КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Выбор двигателя
|
|
|
|
Согласно требованиям Регистра РФ, мощность двигателя якорного механизма должна обеспечивать непрерывное выбирание якорной цепи со скоростью не менее 0,15 м/с при тяговом усилии:
 ,
,
где а = 36,8 – коэффициент для цепей I категории прочности,
электросварные обыкновенные;
а = 41,7 – коэффициент для цепей II категории прочности, электросварные или литые повышенной прочности;
а = 46,6 – коэффициент для цепей III категории, цепи особой прочности.
Данные якорной цепи, в зависимости от калибра, выбираются из таблицы 2. В данном курсовом проекте принимаются цепи особой прочности, категории III.
Согласно ГОСТ 8575-77 наибольший момент электродвигателя должен
создавать напряжение в цепи не превышающее напряжения 0,6 напряжения при пробной нагрузке. С учётом отклонений на: увеличение усилия при прохождении клюза, увеличение усилия в результате трения покоя, увеличение усилия при повышении напряжения в сети, запас на пусковой момент и т.д., - напряжение якорной цепи σmax при включении привода не должно превышать 0,2 напряжения при пробной нагрузке:
 .
.
Номинальный момент исполнительного двигателя определяется по формуле:
 Н·м.
Н·м.
В условиях отрыва якоря от грунта, двигатель должен преодолеть полуторократные усилия сравнительно с расчётными. При условии, что
момент трогания характеризуется повышением статических коэффициентов отдельных звеньев и всего механизма, пусковой момент должен быть увеличен ещё на 0,5МН:
 Н·м.
Н·м.
Номинальная частота вращения электродвигателя должна отвечать нормированной скорости выбирания цепи при расчётной нагрузке  м/с.
м/с.
Отсюда необходимая угловая скорость электропривода:

При переходе якоря к клюзу его скорость не должна быть более 0,12 м/с, поэтому минимально-необходимая скорость двигателя
|
|
|

Отсюда номинальная мощность двигателя

По полученным данным выбираем электродвигатель серии МАП исполнения 4А250L8/6/4У3, со следующими данными:
Таблица 3 – Паспортные данные двигателя серии МАП исполнения 4А200L8/6/4У3
| PH, кВт | nH, об/мин | ωH, рад/с | UH, В | IH, А | cosφ | ηH, % | 2p | λM |
| 103.6 | 52.2 | 0,75 | 85,5 |
Для всех типов шпилей и брашпилей морских судов с калибром цепи до 100 мм наиболее целесообразно применение короткозамкнутых асинхронных двигателей динамического режима, серии МАП, с двумя – тремя обмотками.
Габаритные, установочные и присоединительные размеры (рис. 1.1), а также масса электродвигателя 4А200L8У3 приведены в таблице 1.4.
Таблица 4 – Габаритные, установочные, присоединительные размеры и масса электродвигателя 4А200L8У3; степень защиты IP44
| Габаритные размеры, мм | Установочные и присоединительные размеры, мм | ||||||||||||||||
| l30 | h31 | d30 | l1 | l10 | l11 | l12 | l31 | l34 | l36 | l51 | b1 | b10 | b11 | b12 | |||
Продолжение таблицы 4
| Установочные и присоединительные размеры, мм | Масса, кг | ||||||||
| b31 | b34 | h | h1 | h5 | h10 | h34 | d1 | d10 | |

Рисунок 5. Основные габаритные, установочные и присоединительные размеры электродвигателя
Основные размеры сердечников статора и ротора и параметры обмоток электродвигателя 4А200L8У3 приведены в таблице 1.5.
Таблица 5 – Обмоточные данные электродвигателя 4А200L8У3; степень защиты IP44
| U1л, В | Dа1, мм; Di1, мм | l1, мм | δ, мм | z1; z2 | Паз статора | Паз ротора | |||||
| b1, мм; b2, мм | h, мм | e, мм; m, мм | b1, мм; b2, мм | h, мм | e, мм; m, мм | n, мм | |||||
| 220 / 380 | 349; | 0,50 | 72; 58 | 6,2; 8,4 | 25,7 | 1,0; 3,7 | 7,2; 3,5 | 39,0 | 1,0; 1,5 | 0,7 |
| Обмотка статора | Ротор | |||||||||
| Коротко – замыкаю –щее кольцо | Скос пазов, мм | |||||||||
| Вид | у | Sп | n; а | d, мм,
d', мм;
 , мм, , мм,
 , мм , мм
| kоб | lω, мм | r1(20), Ом | Gм, кг | ак, мм; bк, мм | |
| Двухслойная петлевая равносекционная | 1 – 8 | 19 + 19 | 1; 4 | 1,50, 1,58; 1,50, 1,58; | 0,902 | 0,195 | 14,5 | 16,0; 47,3 | — |
|
|
|
При выборе необходимо учитывать нормированную стоянку двигателя под током в течении 30 секунд, продолжительность непрерывной работы – 30 минут и степень защиты IP 56. Применение системы Г – Д может быть оправдано только в случаях, когда мощность электропривода выше 20% мощности судовой электростанции. Для мощных якорных брашпилей с повышенной глубиной стоянки рекомендуется также система Г – Д.
2.5.1. Расчёт и построение характеристик асинхронного двигателя
Для построения механических характеристик воспользуемся формулой Клосса с уточнённой формулой Чекунова:
 ,
,
где Sкр - критическое скольжение:
 ;
;
SН – номинальное скольжение:
 ;
;
ωс – синхронная угловая скорость поля статора:
f - частота тока питающей сети;
p – число полюсов;
λМ – перегрузочная способность по моменту:
 Н·м;
Н·м; 
 .
.
Подставляя в формулу Клосса значения S, заполняем таблицу:
Таблица 4 – Значения моментов и угловых скоростей
Первой скорости
| S | M | ω |
| 0,01 | 238,2 | 148,5 |
| SH =0,043 | 372,5937 | 143,55 |
| Sкр=0,159 | 144,6614 | 126,15 |
| 23,79858 |
Второй скорости
| S | M | ω |
| 103,66 | ||
| 0,01 | 238,2 | 102,6234 |
| SH = 0,01 | 238,2 | 102,6234 |
| Sкр = 0,037 | 388,4266 | 99,82458 |
| 23,79858 |
Третьей скорости
| S | M | ω |
| 0,01 | 238,2 | 74,25 |
| SH =0,044 | 369,5628 | 71,7 |
| Sкр = 0,164 | 140,5411 | 62,7 |
| 23,79858 |
По полученным данным строим механическую характеристику асинхронного двигателя серии МАП исполнения 4А250L8/6/4У3:
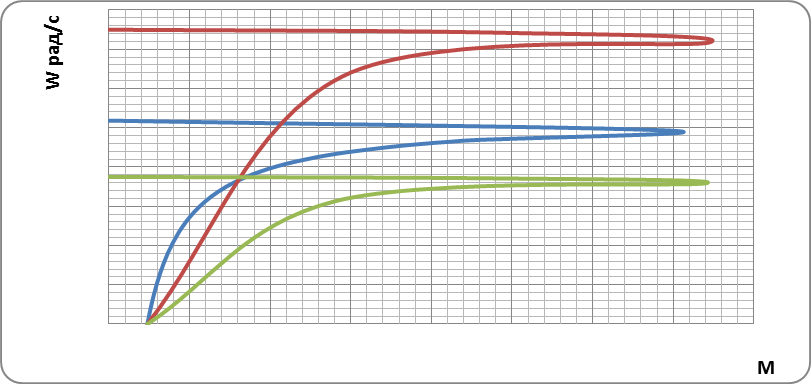
Рисунок 6. Механическая характеристика асинхронного двигателя серии МАП исполнения 4А200L8/6/4У3
Определяем скорость выбирания якорной цепи по стадиям:
 м/с;
м/с;
 м/с;
м/с;
 м/с;
м/с;
 м/с;
м/с;
 м/с.
м/с.
Продолжительность каждой стадии:
 с ≈ 12.8 мин;
с ≈ 12.8 мин;
 с;
с;
 с;
с;
 с ≈ 11 мин.
с ≈ 11 мин.
Расчётное значение полного времени съёмки судна с якоря:
 с ≈ 25 мин.
с ≈ 25 мин.
Средняя скорость съёмки судна с якоря:
 м/с.
м/с.
Время подъёма якоря висящего на полностью вытравленной цепи:
|
|
|
 с ≈ 24 мин.
с ≈ 24 мин.
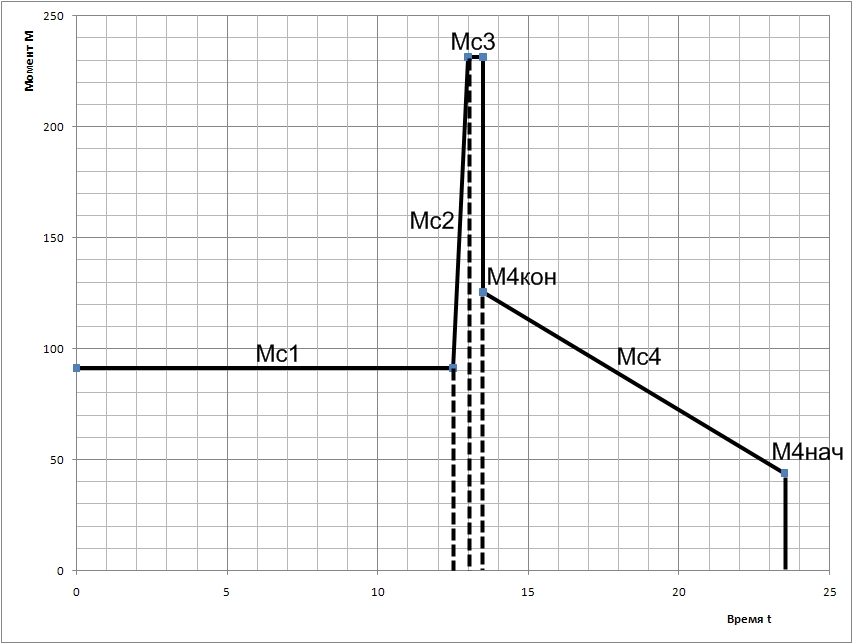
Рисунок 7. Нагрузочная диаграмма электропривода якорно-швартового устройства при съемке судна с якоря
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 1339; Нарушение авторских прав?; Мы поможем в написании вашей работы!