КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Резервирование, как средство повышения безотказности
|
|
|
|
Тема 7. Использование методов резервирования источников энергии, трактов управления и исполнительных механизмов для повышения безотказности систем автоматизированных электрогидравлических приводов.
1.Понятие о показателях надёжности рулевых приводов.
Рассматривая способы обеспечения требуемой надёжности систем приводов, которые являются одним из важнейших их показателей качества, необходимо рассмотреть некоторые стандартизованные определения качественных показателей, определяющих надёжность изделий. Показатели надёжности широко используются в международных сертификационных документах изделий машиностроения, и поэтому для однозначного понимания смысла этих показателей мы приводим определение основных показателей на русском и английском языках [7.1].
Надежность (Dependability) систем приводов. В соответствии с ГОСТ 13377-75 определяется, как свойства изделия выполнять заданные функции, сохраняя во времени значения установленных показателей в заданных режимах эксплуатации. Надежность определяется безотказностью, долговечностью, ремонтопригодностью и сохраняемостью изделий.
Безотказность (Reliability) – свойство системы непрерывно сохранять работоспособность в течение некоторого времени (наработки).
Долговечность (Longevity) – свойство системы сохранять работоспособность до наступления предельного состояния (при определенном техническом обслуживании).
Отказ (Failure) системы – событие, состоящее в нарушении ее работоспособности, т.е. в нарушении соответствия всем требованиям к основным функциям и параметрам.
Неисправность (Demage) – несоответствие изделия хотя бы одному из требований, предъявляемых к системе.
|
|
|
Безотказность системы приводов обычно относят к определенной наработке, например, к одному полету или к одному часу полета.
Предельное состояние (Marginal State) наступает после отработки назначенного ресурса, при этом в процессе отработки могут производиться ремонты с заменой вышедших из строя деталей. Назначенный ресурс, оцениваемый в часах, устанавливается с учетом экономичности, безопасности и морального износа изделия с учетом его технического обслуживания.
Вероятность безопасной работы (Survival Probability) изделия в заданном интервале времени 0- t0:
P {τ > t0} = P (t0 ) (7.1.1)
где t0 – граница интервала времени; τ – случайное время возникновения отказа.
Вероятность возникновения отказа в заданном интервале времени, это вероятность того, что случайный момент отказа привода τ > t0
F (t0) = 1 – P (t0) (7.1.2)
Функция распределения наработки до отказа описывает вероятность того, что случайная величина τ (время возникновения отказа изделия, в нашем случае привода) попадет в интервал (0;t). Вер (τ < t) – эта величина обозначается F(t) и может быть представлена в виде графика, показанного на рис. 7.1.1.
Функция надежности, или кривая убыли, характеризует вероятность того, что случайная величина времени возникновения отказа (τ) будет превышать время t: P {τ > t}. По существу это есть вероятность безотказной работы в интервале времени от (0, t). Оценка вероятности безотказной работы изделия обозначается Р(t):
P( > t) = P(t) = 1 - F(t). (7.1.3)
> t) = P(t) = 1 - F(t). (7.1.3)
Эта функция может быть представлена в виде графика, также показанного на рис.7.1.1. Поток событий (отказов) называется ординарным, если вероятность попадания на произвольный интервал времени (t, t +  t) двух и более событий равна нулю.
t) двух и более событий равна нулю.
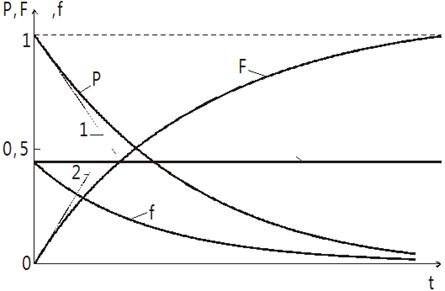
Рис.7.1.1
Зависимость вероятности возникновения отказа (F), вероятности безотказной работы (Р), плотности вероятности возникновения отказов, интенсивности отказов (λ) при экспоненциальном законе распределения от времени (t).
|
|
|
Поток событий (отказов) называется потоком без последствий, если вероятность попадания к событий на интервал времени (t, t+t) не зависит от количества и моментов времени появления событий (отказов) на других интервала времени. Ординарный без последствий поток отказов образует пуассоновский поток. При этом количество событий, происходящих на интервале (t, t+t), распределено по закону редких событий (закон Пуассона), а вероятность того, что случайная величина х (количество событий) в интервале (t, t+t), принимающая значения 0,1,2,3... m, выражается формулой P = Bep(x = m) = 
 . (7.1.4)
. (7.1.4)
Здесь  - математическое ожидание количества событий, называемое параметром закона Пуассона,
- математическое ожидание количества событий, называемое параметром закона Пуассона, 
l(t) - интенсивность отказов, или  - характеристика. Это основной показатель безотказности приводов и их элементов.
- характеристика. Это основной показатель безотказности приводов и их элементов.
Интенсивностью отказов (Failure rate) называется условная плотность возникновения отказа невосстанавливаемого элемента, определяемая до рассматриваемого момента времени при условии, что до этого момента времени отказа не было. На основании статистического анализа отказов приводов в эксплуатации и на испытаниях интенсивность отказов определяется следующим образом:
 , (7.1.5)
, (7.1.5)
где N(t), N(t+ - количество однотипных элементов приводов работоспособных до моментов времени (t, t+t) соответственно;
- количество однотипных элементов приводов работоспособных до моментов времени (t, t+t) соответственно;  - малый промежуток времени.
- малый промежуток времени.
Из определения интенсивности отказов следует вероятностная форма ее выражения:
 , (7.1.6)
, (7.1.6)
где f(t) плотность вероятностей возникновения отказа f(t)=F`(t); F(t) вероятность возникновения отказа за время полёта t.
Средняя наработка за отказ (Mean time between failures).
Пусть за время t в процессе эксплуатации множества однотипных систем приводов на различных самолетах (не обязательно одинаковых) наработка до отказа приводов составила  . Тогда средняя наработка типового привода на отказ
. Тогда средняя наработка типового привода на отказ
 . (7.1.7)
. (7.1.7)
Важным для практики случаем является работа изделия (привода или его составной части) при постоянной интенсивности отказов ( ). Закон распределения отказов при этом - экспоненциальный. При экспоненциальном законе распределения отказов вероятность безотказной работы описывается выражением
). Закон распределения отказов при этом - экспоненциальный. При экспоненциальном законе распределения отказов вероятность безотказной работы описывается выражением
P(t) =  , (7.1.8)
, (7.1.8)
а средняя наработка за отказ Т0 равна:
T =
=  . (7.1.9)
. (7.1.9)
Отсюда следует, что при экспоненциальном законе распределения отказов средняя наработка на отказ равна:
|
|
|
 . (7.1.10)
. (7.1.10)
Зависимость указанных выше показателей надежности от времени, и их взаимосвязь определяется законами распределения наработки до отказа. Эти распределения являются непрерывными.
В теории надежности используются распределения отказов [7.2]: экспоненциальное, нормальное и логарифмически нормальное.
Наиболее широко для оценок надежности систем приводов используется экспоненциальное распределение. Это однопараметрическое распределение, которое характеризуется, как было показано выше, постоянным значением интенсивности отказов ( ). Плотность вероятности для этого закона имеет вид:
). Плотность вероятности для этого закона имеет вид:
 . (7.1.11)
. (7.1.11)
При помощи функции f(t) можно найти вероятность попадания случайной величины P(t) в интервал (a, b):
 (7.1.12)
(7.1.12)
Для систем рулевых приводов самолетов при сравнительно небольшом времени полета и общим высоким уровнем надежности систем авиационной техники можно считать, что 
Тогда для таких приводов функция распределения отказов имеет вид
 (7.1.13)
(7.1.13)
а функция надежности (безопасной работы привода)
 (7.1.14)
(7.1.14)
При малых значениях и t законы распределения F(t) и P(t) графически приближенно представляются линейными функциями, которые показаны пунктирными линиями 1 и 2 на рис.7.1. Эти линии аппроксимируют начальные отрезки соответствующих кривых, (экспонент). Ошибка при использовании этих приближенных формул не превышает величины  [7.2, 7.3].
[7.2, 7.3].
Можно привести три основных характеристики распределения отказов: математическое ожидание  ; среднеквадратическое отклонение
; среднеквадратическое отклонение  , характеризующее рассеяние оценок квадратов относительно М(t), или дисперсия
, характеризующее рассеяние оценок квадратов относительно М(t), или дисперсия  и коэффициент вариации v(t). Для экспоненциального распределения эти оценки имеют вид:
и коэффициент вариации v(t). Для экспоненциального распределения эти оценки имеют вид:
 (7.1.15)
(7.1.15)
Вероятность отказа при экспоненциальном распределении на данном интервале времени (t, t+t) зависит только от длины интервала и не зависит от времени предшествующей работы (t), т.е. будущее поведение изделия не зависит от прошлого, если в данный момент времени изделие исправно (т.е. отсутствует последствие). Для систем рулевых приводов самолетов так же, как и для большинства других технических систем, зависимость интенсивности отказов () от времени имеет «ваннообразный» характер и состоит из трех последовательных участков (рис 7.1.2).
|
|
|
Первый участок изменения этой кривой соответствует этапу приработки приводов, он характеризуется монотонно уменьшающейся интенсивностью отказов, по мере выявления и устранения скрытых дефектов в конструкции привода не выявленных при заводских испытаниях приводов.
Рис.7.1.2.
Зависимость интенсивности отказов (λ) от времени эксплуатации системы приводов (t).
Второй участок соответствует нормальной работе привода на изделии в процессе эксплуатации. На этом участке интенсивность отказов практически не изменяется: l(t)=const.
Третий участок соответствует этапу эксплуатации, на котором начинается износ деталей и узлов, начинает проявляться старение материалов (в первую очередь эластомерных, например, уплотнительных узлов в гидравлических и пневматических приводах). Интенсивность отказов при этом возрастает.
Длительность первого участка можно уменьшить более тщательным конструированием, моделированием привода с учётом коструктивно-технологических факторов и реальных условий эксплуатации, повышением требований к контролю деталей, узлов и ужесточением режимов стендовых испытаний и натурных испытаний. Естественно, что установленная предприятием-изготовителем привода длительность работы привода (его ресурс) не должна выходить за рамки второго участка.
Для оценки надёжности, и в частности безотказности, систем приводов следует использовать второй участок с l(t)=const. На этом участке допустимо и целесообразно применять экспоненциальное распределение отказов для оценки безотказности приводов.
Потеря работоспособности изделия может происходить вследствие следующих событий:
1. Выхода какого-либо параметра привода или его характеристики за допустимые пределы.
2. Нарушения функционирования системы привода или её элементов, например, обрыв электрических цепей, потеря или отключение источников энергии, разрушение конструкции.
Таким образом, все возможные отказы условно можно разделить на параметрические и функциональные отказы.
К параметрическим отказам могут приводить необратимые изменения, связанные с износом, старением и т.п. процессами, например, изменение индуктивности магнитных зазоров в электромеханических узлах, износ гидрораспределителей, засорение фильтров, увеличение вследствие износа механических зазоров. К внезапным параметрическим отказам и функциональным отказам могут приводить накопления повреждений и изменений характеристик элементов привода, например, частичное или полное засорение дросселей в гидроприводах или уже упоминавшееся изменение проводимости магнитного зазора в электромагнитных системах вследствие засорения зазоров металлическими продуктами износа деталей. Вероятность безотказной работы привода P(t) в предположении, что отказы различных видов независимы, определяются выражением
 (7.1.16)
(7.1.16)
где вероятность отсутствия функционального отказа i-го элемента привода;
вероятность отсутствия функционального отказа i-го элемента привода;  вероятность сохранения j-го параметра привода, характеризующего его работоспособность, в допустимых пределах.
вероятность сохранения j-го параметра привода, характеризующего его работоспособность, в допустимых пределах.
Интенсивность отказов каждого из элементов или устройств определяется приближенно как сумма интенсивностей отказов входящих в них элементов:
 (7.1.17)
(7.1.17)
где  интенсивность отказа элемента.
интенсивность отказа элемента.
Суммарная оценка интенсивности отказов привода в целом определяется по выражению
 (7.1.18)
(7.1.18)
В этом выражении слагаемые в квадратных скобках представляют собой оценки интенсивностей отказов соответственно: электромеханических элементов (эм), электрогидравлических элементов (эг), механических элементов (мех), электронных устройств (эл).
Вероятность появления отказа одного привода в целом за время полета  определяется выражением
определяется выражением
 (7.1.19)
(7.1.19)
а вероятность безотказной работы привода в полете продолжительностью
 (7.1.20)
(7.1.20)
Для авиационных приводов гражданских самолетов показатели безотказности регламентируются нормами летной годности. В России это Авиационные правила АП – 25, в США – FAR, в Великобритании – BCAR.
В российских Авиационных правилах даются следующие нормы лётной годности систем [7.4]:
1. Каждое отказное состояние, приводящее к катастрофической ситуации должно оцениваться, как практически невероятное событие. Это событие не должно возникать вследствие единичного отказа одного из элементов системы. (Вероятность появления такого события менее 10-9, 10-10 на один час полета).
2. Суммарная вероятность аварийной ситуации, вызванной функциональными отказами, для самолёта в целом не должна превышать 10-6 на один час полета. При этом рекомендуется, чтобы любой функциональный отказ, приводящий к аварийной ситуации, оценивалось бы, как событие не более частое, чем крайне маловероятное 10-8 на один час полета.
3. Суммарная вероятность возникновения сложной ситуации не должна превышать 10-4 на один час полета. При этом любой функциональный отказ, приводящий к такой ситуации должен оцениваться, как событие не более частое, чем маловероятное 10-6 на один час полета.
Получить экспериментальное подтверждение соответствия приводов столь высоким требованиям к их надёжности практически невозможно. Этот показатель безотказности привода примерно соответствует показателю безотказности механического привода рулевой поверхности сравнительно лёгкого дозвукового самолёта (F(t)оп»10-7) времён второй мировой войны, по которым имеется вполне убедительная статистика отказов приводов десятков тысяч самолётов. (Механический привод рулевой поверхности состоит (смотри рис.7.1.3) из штурвала, системы рычагов и тросов, преобразующих движения штурвала в отклонение рулевой поверхности). Опасным отказом такого привода может быть либо заклинение элементов кинематической передачи, либо её разрушение и разъединение.
Рис.7.1.3
Схема простейшего механического рулевого привода, отклоняющего по сигналу управления (перемещение ручки пилота) рулевую поверхность на угол δ, преодолевая аэродинамический момент Мш.
По надёжности этих приводов имеется очень представительная мировая статистика. Интенсивность отказов таких механических приводов, полученная на основе обобщения десятков тысяч самолётов прошлого века, составляет около λ=10-7 1/ч.
Более «лёгкой» характеристикой безотказности привода, оценки которой могут быть получены в процессе эксплуатации партии самолётов, является время досрочного съёма привода (Тдс) из-за его неисправности. Для современных авиационных приводов подтверждённая оценка Тдс составляет Тдс» (40-70)×103 лётных часов. В то же время в состав современных авиационных приводов входят сложные энергоёмкие электро- и гидромашины, электронные блоки управления, датчики, преобразователи и другие компоненты, показатели надёжности которых гораздо хуже, чем требуемые показатели всего привода. А так как отказ любого из указанных компонентов приводит к отказу всего привода, то общий показатель безотказности привода, состоящего из минимально необходимого для выполнения функций управления набора элементов привода, много хуже требуемого показателя надёжности. В качестве примера можно привести следующие оценки показателей безотказности относительно крупных единиц рулевых авиационных приводов и взаимодействующих с ним устройств [7.5].
Вероятность отказа за один час полёта:
¾ электронные блоки формирования сигналов управления приводом (с вычислителями) l1=(1.5 – 2)×10-4 на один час полета;
¾ электрогидравлический усилитель мощности l2=(0.07 – 2)×10-6 на один час полета;
- гидродвигатель – 0.001 10-6 на один час полета
Некоторые оценки безотказности гидравлических элементов приведены в таблице 7.1.
Таблица 7.1.[7.5]
Показатели безотказности элементов авиационных гидроприводов.
| Элементы. | Интенсивность отказов. |
| Электрогидравлический усилитель мощности типа «сопло-заслонка» | 0.1-2  1/ч 1/ч
|
| Гидравлический силовой цилиндр (заклинивание или разрушение) | 0.003291/ч
|
| Комплект уплотнительных узлов подвижных соединений гидроцилиндра | 30.61351/ч
|
| Датчик обратной связи | 0.046861/ч
|
| Гидравлический источник питания (один канал гидросистемы) | (40-70)1/ч
|
| Электронный блок обработки электрических сигналов | (20-30)1/ч
|
| Система электропитания (один канал) | (10-20)1/ч
|
| Клапан электрогидравлический (заедание или обрыв обмотки) | (0.044-0.086)1/ч
|
| Поршень со штоком рулевой машины (заклинивание) | 0.1521/ч
|
Из приведенных данных следует, что наиболее надежным элементом в системе привода дистанционного управления является исполнительный электрогидравлический механизм. Но и его степень безотказности не соответствует нормам летной годности [7.4]. По действующим нормам летной годности авиационной техники вероятность появления опасного отказа привода, приводящего к возникновению аварийной ситуации, должна быть менее  1/ч. Такую оценку безотказности привода, состоящего из набора элементов, необходимого только для его функционирования, как элемента системы управления, не представляется возможным ни обеспечить, ни доказать.
1/ч. Такую оценку безотказности привода, состоящего из набора элементов, необходимого только для его функционирования, как элемента системы управления, не представляется возможным ни обеспечить, ни доказать.
Следует также учесть, что интенсивность отказов электронных блоков управления исполнительными механизмами приводов существенно увеличивается с повышением температуры окружающей среды.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 405; Нарушение авторских прав?; Мы поможем в написании вашей работы!