КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Введение прямой связи
|
|
|
|
Введение связей по входу и возмущению
В системах, использующих принцип управления по ошибке, порядок астатизма может быть увеличен в основном за счет увеличения числа интегрирующих звеньев. Однако обеспечение устойчивости систем с большим числом интегрирующих звеньев представляет собой трудную задачу.
Более удобным способом повышения порядка астатизма является введение дополнительных связей по возмущению и по входному сигналу, т.е. переход к системам c двумя степенями свободы, использующим комбинированный принцип управления. Такие дополнительные связи не влияют на устойчивость системы. При их включении характеристическое уравнение замкнутой системы не меняется. Поэтому в подобных системах можно повышать порядок астатизма, не затрагивая условий устойчивости.
Для повышения качества САУ, в частности точности работы системы в установившемся режиме, наряду с обратной связью, которая является непременным атрибутом систем с одной степенью свободы, используют прямую связь по входному сигналу (по задающему воздействию). При этом
получают закон управления с прямой и обратной связью
 ,
,
который приводит к системе с двумя степенями для f=s=0 (см. рисунок ниже).
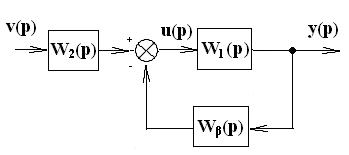
Здесь  - ПФ прямой связи,
- ПФ прямой связи,  - ПФ обратной связи,
- ПФ обратной связи,  -ПФ ОУ. Прямую связь называют также предварительным фильтром (feedforward).
-ПФ ОУ. Прямую связь называют также предварительным фильтром (feedforward).
Введение прямой связи за счет выбора ПФ позволяет добиться в принципе выполнения условия (49) абсолютной инвариантности системы к задающему воздействию,

 = 0,
= 0,
где  -ПФ замкнутой системы по ошибке,
-ПФ замкнутой системы по ошибке,
- ПФ замкнутой системы (системы с двумя степенями свободы) по задающему воздействию. Так как условие (49) можно записать в виде
 =1,
=1,
то система с прямой и обратной связью будет абсолютно инвариантной по отношению к задающему воздействию, если мы выберем прямую связь согласно выражению
|
|
|
 ,
,
которое можно записать как
 . (*)
. (*)
Однако реализовать условие (*) практически не удается. Дело в том, что
ПФ ОУ
 ,
,
как правило, является строго физически осуществимой, т.е. для нее
 Следовательно, инверсная ПФ ОУ
Следовательно, инверсная ПФ ОУ  оказывается физически неосуществимой, отсюда физически неосуществима прямая связь (*) и следовательно, невозможно реализовать абсолютно инвариантную систему с помощью прямой связи.
оказывается физически неосуществимой, отсюда физически неосуществима прямая связь (*) и следовательно, невозможно реализовать абсолютно инвариантную систему с помощью прямой связи.
Однако аппроксимация ПФ, определяемой (*), в целом ряде случаев позволяет добиться более высокого качества, чем при использовании только одной обратной связи.
В частности можно построить астатическую систему (систему селективно инвариантную к постоянному входному сигналу), не вводя интеграторы в замкнутый контур и тем самым не оказывая влияние на устойчивость системы. Пусть в отсутствие прямой связи, т.е. при =1, система с обратной связью является статической по отношению к задающему воздействию, так что коэффициент статической ошибки

и сама статическая ошибка  Введем прямую связь и выберем ПФ
Введем прямую связь и выберем ПФ
=
Тогда в соответствии с (2) находим
и следовательно,  =0, и мы получаем астатическую систему с прямой и обратной связью. Прямая связь является внешней по отношению к замкнутому контуру и не влияет на устойчивость системы, если она сама устойчивая, что можно отнести к достоинствам прямой связи. Однако полученная рассмотренным путем астатическая система не является робастной к изменению параметров ОУ. Изменение передаточной функции ОУ приводит к нарушению условий астатизма в отличие от метода обеспечения астатизма системы путем введения интеграторов в контур управления.
=0, и мы получаем астатическую систему с прямой и обратной связью. Прямая связь является внешней по отношению к замкнутому контуру и не влияет на устойчивость системы, если она сама устойчивая, что можно отнести к достоинствам прямой связи. Однако полученная рассмотренным путем астатическая система не является робастной к изменению параметров ОУ. Изменение передаточной функции ОУ приводит к нарушению условий астатизма в отличие от метода обеспечения астатизма системы путем введения интеграторов в контур управления.
В общем случае система с двумя степенями свободы проектируется вначале как система без прямой связи, т.е. при v(t)=0. Обратная связь выбирается так, чтобы достигнуть должного ослабления влияния возмущающего воздействия, робастности к изменению параметров ОУ и малого усиления шума измерения. Последние два требования связаны с требованием достаточно узкой полосы пропускания системы. Далее мы можем спроектировать прямую связь (предварительный фильтр) так, чтобы расширить полосу пропускания и тем самым лучше воспроизвести изменения в задающем воздействии. Прямую связь можно трактовать как фильтрацию задающего воздействия, и она не влияет на свойства системы с точки зрения ослабления эффекта возмущений и шума измерения.
|
|
|
Выбор прямой связи (продолжение)
Мы показали в предыдущей лекции, что за счет выбора ПФ прямой связи можно обеспечить, астатизм системы по задающему воздействию. Применительно к другой структуре с прямой и обратной связью (рис. ниже), которая более естественно связана с формированием разомкнутой системы, это условие принимает вид
 .
.
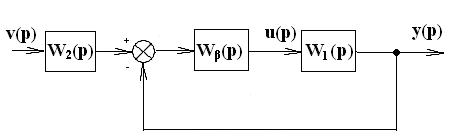
Заметим, что мы возвращаемся к традиционному обозначению -для регулятора (устройства обратной связи) и для прямой связи. Более продвинутой альтернативой является ПФ
с некоторой подходящей постоянной времени  и достаточно большим значением d таким, чтобы сделать прямую связь физически осуществимой.
и достаточно большим значением d таким, чтобы сделать прямую связь физически осуществимой.
Пример. Пусть
Тогда
 .
.
Интересно отметить, что при этом ПФ
 ,
,
связывающая управление и задающее воздействие, не зависит от ПФ регулятора , причем  =1 и
=1 и  =1/
=1/ . Постоянная
. Постоянная  выбирается так, чтобы |u(t)| не превышала допустимой величины uдоп.
выбирается так, чтобы |u(t)| не превышала допустимой величины uдоп.
В последнее время применяют продвинутую форму прямой связи, комбинированную прямую связь, которая представляет собой комбинацию двух прямых связей (см. рис. ниже) с ПФ Mu (p) и My (p).
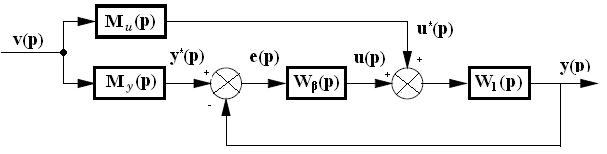
Заметим, что Mu(p) и My(p) можно трактовать как генераторы желаемого выхода (управлямой величины)  и управления
и управления  , которое соответствует .
, которое соответствует .
ПФ, связывающая e(p) и v(p),
 ,
,
где S(p)=1/[1+  . Чтобы система идеально воспроизводила желаемый выход , т.е. чтобы ошибка
. Чтобы система идеально воспроизводила желаемый выход , т.е. чтобы ошибка
e(p)= - y(p)=  v(p)
v(p)
была равна нулю, требуется обеспечить равенство
 .
.
|
|
|
Дата добавления: 2014-01-07; Просмотров: 616; Нарушение авторских прав?; Мы поможем в написании вашей работы!