КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пневматичний привод
|
|
|
|
Електричний привод.
Лабораторна робота № 4
Розробка автоматизованого пневмо-, гідроприводу технологічної машини.
Мета роботи: ознайомлення з основами автоматизації в машинобудуванні, різновидами автоматизованих приводів їх перевагами та недоліками; на прикладі пневматичного приводу освоїти навички розробки та побудови автоматизованих приводів технологічних машин.
Теоретичні відомості
Машинобудування - це ведучий комплекс галузей у промисловості, його рівень визначає подальший розвиток і прискорення наукового прогресу в інших галузях. Велику роль у вдосконаленні виробництва машин відіграють різноманітні автоматизовані приводи, зокрема приводи технологічних машин.
Розглянемо основні види приводів технологічних машин.
Позитивні якості:
- використання електричного струму;
- отримання практично усіх технічних характеристик по потужності, діапазону регулювання, та автоматизації.
Недоліки:
- при отриманні поступального руху використовуються механічні передачі, які приводять до ускладнення конструкції верстата, підвищують його масу і коштовність.
Пневматичний привод використовує двигуни, в яких механічний рух отримується за рахунок енергії стиснутого повітря.
Позитивні якості:
- пневмодвигун поступального руху (пневмоциліндр) має просту конструкцію, невелику коштовність і надійність.
Недоліки:
- велика стискаємість повітря приводить до ускладнення регулювання і підтримання швидкості руху;
- при малих швидкостях робочий орган рухається нерівномірно;
- невелика сила, що розвиває робочий орган.
Область використання: допоміжні переміщення у верстатах і промислових роботах. Інколи використовують системи керування верстатами, побудованими на пневматичних логічних елементах.
Гідравлічний привод
Позитивні якості:
- велика рухомість і мала стискаємість рідини дозволяють за допомогою простого по конструкції двигуна, отримати поступальний рух (гідроциліндр), з усіма вимогами по швидкості, рівномірності руху, силі, частоти пере вимкнень;
- робочий тиск у гідроприводах значно більше, ніж у пневмоприводах, тому розміри машин менше;
добре поєднується з іншими типами приводів, електронними схемами верстатів.
Недоліки:
- відносно коштовний в обслуговуванні;
- екологічно небезпечний (при пошкодженні може виливатись мастило);
- потребує гідравлічних станцій живлення.
Критерії вибору і характеристики системи, що беруться до уваги при виборі приводу технологічної машини:
• зусилля, що розвивається;
• робочий хід;
• вид руху (поступальне, поворотне, обертальне);
• швидкість;
• габарити;
• довговічність;
• надійність і безпека;
• вартість енергії;
• зручність експлуатації;
• акумулюємість.
Основні вимоги при проектуванні приводу технологічної машини:
• надійність;
• зручність ремонту і обслуговування;
• вартість запасних частин;
• простота монтажу і з'єднань;
• відповідність вартості по відношенню до попередньої системи;
• взаємозамінність і адаптивність;
• компактність конструкції;
• економічність;
• наявність технічної документації.
Більш докладно розглянемо пневматичних привод.
Пневматичні пристрої в системах автоматики виконують наступні функції:
• отримання інформації про стан системи за допомогою вхідних елементів (датчиків);
• обробка інформації за допомогою логіко-обчислювальних елементів (процесорів);
• керування виконавчими пристроями за допомогою розподільних елементів (підсилювачів потужності);
• здійснення корисної роботи за допомогою виконавчих пристроїв (двигунів).
Для керування станом і робочими процесами машин і установок необхідні системи з складними логічними зв'язками, які забезпечуються завдяки взаємодії датчиків, процесорів, виконавчих пристроїв і робочих механізмів з пневматичними або частково пневматичними пристроями.
Технічний прогрес у області створення матеріалів, способів конструювання і виробництва також сприяв поліпшенню якості і збільшенню різноманітності пневматичних пристроїв, що послужило основою для розширення області їх застосування як засобів автоматизації.
Для реалізації прямолінійного руху часто використовуються пневмоциліндри, оскільки вони характеризуються низькою вартістю, легкістю монтажу, простотою і міцністю конструкції, а також широким діапазоном основних параметрів.
Пневматичні виконавчі пристрої можуть реалізовувати наступні види руху:
• прямолінійне (поворотно-поступальне),
• поворотне (поворотно-поворотне),
• обертальний рух (ротація).
Приклади застосування пневматичних пристроїв:
• маніпуляторна техніка:
- затиск деталей,
- пересування деталей,
- позиціонування деталей,
- орієнтування деталей,
- розподіл потоків матеріалів;
• виробничі операції:
- упаковка;
-індикація, дозування;
-фіксація;
- поворот і перевертання;
- відкриття і закриття дверей;
- транспортування матеріалів;
- обертання деталей;
- сортування деталей;
- складування деталей;
- пресування деталей.
Пневматичні системи використовуються в технологічних процесах:
• свердління;
• токарної обробки;
• фрезерування;
• розпилювання;
• доведення;
• формування;
• контролю якості.
Пневматична система складається з ланцюга елементів різних груп, сполучених між собою певним чином. У загальному випадку керування робочим органом (циліндром) здійснюється за допомогою розподільника. При цьому вибір розподільника (число ліній, число положень перемикання і спосіб керування переміщеннями) залежить від кожної конкретної задачі.
Розглянемо приклад вирішення задачі автоматизації технологічної машини: шток циліндра односторонньої дії з великим діаметром поршня при натисненні на кнопку повинен затиснути деталь (рис. 4.1).
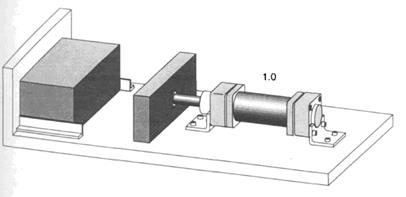
Рисунок 4.1. Ескіз об'єкту керування
Керування циліндром односторонньої дії здійснюється від розподільника з ручним приводом. Якщо «пневмокнопка» натиснута, то розподільник перемикається з початкового положення в положення "Живлення включене". Пневмосистема складається з:
• циліндра односторонньої дії з пружинним поверненням,
• розподільника з ручним керуванням і пружинним автоповерненням,
• лінії живлення, приєднаної до розподільника,
• пневмолінії між розподільником і циліндром.
Комутація між цими лініями визначається позицією (положенням) розподільника. Можливі положення перемикання зображені на рис. 4.2.
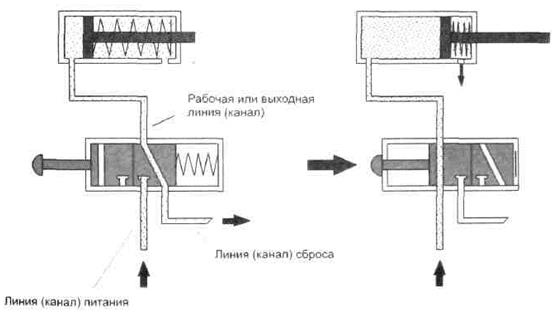
Рисунок 4.2. Керування циліндром односторонньої дії
Розглянемо пневматичну схему даного процесу (рис. 4.3).
У початковому положенні шток циліндра 1.0 втягнутий, розподільник 1.1 під дією поворотної пружини знаходиться у вимкненому стані. Пілотний розподільник 1.2 з ручним керуванням від кнопки під дією пружини також вимкнений і його вихідний канал 2(А) сполучений з атмосферою. Живлення стислим повітрям подається до каналів 1(Р) обох елементів 1.1 і 1.2 (рис. 4.3).
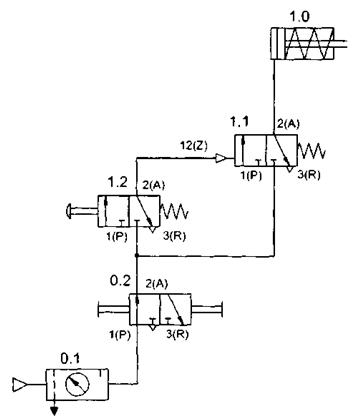
Рисунок 4.3. Принципова схема системи
Розподільник з ручним керуванням від кнопки 1.2 при спрацюванні відкриває прохід повітрю від каналу живлення 1(Р) до вихідного каналу 2(А), де з'являється пневматичний сигнал, що поступає на вхід 12(2) керуючого розподільника 1.1. Цим сигналом розподільник 1.1 перемикається, долаючи силу дії пружини, після чого канал живлення 1(Р) з'єднується з вихідним каналом 2(А), відкриваючи прохід повітрю в порожнину циліндра. Поршень циліндра починає рухатися, шток висувається. Сигнал на керуючому вході 12(2) розподільника 1.1 існуватиме, і шток циліндра залишатиметься у висунутому положенні до тих пір, поки буде натиснута кнопка 1.2. Це є непряме керування циліндром від кнопки (керування відбувається не безпосередньо розподільником, а за допомогою додаткових пристроїв).
Якщо кнопку відпустити, зворотна пружина перемістить розподільник 1.2 в початкове положення, відсікаючи вихідний канал 2(А) від живлення і сполучаючи його з атмосферою через канал 3(П). Це приведе до зникнення сигналу керування на розподільнику 1.1, який під дією пружини повертається в початкове положення, сполучаючи порожнину циліндра з атмосферою. При цьому пружина циліндра 1.0 переміщає поршень з штоком в початкове положення.
Завдання
Для виконання роботи розглянемо пневмопривод подачі вертикального преса, який повинен забезпечувати швидке затиснення заготовки від непрямого керування та повільне розтиснення від прямого керування (рис. 4.4).
Привід подачі вертикального преса складається з джерела живлення (компресора) 1, розподільника з ручним керуванням 2, клапана 3 із кнопкою керування, розподільника 4 з пневматичним керуванням, зворотного клапана (клапана, який пропускає повітря тільки в одному напрямку) із дроселем 5 та циліндра 6 із поворотною пружиною.
Робота привода налагоджена наступним чином. Стиснуте повітря від компресора 1 подається до розподільника 2, який знаходиться в центральному положенні непропускаючи повітря далі до інших елементів привода (рис. 4.4, а), при цьому права порожнина циліндра 6, через дросель 5, канал А розподільника 4 та глушник R, з’єднується із зовнішнім середовищем, що дозволяє пружині циліндра утримувати шток в крайньому лівому положенні.
При переміщенні розподільника 2 в крайнє ліве положення канал Р розподільника з’єднується із лінією В, пропускаючи стиснуте повітря до клапана 3 та каналу Р розподільника 4. Оскільки в лініях керування z та y, розподільника 4, тиск відсутній (клапан 3 при під дією пружини знаходиться в закритому положенні), то подальше проходження повітря не відбувається (рис. 4.4, б).
При натисненні кнопки керування клапана 3 він переміщується вправо з’єднуючи канал В розподільника 2 із лінією керування z розподільника 4. Тиск повітря в лінії керування z розподільника 4, переміщує його в праве положення, з’єднуючи канал Р розподільника 4 з каналом А. Це дозволяє повітрю проходити від компресора 1, через зворотній клапан 5 до циліндра 6, переміщуючи його в праве положення. Повітря з правої порожнини циліндра виходить на зовні через глушник R (рис. 4.4, в).
Якщо розподільник 2 знову повернути в центральне положення, то шток розподільника 6, не переміститься, оскільки в лій його порожнині існуватиме тиск. Для повернення, штока циліндра в початкове положення, що відбувається за рахунок пружини циліндра 6, потрібно його праву порожнину з’єднати із зовнішнім середовищем – знизити в ній тиск до атмосферного. Для цього потрібно перемістити розподільник 2 в крайнє праве положення, що приведе до з’єднання каналів Р і А розподільника 2. Тиск
Тиск повітря в лінії керування y розподільника 4, перемістить його в ліве положення, з’єднуючи канал А розподільника 4 із зовнішнім середовищем через глушник R. Таке розміщення елементів керування привода з’єднуватиме праву порожнину циліндра 6 із зовнішнім середовищем через дросель 5, що призведе до повільного (плавного) переміщення циліндра вліво (рис. 4.4, г).


Устаткування та обладнання, що необхідне для виконання роботи
1. Пневматична станція живлення.
2. Стенд для моделювання пневматичних систем фірми FESTO;
3. Набір пневматичних розподільних та керуючих пристроїв фірми FESTO;
4. Набір пневматичних двигунів поступальної дії.
5 Набір з’єднувальних рукавів;
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1942; Нарушение авторских прав?; Мы поможем в написании вашей работы!