КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Режим гололеда с ветром 2 страница
|
|
|
|
где  v=
v=  =
= 
Разрежем мысленно нить в точке D и составим сумму моментов всех сил относительно этой точки:
 =
=  (3.5)
(3.5)
Подставляя (3.4) в (3.5) получаем величину провеса:
P=  (3.6)
(3.6)
Длина дуги АЕ определяется выражением (2.17):
АЕ=  (3.7)
(3.7)
Длина дуги AG равна:
AG=  (3.8)
(3.8)
Вычитывая (3.8) из (3.9) получаем дугу GE равную искомой GD
GE=  (3.9)
(3.9)
Расстояние b на котором меняется локальная сила натяжения  можно найти, приравнивая вертикальные составляющие сил в точке
можно найти, приравнивая вертикальные составляющие сил в точке  Фиктивная вертикальная нагрузка на участке
Фиктивная вертикальная нагрузка на участке  ,равная qb уравновешивается Р/2:
,равная qb уравновешивается Р/2:
qb= 
Сила Р уравновешивает вес нити на Р=2qGD, или используя (3.9) получаем:
b= 
Из двух последних выражений и соотношения (3.4) получаем:
 (3.10)
(3.10)
=  (3.11)
(3.11)
f=  (3.12)
(3.12)
Формулы (3.11) и (3.12) определяют изменение горизонтального натяжения и провеса тяжелой нити,моделирующей контактный провод вызваны приложением сосредоточенной силы Р со стороны токоприемника.
Данные для расчетов представлены в таблице (3.1)  .В таблице также показаны изменение фазовой скорости вертикальной волны
.В таблице также показаны изменение фазовой скорости вертикальной волны  /u в области приложения сосредоточенной нагрузки,а также ширина этой области 2b.
/u в области приложения сосредоточенной нагрузки,а также ширина этой области 2b.
Таблица 3.1-Изменения силы натяжения и силы провеса контактного провода подвески КС-200 при различных силах нажатия токоприемника при стреле провеса  =30мм и натяжении контактного провода
=30мм и натяжении контактного провода  12км
12км
| №п/п | Формула | P=100H | P=200H |
v  P P  gl gl
| 0,160 | 0,320 | |
 = = 
| 9,836kH | 8,225kH | |
f= 
| 16,72мм | 8,748мм | |
 f= f= 
| 13,28мм | 21,252мм | |
 = = 
| 0,953мм | 0,8294мм | |
| 2b | 12м | 24м |
На рисунке 3.3 а показана относительная изменения натяжения  контактного провода с изменением силы Р приложенной токоприемником в середине пролета,а на рисунке вызванное ею изменение фазовой скорости вертикальной волны. Из рисунка 3.3 б видно,что воздействие токоприемника существенно изменяет натяжения контактного провода до 80% от начального.Это влияет на скорость распространения волны,если ее рассчитать по формуле (3.4),используя вместо
контактного провода с изменением силы Р приложенной токоприемником в середине пролета,а на рисунке вызванное ею изменение фазовой скорости вертикальной волны. Из рисунка 3.3 б видно,что воздействие токоприемника существенно изменяет натяжения контактного провода до 80% от начального.Это влияет на скорость распространения волны,если ее рассчитать по формуле (3.4),используя вместо  величину
величину  .
.
|
|
|
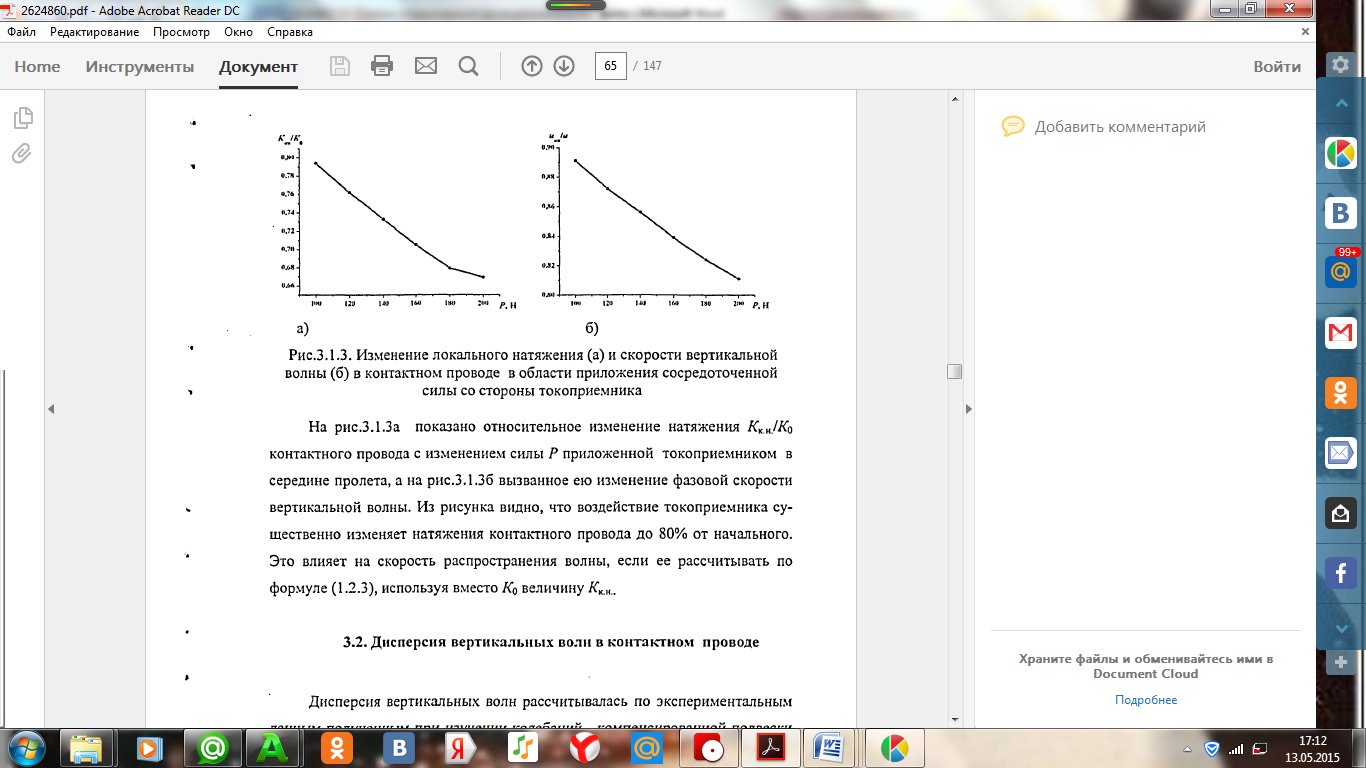
а) б)
Рисунок 3.3 Изменения локального натяжения (а) и скорости вертикальной волны (б) в области приложения сосредоточенной силы со стороны токоприемника
3.2 Модель взаимодействия токоприемника с контактной подвеской на основе уравнения Клейна-Гордона
Ниже рассматривается модель распространения волн.в контактном проводе основанная, на уравнении Клейна-Гордона, в которой учитывается как масса контактного провода, так и низкочастотная дисперсия вертикальных волн  В модели рисунок 3.4 участок колеблющегося контактного провода рассматривается как система из n-тел, (n→
В модели рисунок 3.4 участок колеблющегося контактного провода рассматривается как система из n-тел, (n→  . Каждое из которых
. Каждое из которых
парциальным математическим маятником, т.е., частицей массой т, укрепленной на нити длиной  и связанными с соседними маятниками упругой связью жесткостью Ж. Собственная частота колебаний каждого парциального маятника равна:
и связанными с соседними маятниками упругой связью жесткостью Ж. Собственная частота колебаний каждого парциального маятника равна:
 =
=  , (3.13)
, (3.13)
где g= 9,8 м/с2 - ускорение свободного падения.
Жесткость связи Ж между этими элементарными колебательными системами настолько велика, что их колебания происходят с малыми амплитудами и очень малым фазовым сдвигом.
Колебания участков контактной подвески у опор и в середине пролета происходят с разной собственной частотой . Этот фактор в рассматриваемой модели учитывается выделением области I, в которой длина нитей равна  и области II, где она равна
и области II, где она равна  .Частоты в этих областях удовлетворяют соотношению.
.Частоты в этих областях удовлетворяют соотношению.
 =
=  . (3.14)
. (3.14)
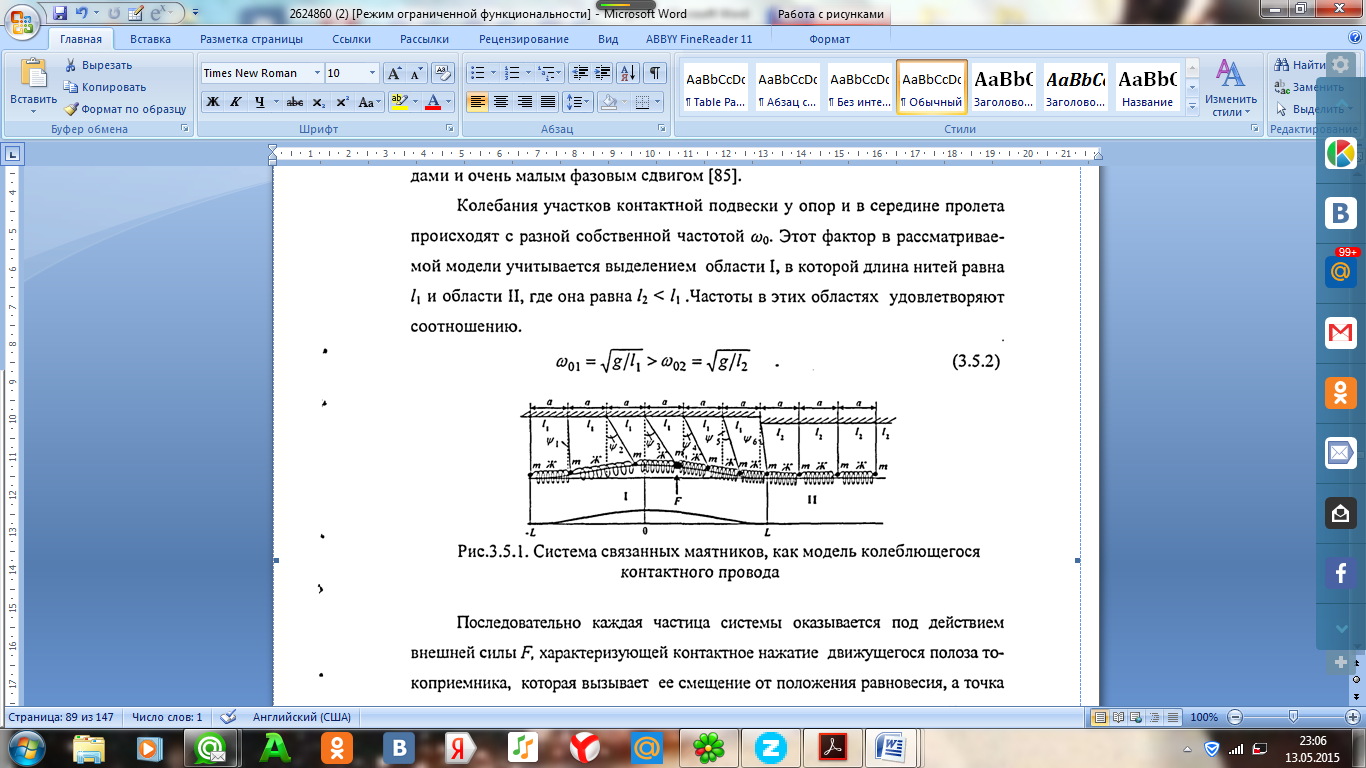
Рисунок 3.4 Система связанных маятников, как модель колеблющегося
контактного провода
Последовательно каждая частица системы оказывается под действием внешней силы F, характеризующей контактное нажатие движущегося полоза токоприемника, которая вызывает ее смещение от положения равновесия, а точка приложения этой силы перемещается вдоль оси х с некоторой скоростью V 
|
|
|
Введем систему координат, начало которой x=0 совмещено с точкой приложенной силы Fи рассмотрим движение  частицы, находящейся в точ
частицы, находящейся в точ
ке.х>0. В дальнейшем будет показано, что скоростью V определяется частота  , с которой внешняя сила Fвоздействует на рассматриваемую колебательную систему:
, с которой внешняя сила Fвоздействует на рассматриваемую колебательную систему:
F(t)=  cos( t +
cos( t +  ) (3.15)
) (3.15)
Из-за большой скорости движения токоприемника в предлагаемой модели подвески затуханием колебаний частиц тп можно пренебречь. При этом допущении смещение данной частицы тп находится либо в фазе, либо в противофазе с внешней силой.
Уравнение смещения  nой частицы со временем t имеет вид:
nой частицы со временем t имеет вид:
 (3.16)
(3.16)
где определена формулой
При.малом расстоянии а между частицами тп, (t)функция медленно меняется с увеличением п, так что смещение можно считать непрерывной функцией  - Разложение в ряд Тейлора функций, входящих в
- Разложение в ряд Тейлора функций, входящих в
и последующие преобразования дают:
 =
=  +
+  +O(
+O( )
)
(3.17)
 =
=  + O()
+ O()
Подстановка (3.17) в (3.16) приводит к волновому уравнению типа Клейна-Гордона:
 (3.18)
(3.18)
При  данное уравнение принимает форму (3.13). Но величина
данное уравнение принимает форму (3.13). Но величина  , как видно из (3.13) обусловлена силой тяжести, действующей на рассматриваемую колебательню систему. Фактор нахождения подвески в поле силы тяжести в модели невесомой струны, как отмечалось выше, не учитывался. Решение уравнения (3.14) ищем в виде:
, как видно из (3.13) обусловлена силой тяжести, действующей на рассматриваемую колебательню систему. Фактор нахождения подвески в поле силы тяжести в модели невесомой струны, как отмечалось выше, не учитывался. Решение уравнения (3.14) ищем в виде:
 G(x)cos( t
G(x)cos( t  ), (3.19)
), (3.19)
где G(x) - искомая функция, описывающая пространственную конфигурацию рассматриваемых частиц тп, совершающих коллективное колебание под действием внешней силы с частотой .
Двойное дифференцирование (3.15) по переменным t и x их и последую-щая подстановка вторых производных  и
и  в (3.16) приводит к дифференциальному уравнению, позволяющему найти её:
в (3.16) приводит к дифференциальному уравнению, позволяющему найти её:
 (3.20)
(3.20)
Вид решения уравнения (3.20) будет различным для случаев ( ²)
²)  и ( ²) < 0. Для анализа этих случаев введем две положительные константы:
и ( ²) < 0. Для анализа этих случаев введем две положительные константы:
k²= ( ²
²  ) * m/Ж
) * m/Ж  ²
²
(3.21)
 =(
=( ²)* m/Ж ²
²)* m/Ж ²
с которыми уравнение (3.20) запишется в виде:
 =
=  (x)
(x)
(3.22)
= x  (x)
(x)
Общие решения этих уравнений соответственно имеют вид:
|
|
|
G(x) = Dsinkx+Jcoskx;G(x) = B*  +C*
+C*  (3.23)
(3.23)
где D, J, В и С - постоянные интегрирования, определяемые граничными условиями.  Подстановка (3.24) или же (3.25) в (3.19) дает общее решение для функций
Подстановка (3.24) или же (3.25) в (3.19) дает общее решение для функций  описывающих волны в рассматриваемых случаях
описывающих волны в рассматриваемых случаях
 и
и  ;
;
 (x,t)=
(x,t)=  cos
cos  (3.24)
(3.24)
(x,t)=  cos (3.25)
cos (3.25)
Эти уравнения и описывают волновые пакеты конечной протяженностью V, схематично показанные на рисунке 3.5а и 3.5 б.
Скорость убывания его амплитуды определяется диссипативными эффектами, учет которых требует, чтобы коэффициенты D и Jуменьшались с течением времени.
а)
б) 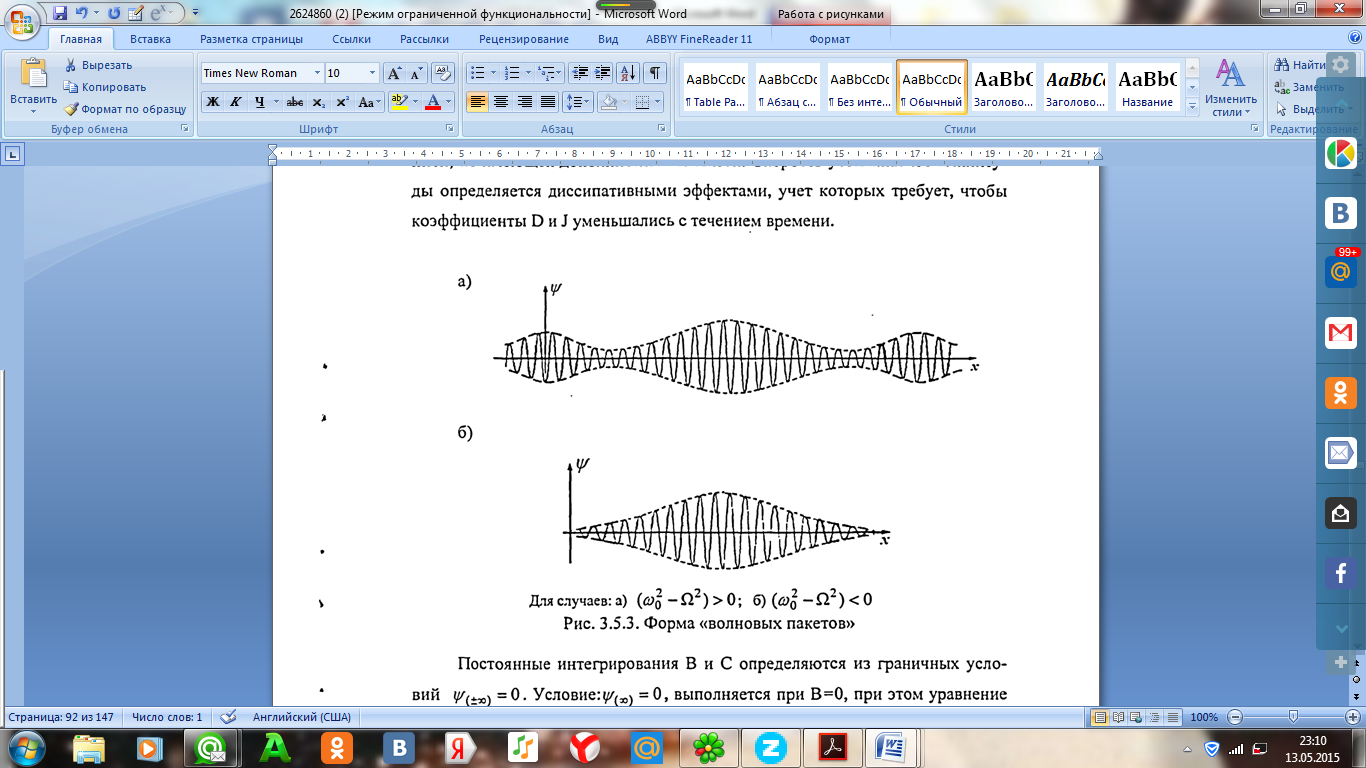
где постоянные интегрирования В и С определяются из граничных условий  Условие:
Условие:  ,
,
Для,случаев  ;б) ;
;б) ;
Рисунок 3.5 Форма «волновых пакетов»
Выполняется при В=0, при этом уравнение
(3.26) будет:
(x,t)=C *  . (3.26)
. (3.26)
т.е. функция G{x) является убывающей с координатой х экспонентой:
G(x) = C* . (3.27)
Величина  , называемая экстинцией, характеризует уменьшение смещения контактного провода, приходящееся на единицу длины вдоль оси х, а обратная ей
, называемая экстинцией, характеризует уменьшение смещения контактного провода, приходящееся на единицу длины вдоль оси х, а обратная ей  1
1  - расстояние, на котором отжатие контактного провода будет меньше, чем под полозом токоприемника в е =2,718 раз. Можно принять,что на расстоянии b=3
- расстояние, на котором отжатие контактного провода будет меньше, чем под полозом токоприемника в е =2,718 раз. Можно принять,что на расстоянии b=3  амплитуда уменьшается до нуля.
амплитуда уменьшается до нуля.
Тогда протяженность «волнового пакета» будет V =2  Рассмотрим прохождение волнового пакета из области I в область II, показанного на рисунке. Различие в собственных частотах колебаний парциальных маятников в этих областях учтено, как указывалось выше, различием длин и
Рассмотрим прохождение волнового пакета из области I в область II, показанного на рисунке. Различие в собственных частотах колебаний парциальных маятников в этих областях учтено, как указывалось выше, различием длин и  Примем для определенности, что область II неограниченно велика (x
Примем для определенности, что область II неограниченно велика (x  . На практике это отвечает, например, изменению высоты контактного провода (искусственные сооружения с различной высотой расположения перекрытия).
. На практике это отвечает, например, изменению высоты контактного провода (искусственные сооружения с различной высотой расположения перекрытия).
На парциальный маятник  в точке х=0 действует сила F вынуждающая частицу совершать колебания:
в точке х=0 действует сила F вынуждающая частицу совершать колебания:
 (t)=
(t)=  cos t.
cos t.
Пусть в области I выполняется  а в области II
а в области II

Найдем функцию которая при x=0 удовлетворяет  , а для любого х имеет вид:
, а для любого х имеет вид:
 =G(x)cos(
=G(x)cos( , (3.28)
, (3.28)
где G(x) подлежит определению. На эту функцию накладываются условия, что в области I она имеет вид:
|
|
|
Gx(x) = Asink(x-L) (3.29)
здесь А и В неизвестные константы, а волновое число к — определяется соотношением:
 = M/ka²*(
= M/ka²*(  ) (3.30)
) (3.30)
а за пределами области I(L  функция G(x) имеет вид:
функция G(x) имеет вид:
 (x)=D*
(x)=D*  , (3.31)
, (3.31)
где D- постоянная, определяемая ниже,  выражается равенством:
выражается равенством:
 = m/K
= m/K  *(g/ - ²), (3.32)
*(g/ - ²), (3.32)
причем в обеих областях выполняется g/l1  .
.
Условия, определяющие непрерывность и гладкость функций  Gj (x) при x=L имеют вид:
Gj (x) при x=L имеют вид:
 (L)=
(L)=  , (3.33)
, (3.33)
 (3.34)
(3.34)
Условие (3.33) выполняется при B=C, равенство (3.34) дает Ka=-  . Таким образом, для области I имеем:
. Таким образом, для области I имеем:
C  (3.35)
(3.35)
Подстановка (3.34) в (3.33) дает:
 (x)=
(x)=  *
*  . (3.36)
. (3.36)
Полное решение определится из уравнений (3.19), (3.31), (3.36) и
(3.22) и дисперсионных соотношений (3.9) и (3.10).
Подстановка (3.21) в (3.23) приводит к окончательному виду функции, описывающей колебательное движение системы, моделирующей участок контактной подвески, совершающей вынужденные колебания под воздействием колеблющегося в вертикальном направлении токоприемника:
(x)=  *
*  (3.37)
(3.37)
Знаменатель в последнем выражении при некоторых значениях kL обращается в нуль, что означает возрастание амплитуд колебаний, т.е. возникновение резонансов. Если учесть затухания, то эти амплитуды не могут быть бесконечно большими 
Приравняем знаменатель (3.37) нулю и преобразуем его к виду:
 kL= k
kL= k  (3.38)
(3.38)
Точки их пересечения определяют искомые корни уравнения, характеризующие резонансы, как это показано на рисуноке 3.6
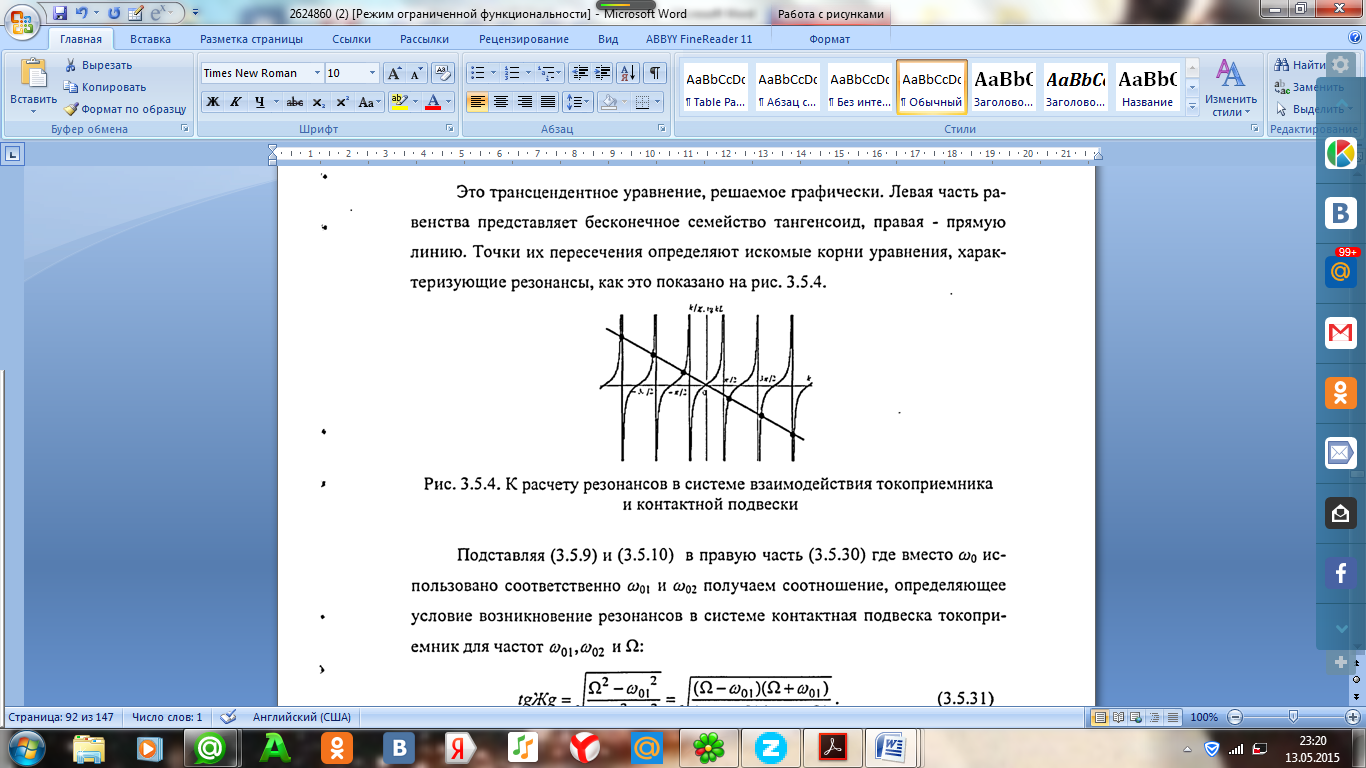
Рисунок 3.6 К расчету резонансов в системе взаимодействия токоприемника
и контактной подвески
Подставляя (3.19) и (3.23) в правую часть (3.38) где вместо использовано соответственно и  получаем соотношение, определяющее условие возникновение резонансов в системе контактная подвеска токоприемник для частот , и :
получаем соотношение, определяющее условие возникновение резонансов в системе контактная подвеска токоприемник для частот , и :
 =
=  =
=  (3.39)
(3.39)
Если выполняется условие,  , то последнее выражение упрощается:
, то последнее выражение упрощается:
tgЖg=  (3.40)
(3.40)
Частоту можно определить следующим образом. Известно, что эластичность контактной подвески  на разных участках пролета различна. Например, у подвески КС-200 в середине пролета
на разных участках пролета различна. Например, у подвески КС-200 в середине пролета  = 0,385 мм/Н, а у опоры она равна
= 0,385 мм/Н, а у опоры она равна  0,325
0,325  Поэтому в середине пролета изменение кривой провисания, вызываемое подъемом провода токоприемником обуславливает увеличение силы контактного нажатия F, по сравнению с участком около опоры. Т.к. опоры расположены друг от друга на равном расстоянии
Поэтому в середине пролета изменение кривой провисания, вызываемое подъемом провода токоприемником обуславливает увеличение силы контактного нажатия F, по сравнению с участком около опоры. Т.к. опоры расположены друг от друга на равном расстоянии  /=65м, тогда, = V
/=65м, тогда, = V  где V - скорость движения электровоза, м/с. Подставляя это значение в (3.32), можно по заданному значению V определить условия возникновения резонансов.
где V - скорость движения электровоза, м/с. Подставляя это значение в (3.32), можно по заданному значению V определить условия возникновения резонансов.
Числитель и знаменатель можно рассматривать как глубину модуляции колебаний контактной подвески колеблющимся токоприемником. При большом числе гармоник Ц, характеризующих собственные колебания токоприемника и кузова электровоза возникают многочисленные резонансы, затрудняющие качество токосъема. Для его улучшения необходимо гашение этих низкочастотных колебаний токоприемника и кузова э.п.с.
3.3 Главные колебания в системе токоприемник контактная подвеска
Разделим волновые процессы в несущем тросе и контактном проводе, исходя из следующего  Несущий трос крепится к опорам и точки его крепления неподвижны. Поэтому в нем возможно образование только стоячих волн, длина которых удовлетворяет соотношению:
Несущий трос крепится к опорам и точки его крепления неподвижны. Поэтому в нем возможно образование только стоячих волн, длина которых удовлетворяет соотношению:
 (3.41)
(3.41)
где  =1,2…-целое число.
=1,2…-целое число.
Эти длины волн, определяется расстоянием между опорами и не зависят от того, каким образом колебания возбуждается. В контактном проводе возникает бегущая полигармоническая волна, локализованная,как показано на рисунке 3.7 в некотором интервале  по координате x и в интервале
по координате x и в интервале  по переменной
по переменной  .
.
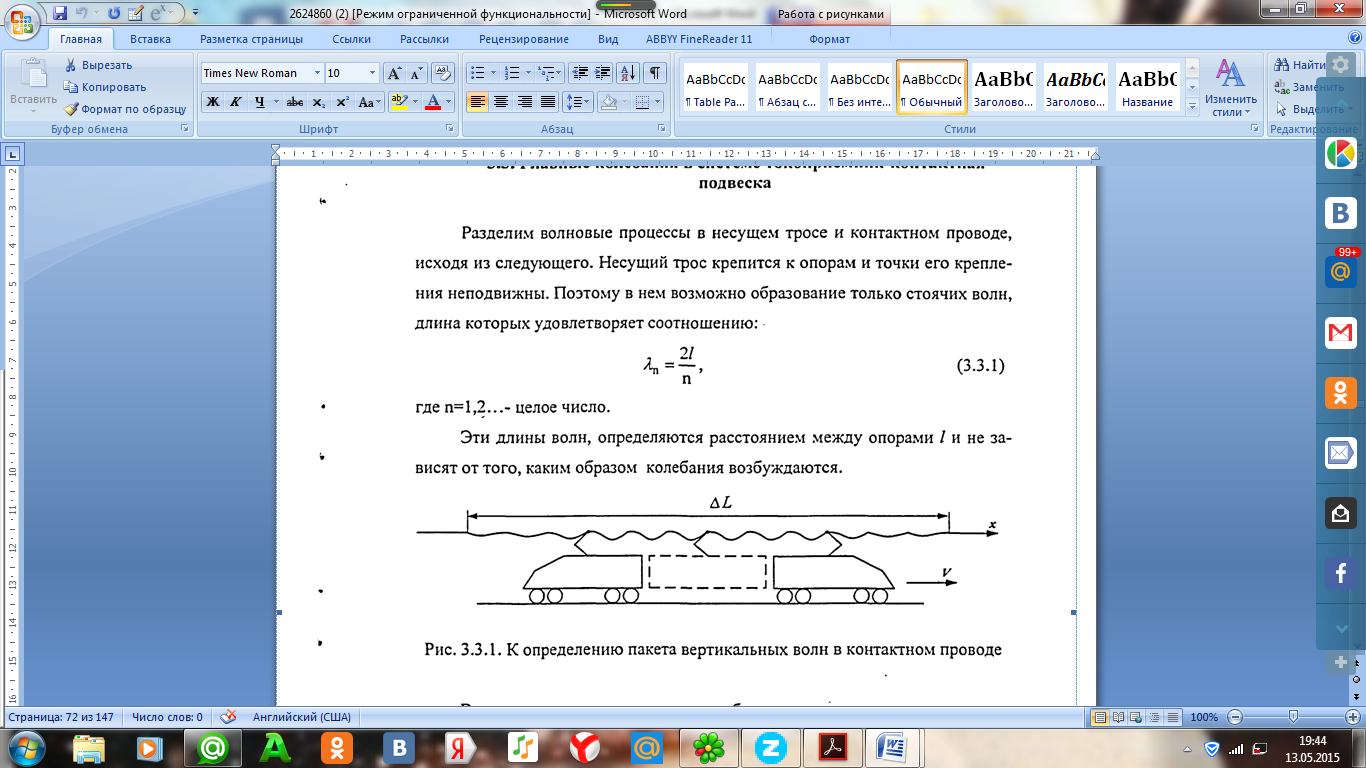
Рисунок 3.7 К определению пакета вертикальных волн в контактном проводе
Эта волна,как совокупность большого числа колебания гармоник будет в дальнейшим называться как систему  волновых пакетов
волновых пакетов  . Волновой пакет распространяется с групповой скоростью
. Волновой пакет распространяется с групповой скоростью  пространственная ограниченность пакета обусловленна диссипативными эффектами,имеющими место при колебаниях подвески.Токоприемниками э.п.с всегда распологается внутри пакета.Для оценки волнового пакета необходимо рассмотреть колебания токоприемника и контактной подвески в точки контакта с полозом.При этом будем полагать,что волны в подвеске создаются только одним токоприемником э.п.с.,прочие факторы (отражение волн,образование волн несколькими рабочими токоприемниками,ветровое воздействие на подвеску и др.) рассматриваться не будут.
пространственная ограниченность пакета обусловленна диссипативными эффектами,имеющими место при колебаниях подвески.Токоприемниками э.п.с всегда распологается внутри пакета.Для оценки волнового пакета необходимо рассмотреть колебания токоприемника и контактной подвески в точки контакта с полозом.При этом будем полагать,что волны в подвеске создаются только одним токоприемником э.п.с.,прочие факторы (отражение волн,образование волн несколькими рабочими токоприемниками,ветровое воздействие на подвеску и др.) рассматриваться не будут.  .Кузов электровоза (а также моторные вагоны э.п.с) совершают колебания с малыми частотами,которые обычно не учитываютсяри рассмотрении волновых процессов в контактной подвеске.В данном разделе
.Кузов электровоза (а также моторные вагоны э.п.с) совершают колебания с малыми частотами,которые обычно не учитываютсяри рассмотрении волновых процессов в контактной подвеске.В данном разделе
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 290; Нарушение авторских прав?; Мы поможем в написании вашей работы!