КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Управления
|
|
|
|
Система управления представляет собой совокупность объекта управления, регулятора и датчика рассогласования. Типовая автоматическая система может быть представлена в следующем виде (рис.1.6).
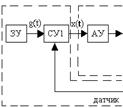
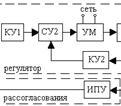
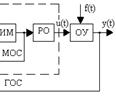
Рис. 1.6. Функциональная схема типовой автоматической системы
Координаты (переменные) системы:
g(t) –задающее воздействие;
y(t) – управляемая величина;
f(t) – возмущающее воздействие;
x(t) = g(t) - y(t) – рассогласование;
u(t) – управляющее воздействие.
Функциональные элементы системы:
ОУ – объект управления;
ЗУ – задающее устройство;
ИПУ – измерительно-преобразовательное устройство;
СУ1, СУ2 – сравнивающие устройства;
РО – регулирующий орган, представляет собой техническое устройство, которое действует на объект управления и непосредственно изменяет управляемую величину y(t);
ИМ – исполнительный механизм, представляет собой техническое устройство, воздействующее на регулирующий орган; в состав исполнительного механизма, как правило, входит какой-либо двигатель;
УМ – усилитель мощности, представляет собой техническое устройство, которое питает энергией исполнительный механизм;
АУ – амплитудный усилитель, устройство, обеспечивающее требуемую чувствительность системы и, в конечном счете, точность ее работы;
КУ1, КУ2 – корректирующие устройства, включаются в систему для того, чтобы сформировать требуемый закон управления для реализации заданного качества управления;
ГОС – главная обратная связь, реализуется измерительно-преобра-зовательным устройством и обеспечивает передачу информации об управляемой величине на вход системы;
МОС – местная или внутренняя обратная связь.
В настоящее время для управления широко используется вычислительная техника, которая позволяет программно реализовать задающее устройство, амплитудный усилитель, сравнивающие и корректирующие устройства. Остальные функциональные элементы реализуются аппаратно.
|
|
|
ЗУ, ИПУ и СУ1 образуют датчик рассогласования ДР. Все остальные функциональные элементы за исключением объекта управления составляют регулятор R. Регулятор, в котором датчик рассогласования может непосредственно (без дополнительного источника энергии) воздействовать на регулирующий орган, называется регулятором прямого действия.
Таким образом, любую систему управления, рассматриваемую как совокупность объекта управления ОУ, датчика рассогласования ДР и регулятора R, можно изобразить в виде упрощенной функциональной схемы (рис. 1.7).
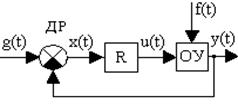
Рис. 1.7. Функциональная схема системы
Элементы системы:
ОУ – объект управления;
ДР - датчик рассогласования;
R – регулятор.
Координаты (переменные) системы:
g(t) – задающее воздействие;
y(t) – управляемая (регулируемая) величина;
f(t) – возмущающее воздействие;
x(t) - рассогласование (ошибка);
u(t) – управляющее воздействие.
Еще в более общем виде систему управления можно рассматривать как ”черный ящик” (рис. 1.8), преобразующий задающее воздействие в управляемую величину.
Рис. 1.8. Кибернетическая модель системы управления
При таком представлении система задается оператором А, устанавливающим связь между входом и выходом:
y(t) = A{g(t)}, (1.7)
где A – оператор системы.
ВОПРОСЫ К РАЗДЕЛУ 1
1. Что изучает теория управления?
2. Определите понятия управление и объект управления.
3. Назовите виды автоматических устройств.
4. Перечислите принципы управления и поясните их.
5. Что представляет собой закон управления?
6. Каково назначение регулятора в системе?
7. По каким признакам классифицируются системы управления?
|
|
|
8. Дайте классификацию систем по виду задающего воздействия.
9. Назовите необходимые и достаточные условия линейности систем.
10. Что представляет собой система управления? Перечислите основные элементы системы автоматического управления.
Содержание Глоссарий
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 224; Нарушение авторских прав?; Мы поможем в написании вашей работы!