КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Полная механическая энергия: Состоит из кинетической и потенциальной энергии Е=Т+П
|
|
|
|
Если рассмотреть действие на тело различных сил то оказывается что при постоянной массе тела ускорение полученное телом пропорционально силе. Если рассматривать действие одной и тойже силы на различные тела то окажется что ускорение полученное этими телами будет прямо пропорционально величине обратной массе тела.
Скорость любого тела остается постоянной (в частности = 0) пока воздействие не данное тело другого тела не вызовет её изменения или можно сказать так: тело находящееся в состоянии покоя или в состоянии равномерного прямолинейного движения до тех пор пока на данное тело не действуют другие тела.
1 Закон Ньютона выполняется не во всех системах отсчёта. Предполагаем что некоторая система отсчёта движется в другой системе отчёта с некоторым ускорением, тогда тело покоящееся во второй системе отсчёта даже при отсутствии воздействия на данное тело со стороны других тел будет двигаться ускоренно относительно первой системы.
Исходя из этого Ньютоном выведено понятие инерциальной системы отсчёта и первый закон Ньютона можно сформулировать: Существуют такие системы отсчёта относительно которых тела движутся прямолинейно или находятся в состоянии покоя до тех пор пока на них не действуют другие тела. Эти системы называются инерциальными. Инециальных систем отсчёта бесконечно много. Всякая система отсчёта которая покоится относительно инерциальной системы отсчёта или находится в состоянии равномерного прямолинейного движения относительно инерциальной системы отсчёта является инерциальной.
Кроме инерциальных систем отсчёта существуют и не инерциальные системы отсчёта. Всякая система отчёта двигающаяся ускоренно относительно инерциальной системы отсчёта является не инерциальной. С большой степенью точности инерциальной можно считать гелиоцентрическую систему отсчёта, то есть систему отсчёта солнечную. Хотя если говорить строго наличие вращающихся планет вокруг солнца делает данную систему отсчёта не инерциальной. Но эффекты обусловленные данным эфектом сравнительно малы поэтому при решении многих задач такую систему счинают инерциальной.
|
|
|
2 закон Ньютона: ( основное начало динамики )
Масса тела – физическая величина количественно характеризует инертность тела. Инертностью тела называется способность тела противостоять внешнему воздействию.
Воздействие на тело со стороны других тел вызывает изменение скорости тела. Опыт показывает что одно и тоже воздействие сообщает различным телам различные по величине ускорения.

Для того чтобы определить массу тела необходимо сравнить массу данного тела с массой тела принятого за эталон. Определить массу тела можно следующим образом: Предполагаем что имеем две массы масса m1 – эталонная и создаем такую ситуацию, что тела взаимодействуют только между собой и не взаимодействуют с другими телами. При их взаимодействии первое тело получит изменение скорости DV1, а второе тело DV2. Опыт показывает что эти приращения противоположны по знаку их отношение не зависит от способа и интенсивности взаимодействия тел и относятся они как:
Таким образом найдя данное соотношение и зная m1 можно определить m2.
Сила – векторная величина являющаяся мерой механического воздействия на тело со стороны других тел или полей. В результате которого тело получает ускорение или меняет свою форму. Динамическим проявлением силя является получение телом ускорения. Статическим – изменение формы (Деформация тела). Сила в системе Си измеряется в Ньютонах.


|
|
|
Где: К – коэфициент пропорциональности; F – равнодействующая всех сил действующих на тело. (Геометрическая сумма всех сил действующих на тело).
В системе Си второй закон Ньютона можно записать в следующей форме: Сумма всех сил действующих на тело массой m равна произведению массы тела на ускорение.
 (1)
(1)
2 закон Ньютона выполняется лишь в инерциальной системе отсчёта так как только в инерциальной системе отсчёта при равенстве нулю равнодействующей ускорение тела будет равно нулю.
Данная запись второго закона Ньютона используется в классической механике. В механике малых масс (Квантовой механике) эта запись не принята второй закон Ньтона может записать и таком виде:

Введём понятие импульс тела. Импульсом называется произведение массы тела на скорость тела.

 (2)
(2)
Вторая форма записи второго закона Ньютона который гласит: Равнодействующая всех сил действующих на тело равно изменению импульса тела во времени.
Также можно записать:

 (2)’
(2)’
То есть величина Fdt получила название импульс силы
Изменение импульса равнодействующей всех сил действующих на тело равно изменению импульса тела на которое действует данная равнодействующая.
Принцип независимости действия сил: Если на тело действует одновременно несколько сил, то каждая из них сообщает телу ускорение определённое вторым законом Ньютона. Согласно этому принципусилы и полное ускорение тела можно раскладывать на составляющие.
3 закон Ньютона: Тела взаимодействуют с силами равными по величине и противоположными по направлению. На основание третьего закона можно сравнивать лишь силы приложенные к разным телам.

Таким образом для конкретного применения третьего закона Ньтона необходимо определить какие конкретно тела взаимодейсвуют и скаккими конкретно силами каждое из взаимодействующих тел действует на другое взаимодействующее тело.
Силы
Все силы кот орые действуют в природе в том числе при описании механического движения можно поделить на виды обусловленные типом взаимодействия которые приняты в современной физике. Различают следующие типы: 1) Гравитационная (обусловленная всемирным тяготением), сила тяжести 2) Электро магнитная (Обусловлена электрическим и магнитным полем) силы упругости и трения так как этот вид сил определяется межмолекулярным взаимодействием. 3) Сильное взаимодействие (ядерное взаимодействие обеспечивает связь частиц в атомном ядре) 4)Слабое взаимодействие (к данному виду взаимодействия относятся силы отвечающие за распад элементарных частиц)
|
|
|
Упругие силы
Под действием приложенных к телу сил всякое тело деформируется то есть изменяет свои размеры и форму если после прекращения действия внешних сил тело восстанавливает свои размеры и форму то деформация называется упругой. Деформация является упругой в том случае если сила приложенная к телу не превышает предела упругости определённого материалами тела и его формой.
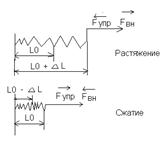
При изучении основ теории упругости всякое тело можно уподобить пружине на которую действуют внешние силы. Из опыта известно что если на тело действуют внешние силы F1 и F2 то из опыта тзвестно что DL пропорционально F где DL – абсолютное удлиннение пружины (деформация тела) то можно записать что:
F=k*ΔL (1)
где: К – коэфициент жёсткости пружины.
При внешнем воздействии на данную пружину пружину силой F в нутри пружины возникает натяяжение и любая чать пружины действует на другую часть силой определённой с помощью (1).
Если разрезать пружину попалам то та же сила будет возникать в каждой из половинок, но при абсолютном удлинении пружины в два раза меньше.
Для описания деформации рпужины удобно ввести относительное удлиннение которое определяется:

где: L0 – длинна пружины деформируемого тела при отсутстви внешнего воздействия. (В не деформируемом состоянии.
Сила пружины которая возникает внутри тела подчиняется закону Гука.

где: DL – перемещение некоторой материальной точки под действием внешних сил. Данное перемещение численно равно относительному удлиннению, знак минус говорит, что данное перемещение и силы упругости противоположно направлены.
Из опыта известно что относительное удлиннение:

где: a - коэффициент упругости податливости; S – площадь поперечного сечения деформируемого тела; F – внешняя сила.
|
|
|
В том случае если внешняя сила направлена по горизонтали сечения деформируемого тела, то величину F/S можно трактовать как нормальное напряжение тела.
 -Нормальное напряжение
-Нормальное напряжение

В том случае если F направлена по касательной к поверхности деформируемого тела то величину F/S называют тангенциальным напряжением.

Величина обратная коэфициенту упругости податливости называется модулем Юнга.

Следовательно относительное удлинение:

Из выражения (*) можно определить физический смысл модуля Юнга. Модуль Юнга равен такому нормальному напряжению пр и котором длинна деформируемого тела стержня (пружины) изменяется в двое (Относительно удлинения равного единице). Модуль Юнга является упругой характеристикой тела. Реально те напряжения которые равны модулю юнга не достижимы так, как при гораздо меньшем нормальным напряжении происходит разрушение деформиркемого тела.
Используя закон Гука можно получить взаимосвязь между коэффициентом упругости и модулем Юнга.





Закон Гука в котором фигурирует выражение для К справедливо только для упругой деформации. То есть после снятия внешнего воздействия тело восстанавливает свою форму. Все выше приведённые выводы были выведены для растяжения сжатия тоесть для такого вида деформации при котором тело меняет размер. Существует деформация сдвига. При деформации здвига тело меняет как размеры так и форму.
Деформация сдвига
Рассмотрим прямоугольный паралелепипед к противоположным граням которого приложены 2 силы F1 и F2 и в том случае если эти силы будут равномерно распределены по всей поверхности соответствующих граней то в любом сечении паралельном данным граням к которым прикладываются данные силы возникает тангенциальное напряжение.
где: S – площадь сечения.
При этом каждый воображаемый слой данного паралелограмма сдвигается относительно другого.

Данный вид деформации получил название деформация сдвига.
При упругих деформациях велечина сдвига мала поэтому можно записать что D=j.
Опыт показывает что между тангенциальным напряжением и величиной относительного сдвига существует взаимосвязь

где: s - модуль сдвига зависящий от свойств материалаиз которого изготавливают деформируемое тело. (Измеряется в паскалях)
Физический смысл модуля сдвига аналогичен модулю Юнга. Модуль сдвига равен такому тангенциальному напряжению при котором относительный сдвиг равен единице. (Тоесть при угле 45 градусов). Тоесть модуль сдвига является характеристикой упругости тела при деформации сдвига.
Сила тяжести вес тела
Под действием придяжения земли каждое тело в близи поверхности земли получет ускорение которое принято обозначать как ускорение свободного падения. g=9,8м/с²
Таким образом на всякое тело находящееся в поле тяготения земли дейсвует сила получившая название силы тяжести.

Очень часто силу тяжести путают с понятием вес тела – это различные понятия более того величина силы тяжести не равна весу тела весом тела называется сила с которой тело действует на опору или подвес таким образом сила тяжести прикладывает действие на само тело, вес тела действует на опору или подвес.
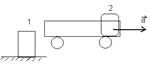
Определим вес тела массой m которое находится в движении в лифте движеещаяся вверх имеющее ускорение a. Для определения веса тела воспользуемся общим алгоритмом:
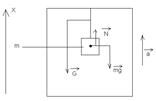

1) Определяем механическую систему куда входит движущееся тело и все тела взаимодействующие с ними. С помощью векторов изображаем силы действующие на движущиеся тела причём начало вектора должно находится на изображении тела на которое действует данная сила. Нужно помнить что каждое тело действует на другое только с одной силой. 2) В векторной форме записываем второй закон Ньютона для движущихся тел. 3) В векторной форме записываем третий закон Ньютона для системы взаимодействующих тел. 4) Полученная система векторных уравнений алгебраизируем путём проецирования на координатные оси предварительно выбранной системы отсчёта. Получается система уравнений для трёх неизвестных которые нужно определить в задаче. Если число уравнений не совпадает с числом неизвестных данную систему необходимо дополнить уравнениями записанными на основе физики.
Вес не равен силе тяжести, а равен только в случае когда тело движется прямолинейно или находится в состоянии покоя. На этом основан принцип взвешивания тел. Определить вес неподвижного тела относительно земли можно определив его массу сравнивая вес тела с весом эталонного тела.
Существуют ситуации когда вес тела (Сила с которой вес действует на опору или подвес) равен нулю это состояние получило название невесомости.
Сила трения
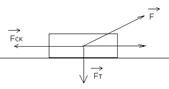
Силы трения проявляются при перемещении соприкасающихся тел или их частей относительно друг друга. Трение которое возникает при относительном перемещении двух соприкасающихся тел называется внешним трением. Трение которое возникает при перемешении частей одного и тогоже тела называется внутренним трением. Сила трения которая возникает при движении твёрдого тела в жидкости или газе относится к классу внутреннего трения поскольку в этом случае слои жидкости или газа соприкосаются с телом вовлекают в данное движение другие слои жидкости или газа и возникает трение между этими слоями. Трение между поверхностями твёрдых тел при отсутсвии смазки между ними относится с классу сухого трения. Трение между твёрдыми телами и жидкой или газообразной средой называется вязким. Сухое трение можно разделить на трение качения и трение скольжения. Силы трения направленные по касательным к трущимся поверхностям. При этом сила трения противополдожна относительному смещению этих поверхностей относительно друг друга. Как например если два слоя жидкости движутся относительно друг друга с различной скоростью то на слой движущийся с большей скоростью действует сила трения направленная против движения, а на слой движущийся с меньшей скоростью действует сила трения направленная по движению тела. В том случае если некоторое тело находится в состоянии покоя, то на него действует сила трения покоя.
Некоторое тело находится в состоянии покоя к нему прикладывают внешнюю силу F, тело продолжает оставаться в состоянии покоя это говорит о том, что тангенциальная составляющая силы по отношению к поверхности соприкосновения не превышает силу трения покоя. При увеличении силы F тело продолжает оставаться в состоянии покоя при этом автоматически увеличивается сила трения покоя действующая на тело. Когда внешняя сила превзойдет по величине максимальную силу трения покоя, то в этом случае тело начнёт двигаться, а сила трения покоя переходит в силу трения скольжения.
Максимальная сила трения скольжения может быть определена:

где: m - Коэффициент трения; N – сила реакции опоры.
Реально сила трения скольжения зависит от скорости, но эта зависимость не значительная и поэтому ей пренебрегают. Коэффициент трения зависит от при роды и состояния трущихся поверхностей. В случае трения скольжения он также зависит и от скорости. В случае гладких поверхностей начинает играть роль силы межмолекулярного взаимодействия между трущимися поверхностями и в этом случае сила трения может быть определена следующим образом.

где: mи – истинный коэфициент трения; N – Сила нормального давления со стороны поверхности; Р0 – Добавочное давление обусловленное силами межмолекулярного взаимодействия; S – площадь соприкосающихся поверхностей.
Сила трения может играть как положительную так и отрицательную роль в жизни и технике. Благодаря силе трения человек ходит по земле и колёса вращаются. При взаимодействии деталей сносятся механизмы. Отрицательное влияни трения можно уменьшить путём замены сухого трения на вязкое.
Вязкое трение: В отличие от сухого трения вязкое характерно тем, что сила вязкого трения образуется одновременно со скоростью. Поэтому как бы не была мала внешняя сила она может сообщить относительную скорость слоям вязкой среды. Вязкими средами являются жидкости или газы. Зависимость силы вязкого трения от скорости представлена на рисунке.

В данном случае изображена сила трения действующая на твёрдое тело движущееся в вязкой среде со скоростью V. При небольших скоростях сила трения пропорциональна скорости.

где: К – коэфициент силы трения.
Знак минус говорит о том что сила трения направлена противоположно трению.
При больших скоростях линейный закон зависимости силы трения от скорости переходит в квадратичный закон зависимости силы трения от скорости.
Энергия работа мощность.
Энергия – универсальное количество механического движения и взаимодействия всех видов материи с различными видами материи связывающей различные формы энергии. Поэтому можно говорить о механической энергии, тепловой электрических и магнитных полей. В одних процессах форма движения материи и соответствующая ей форма энергии не меняется так например при переходе тепла от горячего тела к холодному происходит перераспредиление тепловой энергии. В других случаях одна форма движения сопровождается переходом в другую форму движения при этом происходит переход одной формы энергии в другую. Так например при ударе молотом по наковальне механическая энергия переходит в тепловую. При вращении рамки во внешнем магнитном поле происходит переход механической энергии в энергию электрического поля. Изменение механического движение тела вызывается силами действующими на данное тело со стороны иных тел. Количественно процесс обмена энергией между взаимодействующими телами при механическом движении характеризуется с помощью понятия работа.
Предполагаем, что на некоторое тело действует внешняя сила F под действием силы тело получает ускорение, а со временем и скорость и в течении малого промежутка времени совершает перемещение DX.

При этом говорят, что внешняя сила F совершила работу по перемещению данного тела на величину DX.

Таким образом работа моделируется с помощью скалярной величины, и измеряется в (Дж)
В общем случае сила F в процессе движения может меняться как по величине так и по направлению поэтому удобно ввести понятие элементарной работы. Предполагаем, что F=f(x). Элементарная работа может быть определена так:

где: dX – элементарные перемещения совершаемые телом под действием данной силы F.
Для определения работы совершаемой силой F по перемещению тела под действием переменной силы F из точки О в точку имеющие координаты X необходимо просуммировать все элементарные работы совершаемые данной силой на участке прямой от О до X. Реально суммирование сводится к интегрированию и поэтому работа на данном участке определяется так:
При криволинейном движении работа в общем случае определяется следующим образом:


где: М – Координата начала движения; N – координата конца движения; dL – элементарное перемещение на криволинейном участке.
Из представленных выражений следует, что в том случае если угол между силой и перемещением является острым, то работа (элементарная работа) будет положительной и говорит о том, что сила совершает работу. В том случае если угол тупой, то работа (элементарная работа) отрицательна и говорит о том, что работа совершается против силы.
Мощность
Мощность – характеризует скорость совершаемой работы. В том случае если некоторая совершаемая работа DА совершена за время Dt, то средняя мощность за данное время Dt равна:

Единицы измерения мощности (Дж/с или Вт). В том случае если за одинаковые промежутки времени совершаются разные работы то удобно ввести понятие мгновенная мощность или мощность в данный момент времени.
Кинетическая энергия
Это мера механического движения тела она определяется работой которую нужно совершить что бы вызвать данное движение. Предполагаем, что некоторое тело находится в состоянии покоя на тело действует внешняя сила равнодействующая которой F сообщает телу ускорение. Поэтому можно записать второй закон Ньютона:

Под действием силы тело приобретает ускорение а со временем и скорость за малый промежуток времени dt совершается элементарное перемещение dS:
Учитывая что скорость V=dS/dt, а элементарная работа dA=FdS, переписываем уравнение в следующем виде:

Для того что бы за некоторое время t данному телу сообщить скорость V необходимо внешними силами совершить работу А, и данную работу можно трактовать как кинетическую энергию тела. Работа А будет равна сумме элементарных работ совершаемых силой за элементарный промежуток времени dt. Реально суммирование сводится к интегрированию.
При выводе выражения для кинетической энергии нами был использован второй закон Ньютона который справедлив в инерциальной системе отсчёта. В разных инерциальных системах отсчета движущиеся относительно друг друга скорости тела а следовательно его кинетическая энергия будет различной. Таким образом кинетическая энергия тела зависит от выбранной системы отсчёта.
Потенциальная энергия
Это часть общей механической энергии системы определяемая взаимным расположением тел и характером сил взаимодействия между телами. Потенциальная энергия вводится в том случае когда взаимодействие тел осуществляется по средствам силовых полей. Характерной особенностью которых является то, что их работа (работа сил этих полей) не зависит от формы траектории по которой движется тело под действием этих сил. Такие поля называются потенциальными, а силы действующие в них называются консервативными. Другой характерной особенностью потенциальных полей (консервативных сил определяющих эти поля) является то, что работа этих сил на замкнутом контуре равняется нулю. Свойство равенства нулю работы консервативной силы по замкнутому контуру следует непосредственно из того, что работа этих сил не зависит от траектории по которой под действием этих сил перемещается тело.
Математически консервативность некоторой силы действующем в потенциальном поле можно описать следующим образом:

Данная запись является интегральной формой представления консервативной силы F, тоесть она справедлива для некоторой макро области пространсва.
Для того что бы описать консервативность того или иного силового поля в микро области пространства (в точке) вводят операторы векторного анализа (Rotar) который может быть определён так:
где: S – площадь поверхности замкнутой контуром L
В декартовой системе координат (Rotar) можно записать следующим образом:
ïrot aï - это оператор векторного анализа. Это совокупность действующая под некоторой функцией в результате которой функция превращается в другую функцию. Он является векторным оператором и применяется к векторной функции. В результате действие это оператор на векторную функцию. Введя понятие ïrotï можем рписать консервативные силы действующие в потенциальном поле.
ïrot Fï=0 (*)
 (**)
(**)
Для того что бы доказать консервативность той или иной силы действующем в том или ином потенциальном поле нужно доказать что работа этой силы не зависит от формы траектории или, что работа этой силы на замкнутом контуре равна нулю. К консервативным силам относится сила тяжести, упругости, гравитационная, кулоновская. Кроме консервативных сил в природе встречаются не консервативные силы (диссипативные силы). Работа этих сил на замкнутом контуре не равна нулю. Работа этих сил зависит от формы траектории и работа этих сил на замкнутом контуре не равна нулю. К этим силам относится сила трения сила сопротивления сила стороны электрического поля при перемещении заряда в проводнике.
Потенциальная энергия тела находящаяся в потенциальном поле определяется с точностью до произведения постоянной, поэтому абсолютное значение потенциальной энергии зависит от выбора начала отсчета потенциальной энергии (от выбора нулевого уровня отсчёта потенциальной энергии, то есть того уровня где потенциальная энергия равна нулю). Выбор нулевого уровня при решении задач роли не играет так как в физических задачах нужно определить разность потенциалов энергий и зная вид потенциальной энергии определяют силу действующая в данном поле консервативных сил. Потенциальную энергию тела можно определить как работа которая совершает действие на его внешние силы преодолевая консервативные силы взаимодействия тела с потенциальным полем и перемещая данное тело из положения в котором потенциальная энергия равна нулю в то положение в котором потенциальная энергия принимает конечное значение. Исходя из данного определения потенциальной энергии можно установить взаимосвязь между потенциальной энергией и работой консервативных сил в поле которой тело обладает данной потенциальной энергией.
dП=-dА
где: dП – элементарные изменения потенциальной энергии П; dА – Элементарная работа в поле консервативных сил в поле которой тело обладает потенциальной энергией П.
Как было сказано выше характер потенциальной энергии и численных её коэффициентов определяет положение тела в поле консервативной силы и характером самой консервативной силы. Так тело находящееся в поле силы тяжести на высоте H от нулевого уровня отсчёта потенциальной энергии данного поля сил обладает потенциальной энергией.

Тело находящееся в поле силы упругости на расстоянии X от нулевого уровня отсчёта потенциальной энергии данного поля сил обладает потенциальной энергией.

где: К – жёсткость деформируемого тела.
Зная закон изменения потенциальной энергии в зависимости от координат можно установить зависимость изменения консервативной потенциальной силы от координат в поле которой тело обладает данной потенциальной энергией. Эту зависимость можно непосредственно установить из выражения

где: dr – элементарное перемещение; F – консервативная сила в поле которой тело обладает потенциальной энергией П. Это же выражение можно записать и в координатной форме.



Или можно записать по другому введя градиент. Градиент это оператор векторного анализа который действует на скалярную функцию и в результате его действия на скалярную функцию получается векторная функция. Градиент это вектор показывающий направление наибольшего изменения той скалярной функции на которую действует оператор градиент.
 (2)
(2)
где: 
Таким образом зная зависимость потенциальной энергии от координат можно определить зависимость поведенияч консервативной силы F от координат.
Соотношение (2) можно получить и иным образом оно следует из консервативности силового поля в котором действует сила F. Эта консервативность описывается так: rotF=0
Rot(gradП)=0
отсюда следует F=±gradП, учитывая что dA=-dП следует

Законы сохранения
Тела образующие механическую систему могут взаимодействовать как друг с другом так и с другими телами которые не в ходят в данную механическую систему. Поэтому силы действующие на тела системы можно разделить на внутренние и внешние. Внутренними называются такие силы которые действуют на тела системы со стороны тел входящих в данную механическую систему Внешними называются силы которые действуют на тела системы со стороны тел не входящих в данную систему. В том случае если внешние силы отсутствуют система называется замкнутой. Реально замкнутых систем не существует, но существуют ситуации когда внешними силами можно принебреч или внешние силы компенсируют друг друга и тогда можно считать систему условно замкнутой. Для замкнутых систем существуют такие функции координат и скорости тела которые могут не меняться в течении времени. Эти функции получили неазвание интегралов движения. Можно показать что для системы в n тел можно определить n-1 интегралов движения однако особый интерес представляют аддитивные интегралы движения. Для аддитивных интегралов движения справедлив принцип аддитивности или принцип суперпозиции. Согласно данному принципу для того чтобы определить интеграл движения всей системы необходимо разделить всю систему на подсистемы определить соответствующий интеграл движения каждой подсистемы, а результат интеграла движения всей системы определяется как алгебраическая или геометрическая сумма соответствующих интегралов движения подсистем входящих в данную систему. Таких интегралов движения для которых выполняется принцип аддитивности три. Это энергия, импульс и момент импульса. При определённых условиях для данных интегралов движения выполняются законы сохранения, тоесть при определённых условиях выше названные интегралы движения не меняются во времени.
Закон сохранения импульса
Рассмотрим систему состоящую из n тел (материальных точек)

Каждое из этих тел имеет массу mi. Эти тела взаимодействуют как друг с другом так и с телами не входящимии в данную механическую систему. Под действием сил действующих на данные тела каждое из тел в соответствии со вторым законом Ньютона получит ускорение, а со временем и скорость. Поэтому для каждого из тел входящих в в данную механическую систему можно записать второй закон Ньютона
Для первого тела 
+
Для второго тела 
+
Для n-го тела 
Где: Vi – скорость итого тела массой mi; Fi – равнодействующая всех внутренних сил действующих на тело массой mi; Fi’ – равнодействующая внешних сил действующих на тело массой mi.
Просуммируем уравнения системы и получим:
Учитываем, что mi*Vi=Pi, где Pi–импульс итого тела. Можно данное уравнения записать в следующем виде:
Так как импульс является аддитивной величиной то последние уравнение можно переписать
где: Р – суммарный импульс системы в соответствии с третьим законом Ньютона. Сумма всех внутренних сил действующих на тела данной системы равна нулю. Отсюда получает, что
 (*)
(*)
где: сумма  определяет равнодействующую всех внешних сил действующих на систему.
определяет равнодействующую всех внешних сил действующих на систему.
Из (*) можно увидеть условие при котором выполняется закон сохранения импульса. Импульс существует в том случае если равнодействующая всех внешних сил действующая на систему равна нулю (система замкнута) и будет оставаться постоянным. Таким образом закон сохранения импулься выполняется в замкнутой системе. Реально в природе замкнутых систем не существует, но систему можно считать замкнутой если выполняется хотябы один из представленных ниже случаев:
1) Внешние силы действуют на систему но они друг друга компенсируют.
2) Внутренние силы значительно больше внешних сил.
3) В проекции на некоторую ось равнодействующая внешних сил равна нулю. В этом слеучае сохнаняется лишь проекция импульса на эту ось.
Закон сохранения импульса (количество движения) справедлив не только для классической механики. Его можно применить как для механики больших скоростей так и для механики малых масс. Данный закон связан с однородностью пространства и заключается в том, что законы движения тел (и системы тел) не зависят от выбора системы координат.
В классической механике в виду независимости массы от скорости количество движения (импульс) тела может быть выражена через центр масс системы. Положение которого может быть определено следующим образом:
Рассмотрим систему состоящюю из n материальных точек имеющих массы mi.

Положение каждой материальной точки относительно системы отсчёта с центром в точке 0 определяется с помощью радиус вектора ri. Положение центра масс данной системы может быть определено следующим образом.


Таким образом центр масс можно трактовать как точку в которой сосредоточена вся масса тела и которая движется под действием внешних сил приложенных к данному телу (системе) так же как исамо тело (система) центр масс которой мы определяем. Скорость центра масс:
Так как сумма mi*Vi=Pi, где Pi – импульс итой частицы, а сумма  , где: P – импульс системы
, где: P – импульс системы
То есть импульс системы может быть определён как произведение массы системы на скорость центра масс.

С учётом введённой выше связи импульс системы и скорость центра масс системы

где: Fi – равнодействующая внешних сил действующая на внешние силы системы.
Из представленного выражения следует, что центр масс системы движется как материальная точка в которой сосредоточена вся масса данной системы и на которую действуют внешние силы действующие на данную систему. Из данного уравнения следует, что в случае замкнутой системы, когда равнодействующая всех внешних сил будет равна нулю, центр масс системы движется либо равномерно и прямолинейно либо находится в состоянии покоя.
Уравнение движения тела с переменной массой (уравнение реактивного движения)
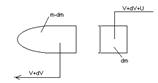
Движение некоторых тел сопровождается изменением их массы. Примером такого движения является движение ракеты, масса которой будет уменьшаться за счёт истечения газов образовавшихся при сгорании топлива данной ракеты. На простейшем эксперименте было установлено, что если система увеличивает свою массу в каком либо направлении, то она получае дополнительное количество движения (импульс) в противоположном направлении.
Рассмотрим составление уравнения реактивного движения на примере движения ракеты. Предпологаем что в момент времени ракета имеет массу m и скорость t. В течении времени dt ракета выбросила часть топлива массой dm и поэтому масса ракеты t+dt=m-dm, а скорость ракеты относительно инерциальной системы отсчёта стала равна V+dV. Предпологаем, что относительно ракеты массой m-dm, сгоревшее топливо массой dm движется с некоторой скоростью U, тогда скорость вытекающих газов массой dm относительно неподвижной системы отсёта может быть определена следующим образом: V+U+dV.
Импульс системы ракета – сгоревшие газы в момент времени t+dt может быть определён как:

В момент времени t импульс системы P=mV тогда dP за промежуток времени dt

Предпологаем что на данную систему действуют внешние силы ранодействуящая которой будет равна F тогда исходя из второго закона Ньтона.
Полученное уравнение получило название уравнеие движение тела с переменной массой или уравнение реактивного движения это уравнение называется уравнением Мещерского.  - реактивная сила.
- реактивная сила.
Закон сохранения энергии
Определим условия при котором сохраниться такой аддитивный интеграл движения как энергия. Рассмотрим систему n частиц (n материальных точек) кахддая из которых имеет свою массу mi. Дод действием всех сил действующих на данную систему каждая частица получает ускорение, а со временем и скорость. Тогда для каждой частицы представленной системы можно записать основное начало динамики.
 (*)
(*)
где: mi – масса итй частицы; Vi - скорость итой частицы;  - равнодействующая внутренних консервативных сил действующих на итую частицу;
- равнодействующая внутренних консервативных сил действующих на итую частицу;  - равнодействующая внутренних диссипативных сил дейсвующи на итую частицу;
- равнодействующая внутренних диссипативных сил дейсвующи на итую частицу;  - равнодействующая внешних консервативных сил действующих на итую частицу;
- равнодействующая внешних консервативных сил действующих на итую частицу;  - равнодействующая внешних диссипативных сил действующих на итую частицу.
- равнодействующая внешних диссипативных сил действующих на итую частицу.
Получив скорость за малый промежуток времени dt каждая из частиц системы совершае перемещение dSi. Помножив левую и правую часть уравнения (*) на соответствующее dSi. Получим следующую систему уравнений.
 (**)
(**)
Систему (**) можно преобразовать в виде следующих обозначений:
где: dTi – элементарное изменение кинетической энергии итой частицы за бесконечно малый промежуток времени dt.

Последнее выражение получилось из представленного ранее выражения.
dAk=-dП
где: dAk – элементарная работа консервативных сил; dП – элементарное изменение потенциальной энергии в поле этих консервативных сил. Поэтому dПi можно определить как элементарное изменение потенциальной энергии итого тела в поле внутренних консервативных сил.

где:  - элементарная работа внутринних диссипативных сил
- элементарная работа внутринних диссипативных сил
где: dПi’ – элементарное изменение потенциальной энергии тела с номером i в поле внешних консервативных сил.
где:  - элементарная работа внешних диссипативных сил.
- элементарная работа внешних диссипативных сил.
С учётом введённых обозначений систему (**) перепишем:
 (***)
(***)
Почленно сложив уравнения данной системы получаем

Введя обозначения:

где: dT – элементарное изменение кинетической энергии системы; dП – элементарное изменение потенциалдьной энергии системы в поле внешних консервативных сил.;  - элементарная работа внутренних диссипативных сил по перемещению тел в системе;
- элементарная работа внутренних диссипативных сил по перемещению тел в системе;  - элементарная работа внешних диссипативных сил по перемещению тел в системе
- элементарная работа внешних диссипативных сил по перемещению тел в системе
С учётом введённых обозначений получим следующее уравнение:
 (1)
(1)
где: dП0 – элементарное изменение потенциальной энергии системы в поле внешних и внутренних консервативных сил. Из полученного уравнения (1) следует условие сохранения полной механической энергии. Полная механическая энергия будет сохраняться только в консервативной потенциальной системе. Консервативной потенциальной системой называется система в которой действуют только консервативные силы.
dT+dП=0 (1’)
d(T+П)=0 (1’’)
В том случае если в системе действуют только консервативные силы уравнение 1 преобразуется к виду 1’ или к виду 1’’.
Из этих уравнений следует что полная механическая энергия системы:

является величиной постоянной. Из уравнения 1 следует, что в случае не консервативной системы в которой действуют диссипативные силы.
При действии в системе не консервативных сил в случае диссипативной системы выполняется закон сохранения полной механической энергии при этом часть механической энергии переходит в другие виды энергии например в тепловую. Та часть энергии которая переходит в иные виды энергии численно равны работе диссипативных сил. Таким образом энергия ни когда не может исчезнуть, а может перейти в иные виды энергии. (1) – является записью закона сохранения полной механической энергии в дифференциальной форме в случае бесконечно малых изменений. (1’) или (1’’) – является записью закона сохранения механической энергии в дифференциальной форме. При решении задач удобно пользоваться записью законов в интегральной форме. При макро перемещении тел в больших областях пространства. От интегральной к дифференциальной можно перейти. DП – изменение потенциальной энергии при перемещении тела из некоторого положения 1 в положение 2.


где: DТ – изменение кинетической энергии при перемещении тела из положения 1 в положение 2.
 и
и  - работа внутренних и внешних диссипативных сил по перемещению тела системы из положения 1 в положение 2. С учётом введённых обозначений закон сохранения полной энергии.
- работа внутренних и внешних диссипативных сил по перемещению тела системы из положения 1 в положение 2. С учётом введённых обозначений закон сохранения полной энергии.
 (2)
(2)
DТ+DП=0 (3)
Закон сохранения механической энергии связан с временной инвариантностью физических законов. Тоесть с независимостью действия этих законов от выбора начала отсчёта времени.
Тело падающее с некоторой высоты будет находиться в процессе движения определённое время независимо от того когда это движение началось.
Закон сохранения механической энергии (сил (1’) и (3)) можно трактовать как закон сохранения импульса. Превращение механической энергии в случае консервативной системы происходит перераспределение механической энергии между её составляющими. Говорит о том что потенциальная энергия переходит в кинетическую и наоборот.
Все действующие системы являются диссипативными поэтому закон сохранения механической энергии не выполняется он является физической абстракцией. Закон сохранения полной энергии в природе выполняется так как часть механической энергии переходит в энергию других видов, однако в случае малых диссипативных сил закон сохранения полной энергии можно трактовать как закон сохранения механической энергии.
Тело поднято на высоту H и с неё начинает спускаться. Систему можно считать консервативной так как на тело действует только консервативная сила тяжести. Запишем закон сохранения энергии для данной системы.

DП+DТ=0
где: DТ – полное изменение кинетической энергии тела при движении тела из положения 1 в положение 2.
DП =П2-П1
DТ =Т2-Т1
Прежде чем описать движение тела выбираем нулевой уровень потенциальной энергии, тоесть тот уровень где потенциальная энергия равна нулю.
DП =0-mgh
DТ =mV²/2
-mgh+ mV²/2= mV2²/2=-mgh
Для определения скорости в точке X можно воспользоваться графическим методом. Потенциальная энергия системы будет изменяться по линейному закону. Определяем по графику точку X0, кинетическую энергию в этой точке можно определить как: Т(X0)=Е-П(X0)

Деформация (упругое тело)
Предпологаем, что некоторое тел массой m находится на пружине жёсткостью к пружина растянута на max величину X0, таким образом тело в поле силы упругости обладает потенциальной энергией (кx²)/2, пружина начинает сокращаться и тело начинает двигаться вверх при этом при этом приобретает скорость V, следовательно в некоторый момент времени тело будет обладать кинетической энергией и эта энергия может быть определена как:
Т=Е-Пx
Где: Пх – потенциальная энергия тела в поле упругой силы в той точке где тело имеет кинетическую энергию Т.
Т=П-Пх
Где: х – абсолютное удлиннение пружины.
Кинетическую энергию можно определить и графически, построить график потенциальной энерги о X и определить потенциальную энергию в точке X.

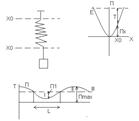
Рассмотрим зависимость потенциальной энергии от координат. Предпологаем что зависимость потенциальной энергии некоторого тела в поле консервативных сил выглядит так как показано на рисунке. Е – полная механическая энергия системы. Выделим три характерные области 1, 2, 3. В област 2 тело находиться не может так как потенциальная энергия тела превосходит полную механическую энергию тела и следовательно и следовательно кинетическая энергия тела дорлжна быть отрицательной. Для того что бы телу перейти из области 1 в область 3 ему необходимо преодолеть потенциальный барьер высотой Пmax что тело может сделать если ему сообщить дополнительную энергию равную разности Пmax-E.
В класической механике: тело обладает энергией Е<Пmax и преодолеть потенциальный барьер преодолеть не может.
В квантовой механике: частица обладающая энергией Е<Пmax может преодолеть потенциальный барьер как бы пройдя по тонелю в нутри данного барьера.
Таким образом при заданном соотношении потенциальной энергии и полной механической энергии частица (тело) может двигаться лишь внутри области 1. Частица находится внутри потенциальной ямы шириной L глубиной П1.
Абсолютно упругие и не упругие удары
Ударом называется кратковременное взаимодействие двух или более тел. При ударе возникают столь значительные внутренние силы взаимодействия тел, что данные силы превосходят по величине внешние силы действующие на систему, а поэтому систему соударяющихся тел можно считать замкнутой. Сущность удара заключается в преобразовании кинетической энергии относительно движения соударяющихся тел в энергию упругой деформации тел при этом в процессе удара происходит перераспределение энергии между соударяющимися телами. Реально для ударов всегда выполняется соотношение V’<V где V’ – относительная скорость соударения тел после удара. V – до удара. ИЭто объясняется тем что в реальной ситуации часть полной механической энергии переходит в энергию тепловую.
d=V’/V – коэфициент восстановления.
Для реальных ударов величина d<1. Предельными являются случаи d=0 и d=1. В случае когда величина d=0 имеем абсолютно не упругий удар (АНУ). d=1 – соответствует случаю абсолютно упркгого удара (АУУ). Характерной чертой АНУ является то, что тела после соударения движутся вместе как одно целое. Примером удара близкого к абсолютно не упрукгому удару является движение двух пластилиновых шаров. Характерной чертой АУУ является то что после соударения в общем случае тела движутся в разные стороны с различными скоростями. При АУУ после соударения не остаётся ни каких остаточных деформаций соударяющихся тел и все кинетические энергии системы до удара преобразуются в кинетические энергии после удара. Это объясняется тем что внутренне силы возникающие в процессе соударения при АУУ по своей природе близки силам упругости, а поэтому система является консервативной (или потенциальной). Для потенциальной системы выполняется закон сохранения механической энергии.
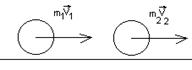
Рассмотрим пример АУУ на случае соударения двух шаров движущихся в одном направлени с различными скоростями.
 |
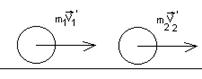 |
После соударения мела движутся со скоростью V1’ и V2’ соответственно.
Для описания движеничя шаров применим закон сохранения импулься (система является замкнутой так как внутринние силы значительно превосходят внешние силы), а также закон сохранения механической энергии.
Суммарный импульс системы за бесконечно малый прмежуток времени до удара равен суммарному импульсу системы через бесконечно малый промежуток времени после удара.
m1V1+m2V2=m1V1’+m2V2’
Так как система является консервативной то для неё можно применить закон сохранения энергии.
DT+DP=0
где: DT=Т2-Т1=
DT - изменение кинетической энергии в процессе удара. Т2– кинетическая энергия системы после удара. Т1 – кинетическая энергия системы до удара.
Так как в поле консервативных сил тела за малый промежуток времени не меняют в процессе удара своего положения поэтому DP (иэменение потенциальной энергии равно нулю). Отсюда следует что закон сохранения механической энергии преобразуется в закон сохранения энергии кинетической. Таким образом исходя из закона сохранения импульса и закона сохранения механической энергии получилась следующая система:
ß

ß
Решая полученную систему двух уравнений относительно двух неизвестных получаем выражение скорости первого и второго шара после удара:
АНУ
При АНУ в прцессе соударения возникают внутринние силы которые по своей природе близки к силам трения поэтому в процессе удара система является не консервативной и следовательно для данной системы не выполняется закон сохранения механической энергии, но выполняется закон сохранения полной энергии. Часть механической энерги переходит в иные виды энергии например тепловую.
Рассмотрим пример АНУ в случае взаимодействия двух тем с массами m1 и m2 которые движутся в одном направлении причём первое со скоростью V1 а второе со скоростью V2. Так как внутринние силы значительно больше внешних сил система является замкнутой и для неё применим закон сохранения импульса.
m1V1+m2V2=(m1+m2)V
где: V – скорость соударения тел после удара
В том случае если шары будут двигаться на встречу друг другу, то закон сохранения импульса в векторном виде при m1>m2 может быть записан так:

где: К0 – единичный вектор направленный вдоль скорости V1.
Определим ту часть механической энергии которая в процессе соударения переходит в другие виды энергии. Данная часть полной механической энергии которая переходит в иные виды энергии определяется для случая движения шаров в одном направлении.
Q=DT=Т2-Т1
DT – изменение кинетической энергии системы в процессе соударения. Т2 – кинетическая энергия после удара Т1 – кинетическая энергия до удара.
Знак минус говорит о том что кинетическая энергия до удара переходит в кинетическую энергию после удара.
Ранее были рассмотрены случаи центрального удара то есть удара при котором скорость соударения тел до удара направлена по прямой соединяющей их центры масс. Реально в природе наблюдаются и не центральные удары, то есть такие удары у которых вектора скорости не лежат на одной прямой. В этом случае исследование такого вида движения производится по такой же методике как и в случае центрального удара, но необходимо при записании законов произвести проецирование векторов скорости на координатные оси предварительно выбранной системы отсчёта и записать уравнение законов сохранения импульса и энергии в проекции на данные оси.
Закон сохранения момента импульса
Рассмотрим вращение абсолютно твёрдого тела отностельно оси. Выберем точку наблюдения 0 и привяжем к ней систему координат. Угловая скорость будет направлена вверх. Рассмотрим некоторую точку находящююся на данном теле вращения положение которой относительно точки 0 определяется с помощью радиус вектора Ri.
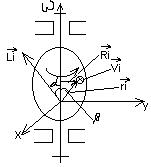 |
V=[w*Ri]
Данная точка имеет линейную скорость V.
Введём понятие момента импульса материальной точки относительно точки наблюдения 0. Момент импульса равен векторному произведению ri на Pi где P – импульс итой материальной точки (точка а)
Li=[ri*Pi]
Pi=mi*Vi
Mi - масса итой точки.
Из представленного выражения для момента импульса Li можно определить направление вектора Li. Направленеи определяется с помощью правила правой тройки.
Учитывая что вектора ri и Vi взаимно перпендикулярны, то модуль вектора Li можно определить
ïLiï=ri*mi*Vi=ri*mi*w*Ri
R – расстояние от оси до данной материальной точки.
V=w*ri*sinb=w*Ri
Определим проекцию вектора Li на ось Z
Lz=Li*cosa=mi*ri*wRi*cosa=mi*w*Ri²
Где: a - угол между вектором Li и осью Z
Момент импульса является аддитивным интегралом движения. Это значит что для нахождения момента импульса всей системы нужно данное тело разбить на части (на подсистемы) определить момент импульса каждой подсистемы, а момент импульса всего тела определяют как сумму моментов импульсов всех подсистем. Поэтому проекция момента импульса на ось Z всего тела будет равна сумме Lzi.

где: n – число подсистем данной системы.
Учитывая что ось не подвижна значит каждая точка тела имеет одинаковую угловую скорость.
Величина  получила название момента инерции тела. Это мера инертности при вращптельном движении. Эта величина зависит не только от массы тела (от масс mi материальных точек образующих данное тело), но и от расположения данной массы относительно оси вращения. Момент инерции относительно оси вращения. За распределение массы материальной точки относительно оси вращения отвечает расстояние Ri от оси вращения до материальной точки фигурирует в выражении для момента инерции.
получила название момента инерции тела. Это мера инертности при вращптельном движении. Эта величина зависит не только от массы тела (от масс mi материальных точек образующих данное тело), но и от расположения данной массы относительно оси вращения. Момент инерции относительно оси вращения. За распределение массы материальной точки относительно оси вращения отвечает расстояние Ri от оси вращения до материальной точки фигурирует в выражении для момента инерции.
Величину mi*Ri² можно определить как момент инерции итой материальной точки. Таким образом проекция момента импульса тела на ось Z определяется как
Lz=I*ω
Где: L - момент импульса тела; ω – угловая скорость тела вращения; I – момент инерции данного тела относительно неподвижной оси вращения.
Ось симетричным называется такое тело у которого ось вращения (неподвижная) является осью симметрии. Однородным называется такое тело у которого плотность вовсех точках будет одинаковой. Для всех остальных тел в общем случае L не сонаправлен с угловой скоростью и имеет место совпадение направлений составляющих вектора L вдоль оси вращения и угловой скорости. Определим условие при которых момент импульса тела вращения сохраняется во времени. Для простоты рассмотрим случай ось симметричного однородного тела, хотя условия сохранения момента импульса тела полученные на данном примере могут быть применимы к любым другим телам.


Продифференцируем момент импулса.
где: mi*ai – равнодействующая всех внешних сил действующих на итую татериальную точку. Величина Mi=[ri*Fi]
|
|
|
|
|
Дата добавления: 2013-12-12; Просмотров: 1915; Нарушение авторских прав?; Мы поможем в написании вашей работы!