КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Понятия о системе резания как о совокупности одновременно совершаемых взаимосвязанных процессов
|
|
|
|
Структурная схема процесса резания. Классификация методов обработки
Способ обработки материалов определяется видом энергии подводимой в зону обработки (механической, электрической и др.). Соответственно различают механическую, электроэрозионную, электрохимическую, лазерную и др. виды обработки.
Механическая обработка представляет собой процесс снятия стружки путем внедрения в поверхностный слой обрабатываемой заготовки режущего клина инструмента, который двигается под действием сил привода станка.
Механическую обработку подразделяют на лезвийную и абразивную.
Лезвийная обработка осуществляется одним или несколькими режущими клиньями имеющими правильную геометрическую форму.
Абразивная обработка осуществляется большим количеством абразивных зерен, имеющих неправильную геометрическую форму.
Для осуществления процесса резания при механической обработке необходимо два движения: главное и вспомогательное.
Главное движение Dr определяет скорость снятия материала с заготовки и имеет наибольшую скорость; вспомогательное движение или движение подачи Ds обеспечивает непрерывность врезания режущего инструмента в срезаемый слой заготовки.
Векторная сумма этих двух движений называется результирующим движением резания Де. Соответственно скорости этих движений будем обозначать как V, Vs, Vе.
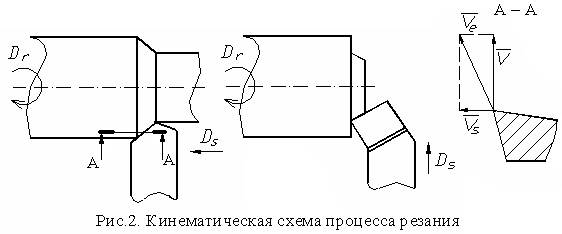
Совокупность относительных движений инструмента и заготовки, необходимая для получения заданных поверхностей называется кинематической схемой процесса резания (рис. 2).
Большое разнообразие возможных комбинаций процесса резания можно классифицировать по следующим признакам:
1) По количеству участвующих в процессе резания режущих кромок:
|
|
|
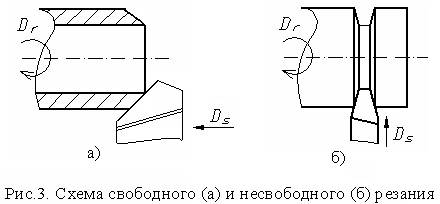
a) свободное резание - в работе принимает участие одна режущая кромка (рис.3, а).
б) несвободное резание – в работе участвуют две и более сопряженных между собой режущих кромок (рис.3, б).
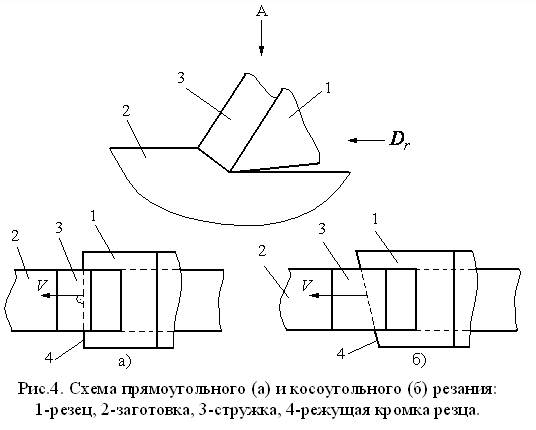
2) По ориентации главной режущей кромки относительно вектора скорости резания (рис. 4):
а) прямоугольное резание, если вектор скорости главного движения перпендикулярен режущей кромке.
б) косоугольное резание, когда вектор скорости главного движения не перпендикулярен режущей кромке.
3) По количеству одновременно участвующих в работе режущих клиньев (лезвий):
a) однолезвийная обработка (точение, строгание);
б) многолезвийная обработка (фрезерование, зенкерование).
4) По форме сечения срезаемого слоя:
a) резание с постоянным сечением срезаемого слоя (точение, сверление);
б) резание с переменным сечением срезаемого слоя (фрезерование).
5) По времени контакта режущего лезвия с обрабатываемой заготовкой:
a) непрерывная обработка (точение);
б) прерывистая обработка (фрезерование).
6) По характеру контактных деформаций стружки:
a) резание без вторичных пластических деформаций;
б) резание со вторичными пластическими деформациями без разрушения контактного слоя стружки;
с) резание со вторичными деформациями контактного слоя стружки и его разрушением (резание с наростом).
7) По непрерывности процесса стружкообразования:
a) резание с образованием сливной стружки;
б) резание с образованием стружки скалывания.
Назначение геометрии режущего инструмента
Геометрия проходного резца
Резец состоит из рабочей части I и тела II, служащего для закрепления его в резцедержателе (рис.5).

Режущая часть образована заточкой следующих поверхностей:
1 – передняя поверхность, поверхность по которой сходит стружка;
2 – главная задняя поверхность;
3 – вспомогательная задняя поверхность;
|
|
|
4 – главная режущая кромка образуется пересечением передней и главной задней поверхностей;
5 – вспомогательная режущая кромка образуется пересечением передней и вспомогательной задней поверхностей;
6 – вершина резца – образуется пересечением главной и вспомогательной режущих кромок.
В процессе обработки на заготовке различают следующие поверхности (рис.6):
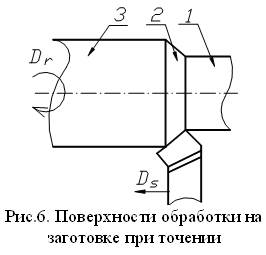
1 – обработанная поверхность, поверхность полученная после снятия стружки;
2 – поверхность резания, которая образуется на заготовке непосредственно режущей кромкой инструмента;
3 - обрабатываемая поверхность – поверхность, с которой снимается стружка.
Углы режущего инструмента.
Углы рассматриваются в трех системах координат:
- инструментальной (ИСК);
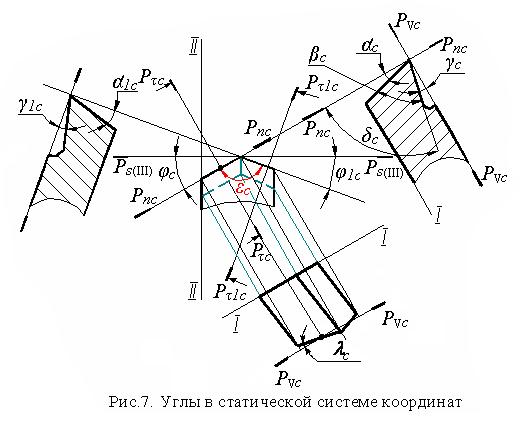
- статической (ССК);
- кинематической (КСК).
Инструментальная система – прямоугольная система координат с началом в вершине режущего инструмента и ориентированная относительно поверхностей инструмента принятых за базу. Применяется для изготовления, заточки и контроля инструмента.
Статическая система – прямоугольная система координат с началом в рассматриваемой точке режущей кромки и ориентированная относительно направления вектора скорости главного движения (V). Применяется для приближенных расчетов углов инструмента и для учета их изменения при установке инструмента на станок.
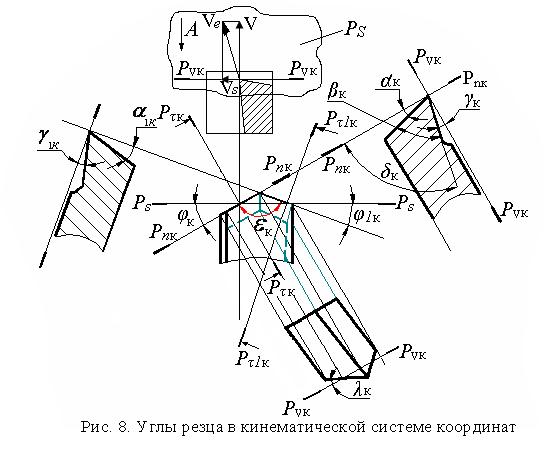
Кинематическая система – прямоугольная система координат с началом в рассматриваемой точке режущей кромки и ориентированная относительно направления вектора скорости результирующего движения (Ve).
Для определения углов рассматривают следующие плоскости:
1. Основная плоскость Pv – плоскость, проведенная через рассматриваемую точку режущей кромки перпендикулярно к направлению вектора скорости главного движения (V) (в ССК) или результирующего движения резания (Ve) (в КСК). В инструментальной системе координат за направление вектора скорости резания принимается перпендикуляр к конструкторской установочной базе резца (прямоугольного сечения). Основную плоскость в инструментальной системе координат будем обозначать Рvи, в статической - PVС, в кинематической - PVК.
2. Плоскость резания Pn – плоскость, касательная к главной режущей кромке в рассматриваемой точке и перпендикулярная основной плоскости (соответственно - Pnи, Pnс, Pnк).
|
|
|
3. Главная секущая плоскость Pt - плоскость, перпендикулярная линии пересечения основной плоскости и плоскости резания (перпендикулярная проекции главной режущей кромки на основную плоскость) (соответственно – Рτи, Рτс, Рτк).
4. Вспомогательная секущая плоскость Pt1 – плоскость, перпендикулярная проекции вспомогательной режущей кромки на основную плоскость (соответственно – Рτ1и, Рτ1с, Рτ1к).
5. Рабочая плоскость Ps – плоскость, в которой расположены векторы скоростей главного движения и движения подачи. В ИСК это плоскость III – III, перпендикулярная плоскостям I – I и II - II.
Углы резца разделяются на главные (измеряются в главной секущей плоскости), вспомогательные углы (измеряются во вспомогательной секущей плоскости) и углы в плане (измеряются в основной плоскости).
К главным углам относятся:
 g - передний угол;
g - передний угол;
a - главный задний угол;
d - угол резания;
b - угол заострения.
К вспомогательным углам относятся:
g1 – вспомогательный передний угол;
a1 – вспомогательный задний угол.
К углам в плане относятся:
j - главный угол в плане;
j1 – вспомогательный угол в плане;
e - угол при вершине.
Кроме того, рассматривают угол наклона главной режущей кромки l, который измеряется в плоскости резания.
В различных системах координат определение углов аналогичны – углам и плоскостям, которые их образуют и в которых они рассматриваются, присваивается обозначение системы координат, например gи, gс, gк и т.п.
Передний угол g - угол между основной плоскостью и передней поверхностью инструмента (может быть положительным, отрицательным или равным нулю);
главный задний угол a - угол между плоскостью резания и главной задней поверхностью;
угол резания d - угол между передней поверхностью и плоскостью резания;
угол заострения b - угол между передней и главной задней поверхностями;
главный угол в плане j - угол между плоскостью резания и рабочей плоскостью;
|
|
|
вспомогательный угол в плане j1 – угол между проекцией вспомогательной режущей кромки на основную плоскость и рабочей плоскостью;
угол при вершине e - угол между проекциями главной и вспомогательной режущих кромок на основную плоскость.
угол наклона главной режущей кромки l - угол между главной режущей кромкой и основной плоскостью;
вспомогательный задний угол a1 - угол между вспомогательной задней поверхностью и перпендикуляром к основной плоскости.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 577; Нарушение авторских прав?; Мы поможем в написании вашей работы!