КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Аналітичний метод
|
|
|
|
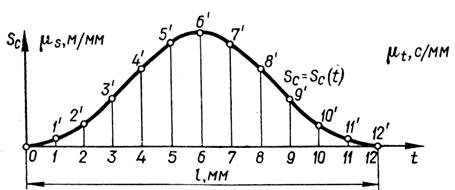
Метод діаграм
Для визначення характера переміщення веденої ланки (рис. 2.2 а) використовують діаграму. На осі абсцис (рис. 2.2 б) в масштабі  відкладають час одного цикла. При сталій швидкості обертання
відкладають час одного цикла. При сталій швидкості обертання  . По осі ординат відкладають лінійне переміщення
. По осі ординат відкладають лінійне переміщення  веденої ланки в масштабі
веденої ланки в масштабі  або кутове переміщення
або кутове переміщення  в масштабі
в масштабі  для механізмів, у яких ведена ланка обертається. Таким чином отримаємо функцію
для механізмів, у яких ведена ланка обертається. Таким чином отримаємо функцію  . В якості початку відліку можна вибрати одне з крайніх положень веденої ланки. Метод має невисоку точність визначення переміщення.
. В якості початку відліку можна вибрати одне з крайніх положень веденої ланки. Метод має невисоку точність визначення переміщення.

|
| а |
|
| б |
| Рис. 2.2 |
Метод має високу точність, застосовується при обчисленнях на ЕОМ, приводить до громіздких обчислень.
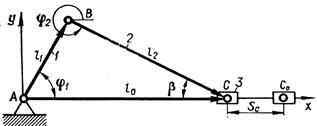
Використовується спосіб складання умови замкнутості всіх закритих контурів механізму (кожна ланка розглядається як вектор, а замкнутий контур - як векторний багатокутник (рис. 2.3)).
|
| Рис. 2.3 |
Рівняння замкнутості:


Це рівняння можна представити рівнянням проекцій векторів на систему координат хАу (початок системи координат знаходиться на осі обертання кривошипа А) у вигляді:
де  ,
,  - кути, які утворені ланками 1 та 2 із віссю Ах;
- кути, які утворені ланками 1 та 2 із віссю Ах;  та
та  - довжини ланок 1 та 2;
- довжини ланок 1 та 2;  - положення ланки 3.
- положення ланки 3.
Використовуючи геометричні співвідношення контуру АВС отримаємо
Враховуючи залежність для , одержимо рівняння переміщення веденої ланки:

При інтегруванні:
 ,
,
 - аналог кутової швидкості.
- аналог кутової швидкості.
|
|
|
|
|
Дата добавления: 2013-12-14; Просмотров: 325; Нарушение авторских прав?; Мы поможем в написании вашей работы!