КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Кинематический анализ эпициклического механизма
|
|
|
|
Определить передаточное отношение замкнутого дифференциального редуктора i I II аналитическим и графическим способом. Заданы числа зубьев всех колес.
Замкнутый дифференциальный редуктор получается путем замыкания дополнительной передачей одного из центральных колес и водила. Степень подвижности такого механизма равна единице.
 |
Рисунок 2- схема редуктора
Таблица 1 – Исходные данные, числа зубьев
| Сх. 3 | ||||||||||
| Z1 | ? | ? | ||||||||
| Z2 | ? | ? | ? | |||||||
| Z3 | ? | ? | ? | |||||||
| Z4 | ? | ? | ||||||||
| Z5 | ? | ? | ? | |||||||
| Z6 | ? | ? | ? | ? | ? | |||||
| Z7 | ? | ? |
Для дифференциальной части редуктора, согласно формуле Виллиса, имеем:
 , (34)
, (34)
где w1, w4 и wн - угловые скорости соответствующих колес и водила;
z1, z2, z3, z4 - числа зубьев соответствующих колес;
k – количество внешних зацеплений.
Для замыкающей передачи передаточное отношение i 75 будет равно
 . (35)
. (35)
откуда
 . (36)
. (36)
Заметим, что wн=w7,и w4 =w5.
Тогда
 . (37)
. (37)
Подставим полученное выражение для wн (37) в формулу (34) и получим
 . (38)
. (38)
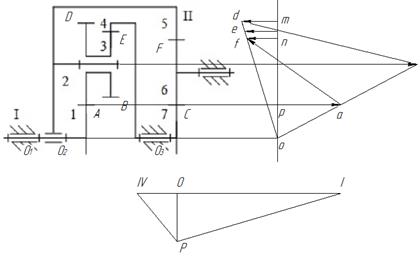
Рисунок 3- План угловых скоростей
 . (39)
. (39)
Откуда передаточное отношение i 14 будет равно
 . (40)
. (40)
Графический способ.
Рядом с кинематической схемой редуктора, выполненной в масштабе m l =... м/мм проводим вертикальную прямую ОО6.
В нашем примере удобно начать с замыкающей передачи. Зададимся линейной скоростью точки А в виде вектора  произвольной длины. Начало вектора - вертикальная прямая ОО6. Соединим конец вектора с точкой О и получим картину скоростей колеса 7 и водила. Полюс зацепления колес 7 и 6 является общим. Ось О6 неподвижна. Соединим конец вектора с точкой О6 и получим картину скоростей для 6 колеса. Перенесем полюс зацепления В и получим вектор
произвольной длины. Начало вектора - вертикальная прямая ОО6. Соединим конец вектора с точкой О и получим картину скоростей колеса 7 и водила. Полюс зацепления колес 7 и 6 является общим. Ось О6 неподвижна. Соединим конец вектора с точкой О6 и получим картину скоростей для 6 колеса. Перенесем полюс зацепления В и получим вектор  скорости точки В. Полюс зацепления колес 5 и 6 общий. Ось 5 колеса неподвижна. Соединим точку О и конец вектора и получим картину скоростей для 5 и 4 колес.
скорости точки В. Полюс зацепления колес 5 и 6 общий. Ось 5 колеса неподвижна. Соединим точку О и конец вектора и получим картину скоростей для 5 и 4 колес.
|
|
|
Спроецируем точки C и D на ось ОО6. Соединим точки c и d получим картину скоростей для 2 и 3 колес. Скорость точки Е (вектор  ) определим спроецировав точку Е на картину скоростей звена 2. Скорости колес 1 и 2 в полюсе зацепления равны. Соединим точку О с концом вектора и получим картину скоростей для колеса 1.
) определим спроецировав точку Е на картину скоростей звена 2. Скорости колес 1 и 2 в полюсе зацепления равны. Соединим точку О с концом вектора и получим картину скоростей для колеса 1.
Для определения передаточного отношения перенесем полученные картины скоростей зубчатых колес в общий полюс Р. Отрезок  параллельно картине скоростей 1 колеса (отрезок
параллельно картине скоростей 1 колеса (отрезок  ), отрезок
), отрезок  параллельно картине скоростей четвертого колеса (отрезок
параллельно картине скоростей четвертого колеса (отрезок  ). Измерим полученные отрезки
). Измерим полученные отрезки  и
и  и определим по формуле передаточное отношение i 14 по формуле
и определим по формуле передаточное отношение i 14 по формуле
 (41)
(41)
Погрешность между расчетным значением передаточного числа i_P и значением, полученным графическим путем i_Г составляет:
∆i=(i_P – i_Г)/i_P ∙ 100% = 0%.
ЗАКЛЮЧЕНИЕ
В ходе выполнения курсового проекта был проведен кинематический анализ механизма брикетного автомата и определены линейные и угловые перемещения, скорости и ускорения характерных точек механизма.
В результате кинетостатического анализа были получены значения реакций кинематических парах и уравновешивающей силы для двух положений механизма.
|
|
|
|
|
Дата добавления: 2015-06-30; Просмотров: 906; Нарушение авторских прав?; Мы поможем в написании вашей работы!