КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Логические нелинейные законы управления
|
|
|
|
Нелинейные законы управления могут иметь иные формы, которые реализуются с помощью не функциональных, а более или менее сложных логических устройств. Например, в системе на рис. 19.4 логический нелинейный закон управления может быть применен для экономии управляющих воздействий со стороны системы управления на объект (а также экономии расхода энергии на нужды управления).
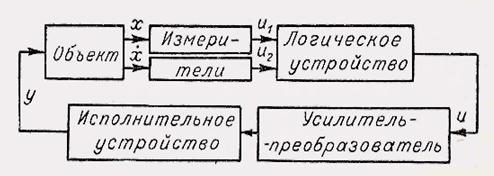
Рисунок 19.4.
Построение простейшего логического нелинейного закона управления лучше всего пояснить на плоскости двух входных величин и1, и2 (рис.19.5). Последние соответствуют отклонению х и скорости отклонения х’ регулируемой величины.
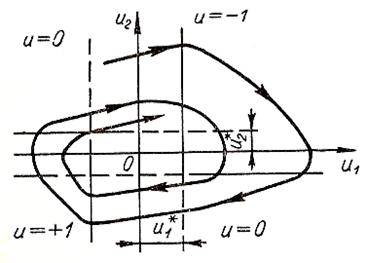
Рисунок 19.5
Управляющее воздействие (и = + 1 или и = ‑ 1) включается только тогда, когда  , т. е. когда отклонение достаточно велико, и
, т. е. когда отклонение достаточно велико, и  имеет знак, одинаковый со знаком
имеет знак, одинаковый со знаком  или противоположный, но при малом
или противоположный, но при малом  . Во всех остальных случаях управление выключено (и = 0), так как при противоположных знаках и и достаточной величине
. Во всех остальных случаях управление выключено (и = 0), так как при противоположных знаках и и достаточной величине  система сама без управления возвращается к требуемому положению х = 0 (если при этом гарантирована противоположность знаком х и х’) (рис.19.4).
система сама без управления возвращается к требуемому положению х = 0 (если при этом гарантирована противоположность знаком х и х’) (рис.19.4).
Логические нелинейные законы управления могут быть связаны также с изменением структуры системы управления. Например, при помощи логического устройства можно включать и выключать сигналы управления по первой и второй производной и по интегралу (рис.19.6) в зависимости от сочетания значения отклонения регулируемой величины х и скорости отклонения ее х’. При этом можно существенно повысить качество работы системы управления.
Вместо комбинирования указанных на рис. 6 линейных членов закона управления могут вводиться также и функциональные нелинейные члены, включение и выключение которых производится при помощи логического устройства. Тогда получится комбинация функциональных и логических нелинейных законов управления.
|
|
|
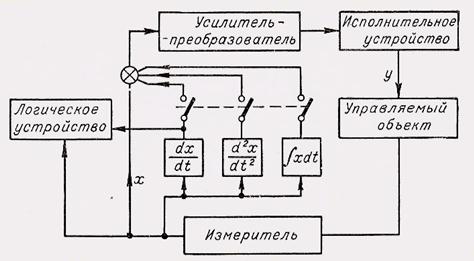
Рисунок 19.6
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 277; Нарушение авторских прав?; Мы поможем в написании вашей работы!