КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системы координат на станках с ЧПУ различного типа
Для управления движением формообразования необходимо однозначно определить все точки рабочего пространства станка. С этой целью используют координатную систему станка, в которой ориентируют обрабатываемую заготовку (изготовляемую деталь), и составляют управляющую программу, определяя траекторию перемещения режущего инструмента. В соответствии с рекомендациями ИСО по ГОСТ 23597 на станках с ЧПУ принята единая стандартная правая система координат (рис.2.1а). Координатные оси системы располагают параллельно направляющим станка, что позволяет напрямую программировать величину и направление поступательных и вращательных перемещения рабочих органов станка.
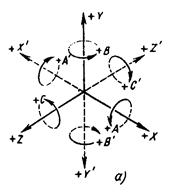
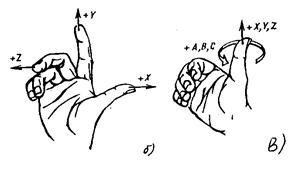
Рис.2.1 Система координат станков с ЧПУ: а - направления
движения инструмента и заготовки; б – использование
правила правой руки для определения положительных
направлений осей координат.
Для определения положительного направления осей координат удобно использовать правило правой руки (рис.2.1б). Ладонь правой руки ориентируется на торец шпинделя. Ось Z совмещается с осью шпинделя, ей соответствует средний палец, указывающий на положительное направление оси Z. Ось X располагается горизонтально, ей соответствует крайний палец, определяющий положительное направление оси X. Оси Y соответствует средний, указательный палец, показывающий на положительное направление оси Y.
За положительное направление кругового перемещения А, В, С рабочих органов вокруг соответствующих координатных осей X, Y, Z принято вращение по часовой стрелке при взгляде вдоль положительного направления оси. При пользовании правилом правой руки (рис.2.1б) необходимо крайний, толстый палец расположить по направлению соответствующей оси, тогда остальные согнутые пальцу укажут на положительное направление вращения.
Направление стрелок координатных осей X,Y,Z указывает на положительное направление перемещения режущего инструмента относительно неподвижных частей станка. При перемещении заготовки относительно неподвижных частей станка ее положительные перемещения направлены в обратном направлении, и их обозначают индексом соответствующей оси со штрихом X¢, Y¢, Z¢. Т.о. при положительном направлении перемещения инструмента или заготовки имеет место их относительное удаление.
Т.о. программируемое круговое перемещение инструмента в положительном направлении обозначают буквами А, В, С, а круговое перемещение заготовки на поворотном столе в положительном направлении обозначают теме же буквами со штрихом А¢, В¢, С¢. В понятие круговое перемещение не входит вращение шпинделя, на котором базируется заготовка, как например на токарном станке, или инструмент, например на сверлильном станке. На рис.2.2 показан пример применения правила правой руки для определения координатной системы вертикально-фрезерного станка с ЧПУ.
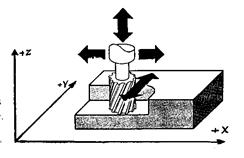
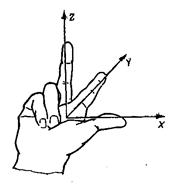
Рис.2.2 Применение правила правой руки для определения
координатной системы вертикально-фрезерного станка.
Схема расположения координатных систем на двух станках с ЧПУ фрезерно-расточного типа с горизонтальным и вертикальным расположением шпинделя показана на рис. 2.3.
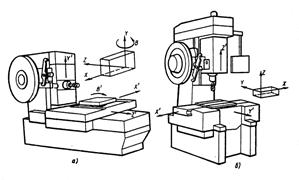
Рис.2.3 Координатные системы на станках с ЧПУ фрезерно-расточного типа:
а – с горизонтальным расположением шпинделя; б – с вертикальным расположением шпинделя.
Рис.2.4 Применение вторичных осей на токарно-карусельном станке с ЧПУ.
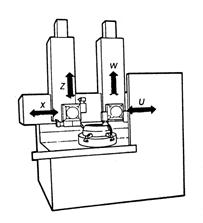 Для программирования перемещений двух или трех рабочих органов станка в одном направлении используют так называемые вторичные U, V, W и третичные P, Q, R координатные оси, которые соответствуют осям X, Y, Z. На рис. 2.4 в качестве примера показано использование вторичных осей на 4-х координатном, двух суппортном токарно-карусельном станке с ЧПУ. На левом суппорте управление осуществляется по координатам X, Z, а на правом по координатам U, W, имеющим аналогичное направление.
Для программирования перемещений двух или трех рабочих органов станка в одном направлении используют так называемые вторичные U, V, W и третичные P, Q, R координатные оси, которые соответствуют осям X, Y, Z. На рис. 2.4 в качестве примера показано использование вторичных осей на 4-х координатном, двух суппортном токарно-карусельном станке с ЧПУ. На левом суппорте управление осуществляется по координатам X, Z, а на правом по координатам U, W, имеющим аналогичное направление.
Схемы расположения координатных систем на станках с ЧПУ различного типа, представлены на рис. 2.5.
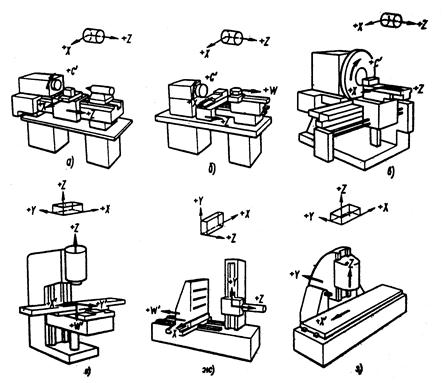
Рис.2.5 Расположения координатных систем на станках с ЧПУ:
а – токарно-винторезном; б – токарно-револьверном;
в – лоботокарном; г - вертикально-фрезерном;
д – горизонтально-расточном: е – продольно- фрезерном.
|
Дата добавления: 2014-01-03; Просмотров: 5341; Нарушение авторских прав?; Мы поможем в написании вашей работы!