КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
З наведених структурних схем визначити блок схему автоматичного керування по збуренню 2 страница
119. Від якої фізичної величини походить зміна опору в тензометричному перетворювачі?
від швидкості;
від температури;
+ від деформації;
від тиску
120. Індуктивний датчик спрацьовує на:
+ металеві деталі;
не металеві деталі;
на зміну ємності
на зміну індуктивності
121. Ємнісні датчики спрацьовують на:
металеві деталі;
не металеві деталі;
+ на зміну ємності;
на зміну індуктивності
122. Конструктивно-індуктивний датчик – це:
плоский конденсатор.
+ перетворювач, в якому зміна магнітного опору магнітопроводу відбувається шляхом зміни довжини повітряного зазору.
перетворювач, в якому під час руху провідника в магнітному полі індукується е.р.с.
123. На якому з рисунків стабілітрон включений у режимі стабілізації?
| на рис. 1; +на рис. 2; на рис. 3; на всіх рис.; на жодному з рис.; | 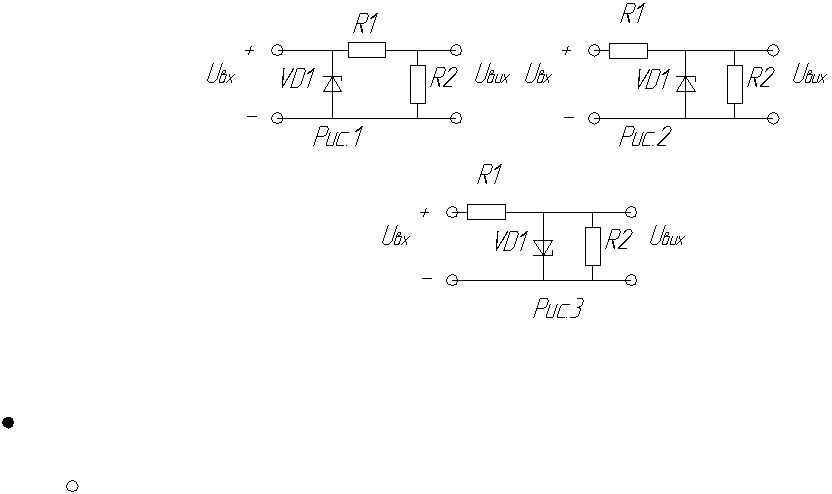
|
124. Виконавчим органом у системі автоматичного керування може бути:
індуктивний датчик;
підсилювач кінцевий;
шляховий вимикач;
+ електромагнітний пускач;
125. На якому рисунку дана схема логічного елемента АБО?
| на 1; на 2; + на 3; на 4 | 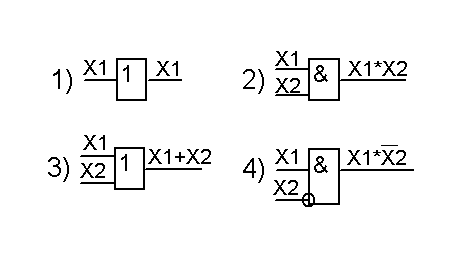
|
126. Який з датчиків є датчиком активного опору?
+ датчики температури;
датчики індуктивності і ємності;
електромагнітні датчики;
генераторні датчики;
127. Який з датчиків є датчиком переміщень безперервної дії?
терморезистор;
тензорезистор;
+ потенціометр;
фоторезистор;
фототранзистор;
128. До якої частини автоматичної системи керування належить підсилювач?
вхідної;
+ керуючої;
програмної;
вихідної;
129. Підсилювачі використовують з метою:
підсилення рівня автоматизації с.-г. виробництва;
+ підсилення слабких сигналів;
зменшення дії підсилених сигналів;
розв’язання електричних кіл;
130. На який сигнал реагує фоторезистор?
температурний;
електричний;
+ світловий;
сигнал фотоапарата;
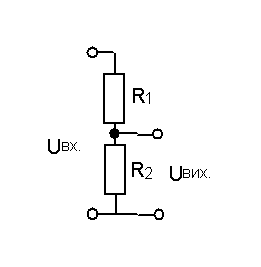
131. За якою формулою визначається вихідна напруга у подільнику напруг?
+  ; ;
 ; ;
 ; ;
 ; ;
 ; ;
| 
|
132. Схема якого автоматичного пристрою показана на рисунку?
| інвертованого підсилювача; + інвертованого суматора; інтегруючий підсилювач; диференціюючий підсилювач; | 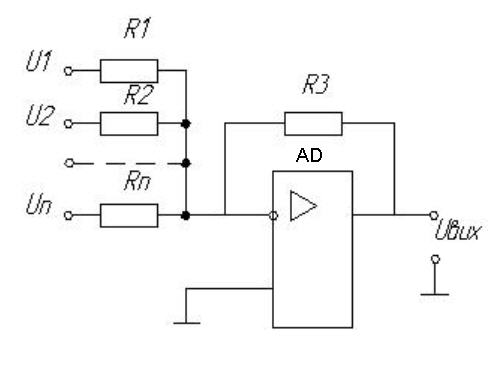
|
133. Яку функцію виконує логічний елемент?
| + АБО; НІ; І; АБО-НІ; | 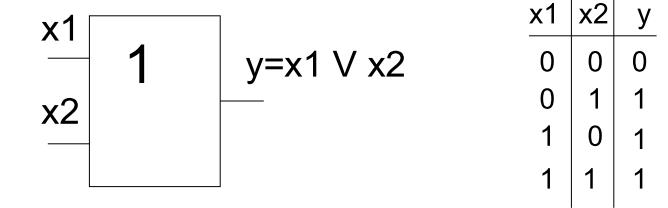
|
134. Яку функцію виконує логічний елемент?
| АБО; + НІ; І; АБО-НІ; | 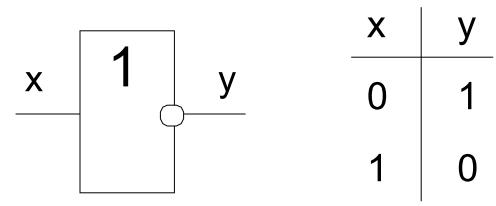
|
135. Яку функцію виконує логічний елемент?
| АБО; НІ; + І-НІ; АБО-НІ; | 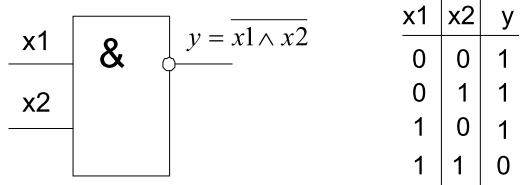
|
136. Яку функцію виконує логічний елемент?
| АБО; НІ; + І; АБО-НІ; | 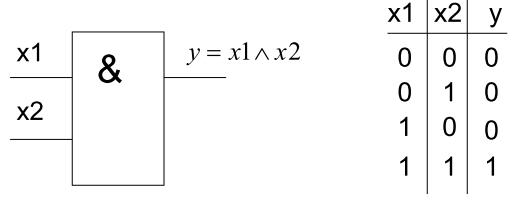
|
137. Яку функцію виконує логічний елемент?
| АБО; НІ; + виключне АБО; АБО-НІ; | 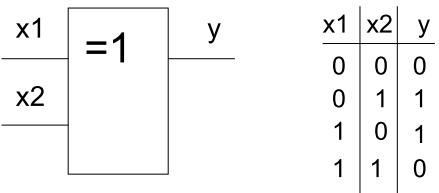
|
138. Яку функцію виконує наведена схема?
| АБО; + НІ; виключне АБО; АБО-НІ; | 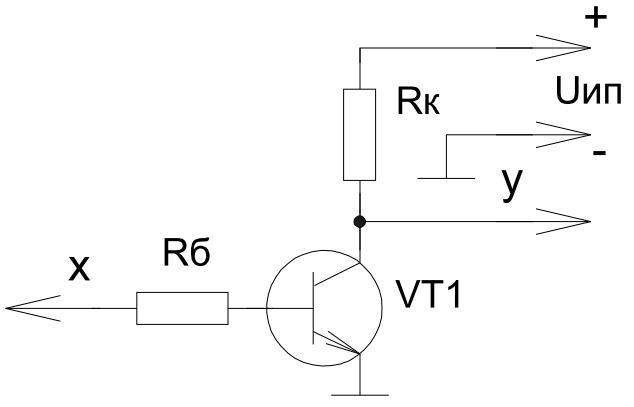
|
139. Які види електродвигунових виконавчих механізмів малої потужності набули найбільшого поширення?
трифазні з короткозамкнутим або фазним ротором;
+ двофазні асинхронні двигуни або двигуни постійного струму;
з поступальним переміщенням вихідного штока;
автомобільні.
140. Що розуміється під виразом «однообертові електродвигунові виконавчі механізми»?
електродвигуни з кутом повороту вихідного вала до 180°;
+ електродвигуни з кутом повороту вихідного вала до 360°;
вихідний вал електродвигуна може здійснювати велике число оборотів;
вихідний вал електродвигуна нерухомий.
141. Основна вимога до технічного пристрою з погляду державної системи приладів і засобів автоматизації:
низька вартість;
+стандартизація параметрів, які визначають його зв'язки з іншими пристроями;
мала металоємність;
немає жодної правильної відповіді.
142. Регулятори автоматичних систем – це:
сукупність технічних засобів для забезпечення найкращого регулювання в автоматичних системах;
+ автоматичні пристрої управління замкнутих систем, які призначені для формування регулюючої дії на об’єкт управління відповідно до реалізованого в них алгоритму управління;
сукупність технічних засобів для забезпечення найкращого регулювання в автоматичних системах з мінімальними затратами коштів;
немає жодної правильної відповіді.
143. Функціонально необхідним елементом будь-якого регулятора є:
мікропроцесорний пристрій, який виконує алгоритм регулювання;
підсилювальний пристрій, який виконує алгоритм регулювання;
+ вимірювальний пристрій, який здійснює формування сигналу управління пропорційно відхиленню ΔХ;
немає жодної правильної відповіді.
144. Алгоритм роботи будь-якого регулятора це:
+ сукупність математичних перетворень, які виконує регулятор над вхідним сигналом ΔХ при формуванні управляючої дії U;
програма для мікропроцесорного пристрою, який виконує алгоритм регулювання;
порядок команд регулятору, який виконує алгоритм регулювання;
не має жодної правильної відповіді;
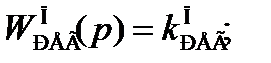
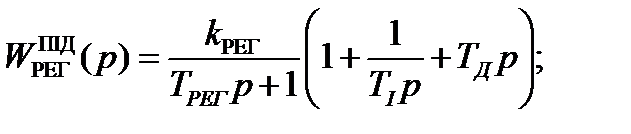
145. Передатна функція П - регулятора має вигляд:
+ 

146. Передатна функція І - регулятора має вигляд:

+
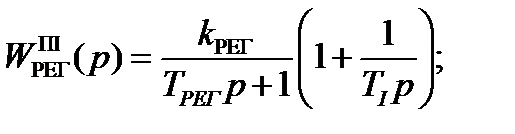
147. Передатна функція ПІ - регулятора має вигляд:
+
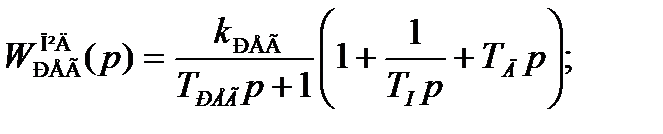
148. Передатна функція ПІД - регулятора має вигляд:
+ 
149. Резонансні рівнеміри застосовуються для:
+ визначення рівня сипучих матеріалів;
визначення настання резонансу струмів;
визначення настання резонансу напруг;
визначення видовження пружини
150. Статичну характеристику якого регулятора зображено на рисунку?
| однопозиційного; + двопозиційного; трипозиційного; чотирипозиційного. | 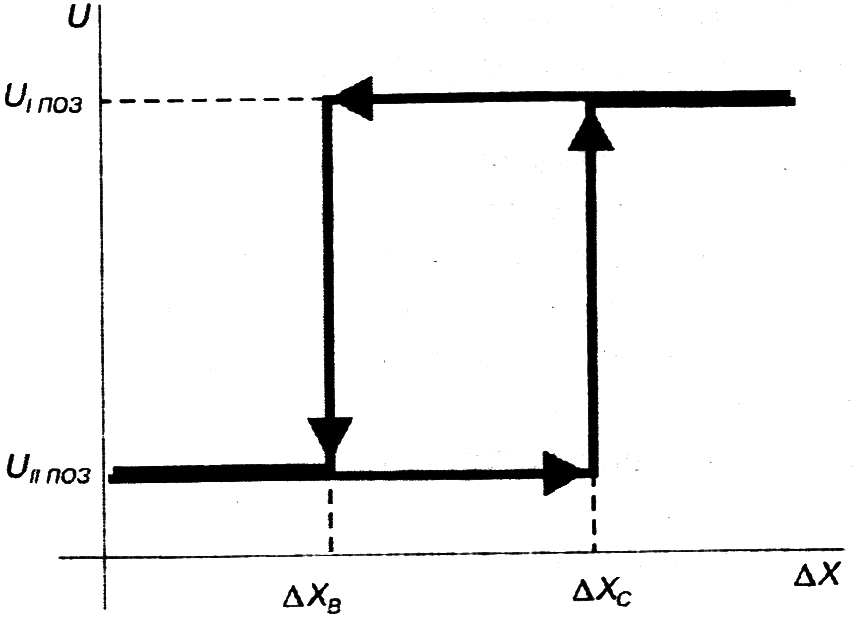
|
151. Статичну характеристику якого регулятора зображено на рисунку?
| однопозиційного; двопозиційного; + трипозиційного; чотирипозиційного. | 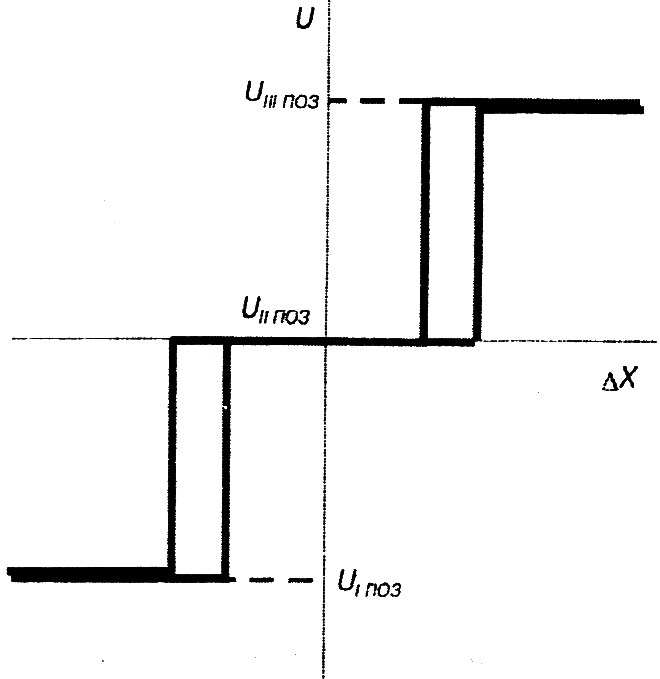
|
152. П -регулятори – це:
+ регулятори неперервної дії, які формують керуючу дію U пропорційно відхиленню ΔX;
регулятори, які формують керуючу дію U пропорційно інтегралу відхилення ΔX;
регулятори, які формують керуючу дію U, що включає в себе пропорційну і інтегральну складові;
регулятори, які формують керуючу дію U, що включає в себе пропорційну, інтегральну та диференціальну складові;
153. І - регулятори – це:
регулятори неперервної дії, які формують керуючу дію U пропорційно відхиленню ΔX;
+ регулятори, які формують керуючу дію U пропорційно інтегралу відхилення ΔX;
регулятори, які формують керуючу дію U, що включає в себе пропорційну і інтегральну складові;
регулятори, які формують керуючу дію U, що включає в себе пропорційну, інтегральну та диференціальну складові;
154. ПІ -регулятори – це:
регулятори неперервної дії, які формують керуючу дію U пропорційно відхиленню ΔX;
регулятори, які формують керуючу дію U пропорційно інтегралу відхилення ΔX;
+регулятори, які формують керуючу дію U, що включає в себе пропорційну і інтегральну складові;
регулятори, які формують керуючу дію U, що включає в себе пропорційну, інтегральну та диференціальну складові;
155. ПІД -регулятори – це:
регулятори неперервної дії, які формують керуючу дію U пропорційно відхиленню ΔX;
регулятори, які формують керуючу дію U пропорційно інтегралу відхилення ΔX;
регулятори, які формують керуючу дію U, що включає в себе пропорційну і інтегральну складові;
+ регулятори, які формують керуючу дію U, що включає в себе пропорційну, інтегральну та диференціальну складові;
156. Сигнали об'єкта керування за допомогою яких можна впливати на режим роботи об'єкта називаються
+ керувальні
вихідні
внутрішні
збурювальні
157. Сигнали, що відбивають випадкові впливи навколишнього середовища на об'єкт керування називають
керувальними
вимірюваними
внутрішніми
+ збурювальними
158. Лінійна система є повністю __________ тоді й тільки тоді, коли вона може бути переведена з будь-якого початкового стану x 0 у початковий момент часу t 0 в будь-який кінцевий стан x (t 1)= x 1 за кінцевий час t 0− t 1
слідкуючою
стійкою
перевідною
+ керованою
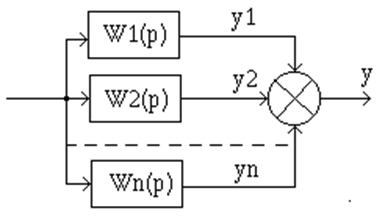
159. На схемі представлено з’єднання динамічних ланок яке називається
послідовне
+ паралельне
зустрічно-паралельне
змішане
160. Для зображеного на схемі паралельного з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
+ W(p)=W1(p)+W2(p)+…+Wn(p)
W(p)=W1(p)∙W2(p)∙…∙Wn(p)
W(p)=−W1(p)−W2(p)−…−Wn(p)
W(p)=W1(p)−W2(p)+…+Wn(p)
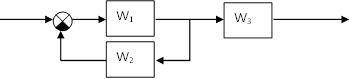
161. На схемі представлено з’єднання динамічних ланок, яке називається:

+послідовне
паралельне
зустрічно-паралельне
змішане
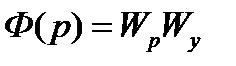
162. Для зображеного на схемі послідовного з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
W(p)=W1(p)+W2(p)+…+Wn(p)
+ W(p)=W1(p)∙W2(p)∙…∙Wn(p)
W(p)=−W1(p)−W2(p)−…−Wn(p)
W(p)=W1(p)−W2(p)+…+Wn(p)
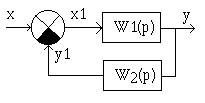
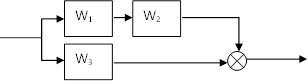
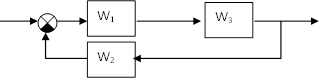
163. На схемі представлено з’єднання динамічних ланок
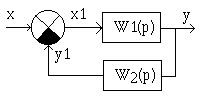
послідовне
паралельне
+зустрічно-паралельне
змішане
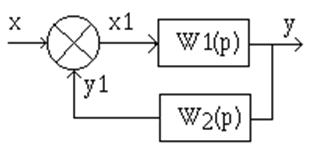
164. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена по формулі
W(p)=W1(p)+W2(p)
W(p)=W1(p)∙W2(p)
W(p)=W1(p)/(1-W1(p)W2(p))
+ W(p)=W1(p)/(1+W1(p)W2(p))
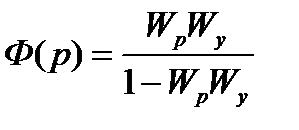
165. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
W(p)=W1(p)+W2(p)
W(p)=W1(p)∙W2(p)
+ W(p)=W1(p)/(1-W1(p)W2(p))
W(p)=W1(p)/(1+W1(p)W2(p))
166. Знайдіть відповідність між зображеними схемами з’єднання динамічних ланок та їх назвами:
паралельне
послідовне
зустрічно-паралельне
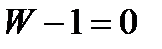
167. Під час переносу вузла через лінійну ланку А за ходом сигналу необхідно включити у відгалуження …
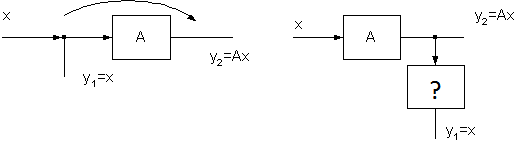
таку саму лінійну ланку А
протилежну лінійну ланку –А
одиничну ланку B=1
+ зворотну лінійну ланку А-1
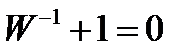
168. Під час переносу вузла через лінійну ланку А проти ходу сигналу необхідно ввімкнути у відгалуження …
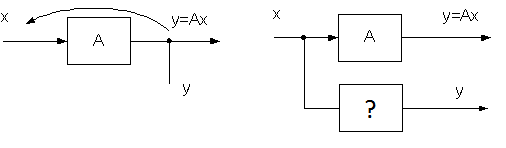
+ таку саму лінійну ланкуА
протилежну лінійну ланку –А
одиничну ланку B=1
зворотну лінійну ланку А-1
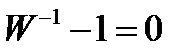
169. Під час переносу суматора через лінійну ланку А за ходом сигналу необхідно ввімкнути у відгалуження:
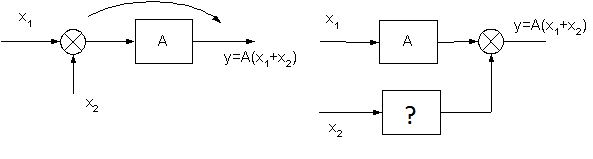
+ таку саму лінійну ланку А
протилежну лінійну ланку –А
ще один суматор
зворотну лінійну ланку А-1
170. Під час переносу суматора через лінійну ланку А проти ходу сигналу необхідно ввімкнути у відгалуження:
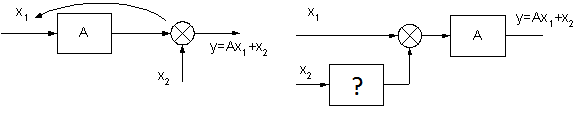
таку саму лінійну ланку А
протилежну лінійну ланку –А
ще один суматор
+ зворотну лінійну ланку А-1
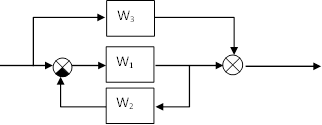
171. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:

W(p)=W1(p)∙W2(p)+W3(p)
W(p)=W3(p)/(1+W1(p)W2(p))
W(p)=W3(p)(1+W1(p)W2(p))
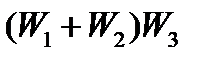
+ W(p)=(W1(p)+W2(p))∙W3(p)
172. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
+ W(p)=W1(p)∙W2(p)+W3(p)
W(p)=W3(p)/(1+W1(p)W2(p))
W(p)=W3(p)(1+W1(p)W2(p))
W(p)=(W1(p)+W2(p))∙W3(p)
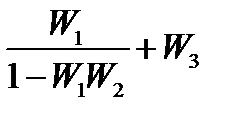
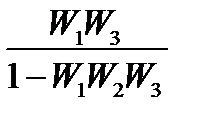
173. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:

+ 
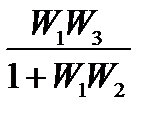
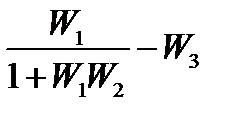
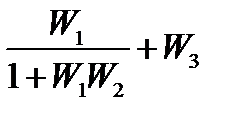
174. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
+
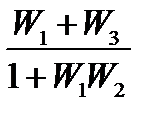
175. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
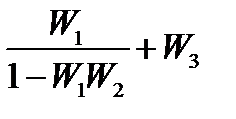
+ 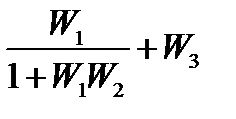
176. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
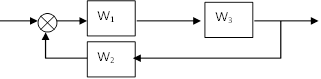
+ 

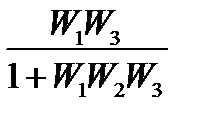
177. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
+
178. Зворотний зв’язок, який діє тільки в перехідних режимах називають
місцевий
жорсткий
+гнучкий
додатний
179. Якщо сигнал зворотного зв’язку існує як в усталеному, так і в перехідному режимах, то такий зворотний зв’язок називають
місцевий
+ жорсткий
гнучкий
додатний
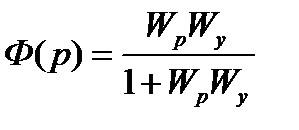
180. Для замкненої системи, яку зображено на рисунку передатна функція за сигналом керування  дорівнює
дорівнює

+ 

181. Для замкненої системи, яку зображено на рисунку передатна функція за помилкою 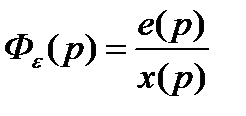 ,дорівнює:
,дорівнює:
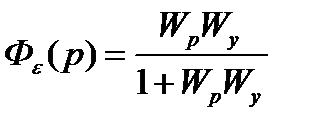
+ 
182. Для передатних функцій замкненої системи по керуванню Ф (p) та по помилці Ф ε(p) справедливе таке відношення
+ 
183. Якщо передатна функція розімкненої системи W, тоді характеристичне рівняння замкненої системи може бути записане:
+ 
184. Здатність системи повертатися до стану рівноваги після зняття збурення, що порушило цю рівновагу називається
+ стійкістю
непохитністю
жорсткістю
врівноваженістю
185. Система, яка беззупинно віддаляється від рівноважного стану або робить довколо нього коливання зі зростаючою амплітудою є …
неврівноваженою
+ нестійкою
гнучкою
віддаленою
186. Математичну теорію стійкості було розроблено вченим на прізвище:
Попов
+ Ляпунов
Максвел
Стодола
187. Характеристичним поліномом розімкненої системи є …
+ знаменник передатної функції розімкненої системи
чисельник передатної функції розімкненої системи
сума чисельника і знаменника передатної функції розімкненої системи
різниця чисельника і знаменника передатної функції розімкненої системи
188. Характеристичним поліномом замкненої системи є …
знаменник передатної функції розімкненої системи
чисельник передатної функції розімкненої системи
+ сума чисельника і знаменника передатної функції розімкненої системи
різниця чисельника і знаменника передатної функції розімкненої системи
189. Згідно з теорією стійкості, лінійна система буде стійкою, якщо корені її характеристичного рівняння …
+ лежать у лівій комплексній напівплощині
лежать у правій комплексній напівплощині
мають додатні дійсні частини
+мають від’ємні дійсні частини
190. Яка з перерахованих систем є стійкою, якщо характеристичні рівняння систем мають такі корені:
+ (-2; -0,5±j3; -0,01)
(-1; 0,7±j5; -0,09)
(3; ±j2; -0,5)
(-2; ±j3; -0,01)
191. Яка з перерахованих систем є нестійкою, якщо характеристичні рівняння систем мають такі корені
(-2; -0,5±j3; -0,01)
(-1; -0,7±j5; -0,09)
(-18; -100±j2; -0,5)
+ (-2; -20±j3; 0,01)
192. Для того, щоб система була стійкою необхідно, щоб всі коефіцієнти її характеристичного рівняння були …
за модулем більше одиниці
розташовані в лівой комплексній напівплощині
+ ненульові і одного знаку
кратними порядку системи
193. Межі стійкості на комплексній площині відповідають промені:
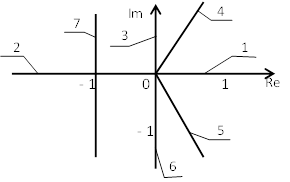
1, 2
2, 7
+ 3, 6
4, 5
194. Система, що має таке розташування коренів характеристичного рівняння:
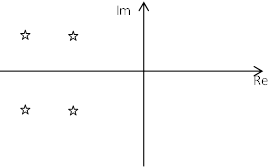
+ стійка
нестійка
на межі стійкості
фізично не реалізована
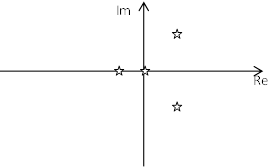
195. Система, що має таке розташування коренів характеристичного рівняння:
стійка
+ нестійка
на межі стійкості
фізично не реалізована
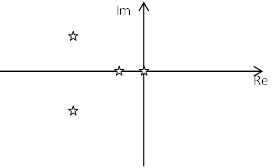
196. Система, що має таке розташування коренів характеристичного рівняння:
стійка
нестійка
+ на межі стійкості
фізично не реалізована
197. Виберіть з наведених критеріїв стійкості частотні:
+ Найквіста
Рауса
Гурвіца
+ Михайлова
198. Виберіть з наведених критеріїв стійкості алгебраїчні:
Найквіста
+ Рауса
+ Гурвіца
Михайлова
199. Знання якого з розділів математики знадобиться під час розрахунку критерія стійкості Гурвіца:
дференціальне числення
інтегральне числення
+ матрична алгебра
математичний аналіз
200. Згідно з критерієм стійкості Гурвіца всі діагональні мінори визначника Гурвіца повинні бути …
однакові
+ більше нуля
менше нуля
рівними нулю
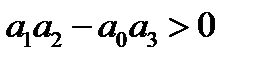
201. Для системи третього порядку  згідно з критерієм стійкості Гурвіца достатня умова стійкості формулюється так …
згідно з критерієм стійкості Гурвіца достатня умова стійкості формулюється так …
+ 

202. Серед наведених характеристичних рівнянь виберіть ті, які відповідають необхідній умові стійкості:
+ 
|
|
Дата добавления: 2015-06-26; Просмотров: 5262; Нарушение авторских прав?; Мы поможем в написании вашей работы!