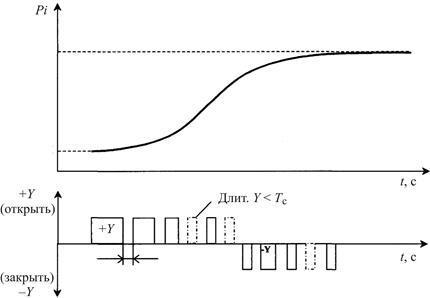
Рис. 14.39. Оптимальная работа ПИД-регулятора
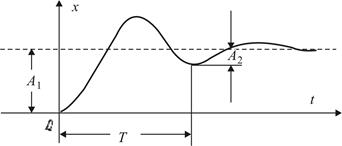
Рис. 14.40. Переходная характеристика
замкнутой системы регулирования
Указанное обстоятельство позволяет приближенно определить параметры регулируемого объекта  и
и  по полученной экспериментально кривой переходного процесса при ступенчатом воздействии со стороны задатчика регулятора. Действительно, если известны степень затухания переходного процесса и его частота, а также числовые значения параметров настройки регулятора, при которых регистрировался этот процесс, то принципиально не представляет труда определить, каковы должны быть числовые значения параметров объекта и для того, чтобы амплитудно-фазовая характеристика разомкнутой системы с известными параметрами настройки регулятора касалась окружности с индексом, соответствующим этой степени затухания при частоте, соответствующей частоте переходного процесса.
по полученной экспериментально кривой переходного процесса при ступенчатом воздействии со стороны задатчика регулятора. Действительно, если известны степень затухания переходного процесса и его частота, а также числовые значения параметров настройки регулятора, при которых регистрировался этот процесс, то принципиально не представляет труда определить, каковы должны быть числовые значения параметров объекта и для того, чтобы амплитудно-фазовая характеристика разомкнутой системы с известными параметрами настройки регулятора касалась окружности с индексом, соответствующим этой степени затухания при частоте, соответствующей частоте переходного процесса.
|
|
|
Порядок определения оптимальной настройки ПИ-регулятора по графику временной характеристики замкнутой системы регулирования с помощью графиков заключается в следующем:
1. Система регулирования при произвольной настройке регулятора включается в работу. Убедившись, чтоона работает устойчиво, быстро изменяют задание регулятору на некоторую достаточно большую, но допустимую по условиям эксплуатации величину и регистрируют процесс изменения регулируемой величины во времени.
2. Из полученного графика изменения регулируемой величины, типовой вид которого приведен на рис. 14.40, определяются степень затухания  и период колебаний переходного процесса Т.
и период колебаний переходного процесса Т.
3. Вычислив величину отношения периода колебаний переходного процесса к установленному в регуляторе во время проведения эксперимента значению времени изодрома, находят величины поправочных множителей на величину коэффициента передачи регулятора и на величину его времени изодрома, т.е. определяют, во сколько раз следует изменить числовые значения параметров настройки регулятора, чтобы настройка оказалась близкой к оптимальной.
4. Установив найденные параметры настройки в регуляторе, опыт повторяют и производят повторный расчет, аналогичный изложенному выше. Если окажется, что числовые значения поправочных коэффициентов близки к единице (находятся в пределах 0,95–1,05), можно считать, что настройка окончена. В противном случае необходимо произвести повторную перенастройку.
В практике наладочных работ используют приближенные формулы для определения оптимальных параметров настройки регуляторов для объектов, описываемых нижеприведенными выражениями при различных критериях оптимальности.
1. Всесоюзным теплотехническим институтом имени Ф.Э. Дзержинского (ВТИ) рекомендуются для степени затухания за период y = 0,75 и интегральной квадратичной оценки, близкой к минимуму, следующие формулы расчета для параметров ПИ-регулятора с передаточной функцией:
W (P) = K p(Т из Р + 1)/ Т из Р.
При 0 < tоб/ Т а < 0,2
 , Т из = 3,3tоб.
, Т из = 3,3tоб.
При 0,2 < tоб/ Т а < 1,5
 , Т из = 0,8 Та.
, Т из = 0,8 Та.
При y = 0,9, 0 < tоб/ Т а < 0,1
 , Т из= 5tоб.
, Т из= 5tоб.
При 0,1 < tоб/ Т а < 0,64
 , Т из = 0,5 Та.
, Т из = 0,5 Та.
2. Имеются номограммы для подобных объектов, чтобы в зависимости от параметров объекта и заданного затухания определить Kр, Т из (метод Ротача).
3. Существует метод компенсации большой постоянной времени объекта (Т из = Т об) при коэффициенте демпфирования x = 707 (модульный оптимум).
4. Аналитический расчет границы устойчивости и параметров регулятора при заданной степени колебательности по расширенным частотным характеристикам (метод Стефани) также применяется при наличии ЭВМ и соответствующих методик расчета. Все методики дают близкие результаты расчета параметров регулятора и, соответственно, близкие переходные процессы.
5. На практике расчеты регуляторов заканчиваются наладочными работами, когда используются экспериментальные методы параметрической оптимизации.
Эти методы основаны на прямом контроле переходных или частотных характеристик в процессе подбора оптимальных параметров настройки или с параметрами, заведомо обеспечивающими устойчивое движение АСР. Затем, вводя возмущение, наблюдают реакцию системы на эти возмущения. Целенаправленно изменяя параметры настройки регулятора, добиваются нужного характера переходного процесса. Это многошаговая итерационная процедура. Данные методы разработаны настолько, что позволяют автоматизировать этот процесс при минимальном участии человека[5].
Самая простая настройка, когда в замкнутой АСР с ПИ-регулятором (при ПИ-регуляторе Т из устанавливают очень большим) увеличивают Kp до границы устойчивости, определяют K p.кр и Т пер.кр – период установившихся колебаний. Затем выставляют параметры:
Для П-регулятора K p.опт = 0,5 5 K p.кр;
Для ПИ-регулятора K p.опт = 0,55 K p.кр, Т из = 1,25 Т пер.кр.
6. Лучшие результаты дает пошаговая оптимизация с оценкой переходной характеристики на каждом шаге.
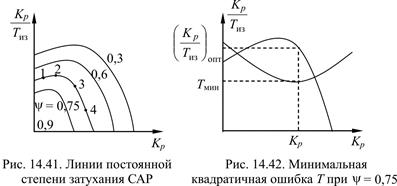
В плоскости параметров настройки ПИ-регулятора существуют линии одинаковой степени затухания y (рис. 14.41).
Одно и то же затухание (пусть ψ = 0,75) можно получить при различных параметрах регулятора. Нужно обеспечить при этом минимальную квадратичную ошибку, которая изменяется в плоскости как показано на рис. 14.42. Таким образом, надо искать оптимальную точку настройки.
Из кривых (рис. 14.43) для различных настроек можно видеть, что в точках 1 и 2 переходные процессы затянуты, в точке 4 имеется апериодическая составляющая, затягивающая процесс. Поиск оптимальной настройки состоит из следующих этапов (рис. 14.44, 14.45):
1. Завышают Т из, занижают Kр (точка 1).
2. Увеличивают Kр, чтобы при колебательном процессе ψ = 0,8–0,9 (точка 2).
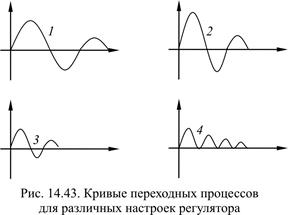
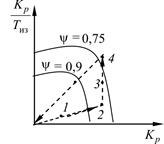
Рис. 14.44. Этапы практической настройки
параметров ПИ-регулятора
3. Уменьшают Т из, чтобы избавиться от апериодической составляющей (точки 3, 4).
4. Уменьшают Kр, чтобы при ψ = 0,95…1 и при различных вариациях динамических свойств объекта регулирования переходные процессы были слабоколебательными (точка 5).
Данный метод оптимизации не требует точного определения параметров объекта и параметров регулятора, так как варьирование параметров настройки производят относительно исходных значений, поэтому он широко применяется.
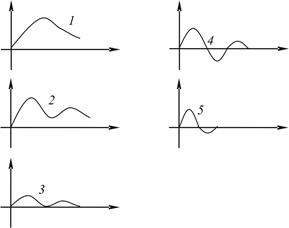
Рис. 14.45. Характер переходных процессов
при различных настройках параметров
регуляторов
К примеру, в инструкции для наладчика САР с цифровым ПИ-регулятором даны следующие рекомендации.
¨ регулятор настроен на ПИ-регулирование;
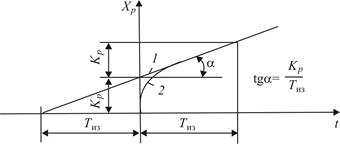
Рис. 14.46. Переходный процесс выходного сигнала
ПИ-регулятора
¨ структурная схема управления приведена на рис. 14.47;
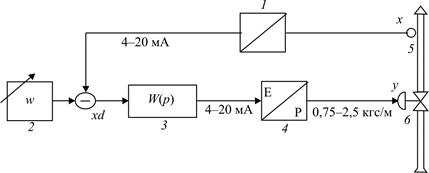
Рис. 14.47. Структурная схема управления объектом
с пневматическим исполнительным механизмом: w – задающее
воздействие; x – регулируемая величина; xd – отклонение
регулируемой величины; y – управляющее воздействие;
1 – измерительный преобразователь; 2 – задатчик величины;
3 – регулировочный усилитель; 4 – электропневматический
преобразователь сигнала; 5 – датчик; 6 – пневматический
исполнительный блок
¨ 
¨ ручная установка параметров регуляторов без знания характеристики объекта. Параметры регуляторов для оптимальной регулировки оборудования в этом случае еще не известны. Для удержания регулирующего контура в стабильном состоянии имеются следующие заводские установки ПИ-регулятора:
– пропорциональный коэффициент Kр = 0,1;
– время изодрома Tn = 9984 с;
– время предварения Tv = oFF;
– настройка параметров ПИ-регулятора:
установить желаемую заданную величину и в ручном режиме установить рассогласование регулирования на ноль;
переключиться на автоматический режим;
медленно увеличивать Kр, пока регулирующий контур через малые изменения заданной величины не начнет клониться к колебаниям;
незначительно уменьшать Kр, пока колебания не будут устранены;
уменьшать Tn до тех пор, пока регулирующий контур снова не начнет клониться к колебаниям;
медленно увеличивать Tn до тех пор, пока уклон к колебаниям не будет устранен.
15. Автоматизация турбомеханизмов
и энергосбережение
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 2716; Нарушение авторских прав?; Мы поможем в написании вашей работы!