КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Шаг 5. Дефуззификация
|
|
|
|
| М2 М, S D, D2 |
| Рис. 3.38. Форма базы нечетких правил. |
Наша задача заключается в определении с помощью базы правил отображения f: (х-,, х2) -» у, где у - выходная величина нечеткой системы. При определении количественного значения управляющего воздействия у для данных входных сигналов (х.,, х2) необходимо выполнять операцию дефуз-
| ЛЮ- |
зификации. Вначале для входных сигналов (х-|, х2) с использованием операции произведения объединим посылки (условия) /с-ro нечеткого правила. Таким образом определяется так называемая степень активности /с-го правила. Ее значение рассчитывается по формуле
(3.285)
Например, для первого правила R(1) степень активности определяется выражением
т(1) =№,(*);*„, (х2)■ (3.286)
Для расчета выходного значения у воспользуемся способом де-фуззификации по среднему центру (3.269)
(3.287)
Лк)
Глава 3. Нечеткие множества и нечеткий вывод


 Разделить пространства значений х„ Х2 и с/на области. Создать соответствующие им функции принадлежности
Разделить пространства значений х„ Х2 и с/на области. Создать соответствующие им функции принадлежности
Создать таблицу BR для записи базы правил
и таблицу Т степеней истинности правил;
заполнить эти таблицы нулями

 /Выбрать очередную пару данных (х,(/), х2(/); d(f))/
/Выбрать очередную пару данных (х,(/), х2(/); d(f))/
| Л | |
| Установить степени принадлежности данных к областям (нечетким множествам) и сформировать соответствующее правило R: IF х, это A, AND x2 это А2 THEN у это В. | |
| i | |
| Установить степень истинности правила R по формуле: sp(R) = M*.)>M*2),Mb(>') |
| <(если SP(R)>T | |||
| ,ДА | |||
| Вписать правило R в таблицы BR и Т: BR [Д, AJ =В и Т[Д, A3 = SP(R) | |||
| t | |||
| /=/ +1 |
| С |
| Рассмотрены все пары данных (/ > л)? у |
НЕТ
|
|
|
ДА

 Рис. 3.39. Блок-схема построения базы правил на основе численных данных.
Рис. 3.39. Блок-схема построения базы правил на основе численных данных.
3. 10. Проектирование базы нечетких правил на основе численных данных 115
 Рассмотренный метод легко можно обобщить на случай нечеткой системы с любым числом входов и выходов. На рис. 3.39 представлен алгоритм построения базы правил в виде блок-схемы, которая может служить основой для подготовки соответствующей программной реализации. 3.10.2. Задача парковки грузовика
Рассмотренный метод легко можно обобщить на случай нечеткой системы с любым числом входов и выходов. На рис. 3.39 представлен алгоритм построения базы правил в виде блок-схемы, которая может служить основой для подготовки соответствующей программной реализации. 3.10.2. Задача парковки грузовика
Парковка грузовика к рампе (платформе) представляет собой нетривиальную проблему. Строго говоря, это задача нелинейного управления, для которой неприменимы традиционные методы построения модуля выработки решения. Пример такого модуля, представленного в виде нейронной сети, был предложен Нгуеном и Видроу в работе [24], тогда как Конг и Коско в статье [18] представили стратегию нечеткого управления.
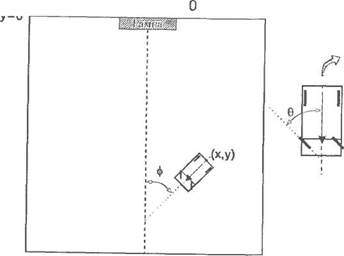
Проблема парковки грузовика. Грузовик и зона его «паркинга» показаны на рис. 3.40 (сравни с [24] и [18]). Пунктирной линией обозначена ось у. Рампа, к которой должен подъехать грузовик, помечена словом «док». Грузовик представлен вектором, направленным от задней части грузовика к передней. Положение грузовика точно определяется значениями трех переменных: х - координатой по горизонтальной оси, у -координатой по вертикальной оси, и углом ф, под которым грузовик (точнее, вектор его перемещения) находится относительно оси у; координаты (х, у) определяют центр задней части грузовика (паркование в док осуществляется задним ходом).
Грузовик движется задним ходом с постоянной скоростью (в задаче допускается только такой вид перемещения). В качестве параметра управления выступает угол поворота колес грузовика в. Задача формирования управляющего воздействия заключается в генерации таких углов поворота передних колес грузовика, чтобы припарковать его задом к рампе.
|
|
|
Рампа находится в точке с координатами х = 0 и у = 0. Область допустимых значений по оси х составляет от -150 до +150, а по оси у - от 0 до 300, что и определяет зону «паркинга». Угол ф может изменяться в пределах от -180° до +180°, при этом ф = 0 означает, что грузовик расположен параллельно оси у задней частью к оси х. В качестве входных сигналов модуля управления выступают ф е [-180°, +180°] и х е [-150, +150], а в качестве выходного сигнала - в е [-45°, +45°]. На выходе модуля управления могут появляться значения в пределах от -180° до +180°, однако с учетом очевидных ограничений допустимый интервал сокращен до [-45°, +45°].
1. Старт
2. Разделить пространства определения х^ х2 и d на области. Со
здать соответствующие им функции принадлежности.
3. Создать таблицу BR для записи базы правил и таблицу Т степе
ни истинности правил; заполнить таблицу Т нулями. Т[А|, А£ = 0
4. / = 1
5. Выбрать одну пару данных (х-|(/), х2(/) и d(i)).
Глава 3. Нечеткие множества и нечеткий вывод
3.10. Проектирование базы нечетких правил на основе численных данных 117

|
| хк=О,фк = |
| у=300 |
| х=150 |
х=-150 х = 0
Рис. 3.40. Грузовик и зона паркинга.
6. Определить степень принадлежности данных к областям (нечет
ких множеств) и создать соответствующее правило R: IF x1 это А1 AND
х2 это А2 THEN у это В.
7. Определить степень истинности правила R по формуле
SP(R)= Мд(х1)-АгЛ2(х2)-^е(У).
8. SP(R)>T[A,,AJ?
9. Вписать правило R в таблицу BR. BRf^, А2]= в и "ПА|, >У= SP(R)
10.; = /+1
11. Просмотрены все пары данных (;> п)?
12. Стоп
Задача модуля управления заключается в подборе такого угла поворота колес, который приведет приведет грузовик в точку парковки, расположенную в центре рампы, т.е. имеющую координаты х^ = 0, ук = 0 и фк = 0°. Для упрощения примем, что положение грузовика относительно оси у не рассматривается в качестве входного сигнала. Поэтому если грузовик попадет на ось у, а вектор его направления будет параллелен этой оси, то моделирование может быть завершено. Моделирование также прекращается в случае, когда грузовик выезжает за зону «паркинга».
Генерация обучающей последовательности (х(/), $('), 6(1)). Выполним эту процедуру методом «проб и ошибок»: для каждого положения
грузовика (данные х и ф) определяем управляющее воздействие (угол поворота колес грузовика в) на основании собственных знаний о том, насколько следует повернуть колеса в такой ситуации. После нескольких попыток, как правило, удается выбрать комбинацию данных, соответствующую наиболее «гладкой» и удачной траектории движения.
|
|
|
Для генерации обучающих данных использовались шестнадцать начальных положений грузовика:
(хО, фО) = (-100, -90°), (-100, 0°), (-100, 90°), (-100, 180°), (-50, -90°), (-50, 0°), (-50, 90°), (-50, 180°), (50, -90°), (50, 0°), (50, 90°), (50, 180°), (100, -90°), (100, 0°), (100, 90°), (100, 180°).
Для моделирования необходимы уравнения, описывающие динамику перемещения грузовика. Будем использовать следующую (приближенную) модель:
| (3.289) (3.290) |
x{t + 1) = х(0 + sin[(0 + (0] - sin[(Q] cos[(Q], (3.288)
y(t + 1) = Yd) - cos[(0 + (01 - sin[(Q] sin[(f)],
J
где b - это длина грузовика. Для моделирования примем, что Ь = 20 м. Следует отметить, что даже упрощенная модель динамики грузовика оказывается нелинейной. Данные готовились следующим образом: для начального положения грузовика угол поворота колес (управляющее воздействие) выбирался исходя из собственного опыта. Очередное положение рассчитывалось с применением уравнений (3.288 - 3.290). Примерная последовательность позиций, занимаемых грузовиком, и соответствующие им значения управляющего сигнала приведены в таблице 3.1. Для простоты такую последовательность будем называть траекторией.
Результаты моделирования. Для формирования нечетких правил управления в задаче парковки грузовика применялась пятишаговая процедура, описанная в п. 3.10.1. Были использованы шестнадцать сгенерированных последовательностей групп данных (х, ф; в) и функции принадлежности, представленные на рис. 3.41. Правила, сформированные на основе сгенерированных групп обучающих данных и соответствующих им степеней истинности, приведены в табл. 3.6. В нее включены только те правила, которые сформированы по данным из табл. 3.7.
Распределение обучающих данных и окончательная структура сформированной по ним базы правил изображены на рис. 3.42. Можно заметить, что из-за отсутствия необходимых данных для некоторых диапазонов х и f правила не были созданы. Из этого следует, что шестнадцать заданных траекторий не покрывают все возможные случаи. Тем не менее, далее будет показано, что сформированные правила оказываются достаточными для корректного управления грузовиком. Результирующее моделирование парковки грузовика проводилось для трех начальных позиций: (хО, ф0) - (-100, -60°), (0, 180°) и (100, -120°). Траектории движения грузовика показаны на рис. 3.43.
|
|
|
| M, S D, D2 |
 а 3 Нечеткие множества и нечеткий вывод
а 3 Нечеткие множества и нечеткий вывод
| a b с | ||
| A | -150-150 -45 | |
| / | \ m, | -90 -30 0 |
| / | \ S | -30 0 30 |
| / | 0 30 90 | |
| / ■ \ D2 | 45 150 150 | |
| a b с | ||
| a b с | ||
| M | -205 -135 -90 | |
| M2 | -135 -90 -30 | |
| M, | -90 -30 0 | |
| s | -15 0 15 | |
| D, | 0 30 90 | |
| 30 90 135 | ||
| 3 | 90 135 205 a b с | |
| M3 | -45,0 -45,0 -15,0 | |
| M2 | -45,0 -15,0 -7,5 | |
| M, | -15,0 -7,5 0,0 | |
| s | -7,5 0,0 7,5 | |
| D, | 0,0 7,5 15,0 | |
| D2 | 7,5 15,0 45,0 | |
| 15.0 45.0 45,0 |
Рис. 3.41. Функции принадлежности для задачи парковки грузовика.
Процесс формирования правил в соответствии с предложенным алгоритмом в значительной степени зависит от размещения функций принадлежности нечетких множеств. При проведении имитационных экспериментов рассматривались различные варианты этих функций, и каждый раз получалась другая база правил с другим качеством управления. Подбор наилучшего размещения функций принадлежности представляет собой самостоятельную проблему, которая в настоящей работе не рассматривается.
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 387; Нарушение авторских прав?; Мы поможем в написании вашей работы!