КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Линейный взвешенный сумматор
|
|
|
|
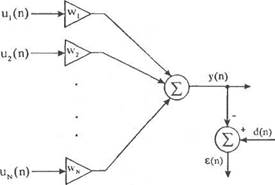
На рис. 2.7. представлена структура линейного взвешенного сумматора (linear combiner)11. Его выход образуется сигналом у(п), который представляет собой линейную комбинацию всех входов и^(п), и2(п), и^п), n = 1, 2,.... Введем обозначение
и(п) = [^(л), и2(п),.... и^п)]Т. (2.22)
Конкретные компоненты вектора и(п) умножаются на компоненты вектора весов
w=[wvw2............. wN]T. (2.23)
В результате выходной сигнал линейного взвешенного сумматора описывается формулой
м
y{n)=^wkuk(n) =wTu(n). (2.24)
Выход линейного взвешенного сумматора у(п) будет использоваться в качестве реализации некоторого сигнала d(n), называемого эталонным или заданным сигналом. В результате сравнения реализации у(п) с сигналом d(n) получаем погрешность реализации
| (2.25) |
| Рис. 2.7. Линейный взвешенный сумматор. |
| Здесь и далее для удобства читателей и следуя польскому изданию в скобках иногда указывается английское название термина. - Прим. перев. |
(n) = d(n)~y(n).
Веса линейного взвешенного сумматора wv w2...... wN будут подби
раться так, чтобы минимизировать меру погрешности
Q(w) = Е\(п)2] = £
= E[(d(n) - wTu(n)f]. (2.26)
Предположим, что входной сигнал и(п) и эталонный сигнал d(n) -это реализации дискретных стохастических процессов {и(п)} и {d(n)}, совместно стационарных в широком смысле, т.е.
1) {и(п)} - стационарный в широком смысле стохастический процесс;
2) {d(n)} - стационарный в широком смысле стохастический процесс;
3) функция взаимной корреляции процессов {и(п)} и {d(n - к)} зави
сит только от значения к.
Мера погрешности (2.26) называется среднеквадратичной по
грешностью реализации. Обозначим [w\ w'N]T - w" вектор весов, ми
нимизирующих погрешность (2.26). Представленная на рис. 2.7 система,
веса которой принимают значения w\...... w"N, называется пространст
венным фильтром Винера (spatial filter). Процесс фильтрации заключает
ся в умножении входов и^(п),..., uN(n) на соответствующее им множество
весов w\,..., w*N с последующим суммированием отдельных произведений
для получения реализации у(п) эталонного сигнала d(n). Покажем, что
среднеквадратичная погрешность реализации (2.26) - это функция вто
рого порядка вектора весов iv.
|
|
|
Поскольку
[d(n) - wTu(n)]2 = d2(n) - 2d(n)wTu(n) + wTu(n)uT(n)w, (2.27) то формула (2.26) принимает вид
Q(iv) = E[cf2(n)] - 2wTE[d(n)u(n)] + wTE\u(n)uT(n)] w. (2.28)
В последнем слагаемом выражения (2.28) можно выделить матрицу автокорреляции компонентов входного вектора
| E[U)(n)uN(n)] E[u2(n)uN(n)) |
R = Е[и(п)иТ(п)] -
Е[и,(п)и2(п)] Е[и2(п)щ(п)] Е[(и22(п))}
(2.29)
E[uN(n)u,(n)} E[uN(n)u2(n)] - E[(u2N(n))] а также вектор взаимной корреляции между сигналами d(n) и у(п)
E[d(n)u4n)Y
| (2.30) |
| р = E[d(n)u(n)] = |
E[d(n)u2(n)] E[d(n)uN(n)]
Глава 2. Многослойные нейронные сети и алгоритмы их обучения
2.4. Системы типа Адалайн
 С использованием обозначений (2.29) и (2.30) среднеквадратичная погрешность реализации (2.28) может быть записана в виде
С использованием обозначений (2.29) и (2.30) среднеквадратичная погрешность реализации (2.28) может быть записана в виде
| (2.31) |
Q(w) = E[d2(n)] - 2wTp + ivrRiv.
Из выражения (2.31) следует, что среднеквадратичная погрешность реализации Q(iv) - это функция второго порядка вектора весов iv. С геометрической точки зрения Q(w) представляется гиперпараболоидом, имеющим единственный глобальный экстремум Q*. Этот гиперпараболоид называется поверхностью среднеквадратичной погрешности. Рис. 2.8 представляет фрагмент типовой поверхности среднеквадратичной погрешности для N - 2 (в этом случае это параболоид).
Поверхность среднеквадратичной погрешности, описываемая
уравнением (2.31), имеет единственный глобальный экстремум Q*, дости
гаемый при оптимальных значениях весов w\...... w*N. Вычисление опти
мальных значений весов сводится к определению вектора градиента
V функции Q(iv) и приравниванию полученного результата к нулю:
| dQ |
| V=- |
|
|
|
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1095; Нарушение авторских прав?; Мы поможем в написании вашей работы!