КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция №1 Основные понятия и определения
|
|
|
|
ВВЕДЕНИЕ
Лекция №6 Взаимосвязанные системы регулирования. Системы
Лекция №5 Системы каскадного регулирования. АСР с дополнительным
импульсом по производной из промежуточной точки……………….22
несвязанного и связанного (автономного) регулирования. ………… 27
Под управлением понимается совокупность действий, выбранных на основании определенной информации и направленных на поддержание или улучшение функционирования объекта в соответствии с имеющейся программой, алгоритмом или целью его работы(объектом может быть изделие, процесс и т.д.)
Очевидно, что процесс управления, как выработка и осуществление целенаправленных управленческих воздействий на объект включает в себя:
· Сбор
· Хранение
· Передачу
· Обработку необходимой информации;
· Принятие и реализацию соответствующих решений.
Методы управления объектом различны в зависимости от задач и отличаются от технологических операций и процессов объекта управления.
Основные функции управления объектом реализуются ручными, механизированными, автоматизированными и автоматическими методами.
Примечания:
При ручных методах управляющий объектом человек затрачивает физические и умственные силы.
Использование механизированных методов предполагает использование человеком «оборудования», которое полностью или частично заменяет его физический труд, необходимый для управления.
При автоматизированном методе управления объектом применяются оборудования, обеспечивающие полную замену физического труда и частичную замену умственного труда.
Автоматическое управление позволяет полностью заменить физический и умственный труд.
Говорят, что совокупность средств управления и объекта управления образует систему управления (СУ).
|
|
|
Вопросы, рассматриваемые в лекции:
1. Определение автоматизации.
2. Предназначение системы управления.
3. Этапы развития АСУТП.
4. Основные технические средства автоматики.
5. Критерии управления.
Автоматизация - применение машин, машинной техники и технологии с целью облегчения человеческого труда, вытеснения его ручных форм, повышения его производительности. Автоматизация производства призвана устранить физически тяжелый, монотонный труд, переложив его на плечи машин. Автоматизация управления направлена на использование компьютеров и других технических средств обработки и передачи информации в управлении производством, экономикой.
Задача – осуществление управления технологическим процессом, т.е. осуществлять определенные воздействия, соответствующие алгоритму управления системой.
Технологический объект управления – совокупность технологического оборудования и реализованного на нем в соответствии с инструкциями и регламентом технологического процесса производства.
Автоматизированная система управления – предназначена для выработки и реализации управляющих воздействий на технологический объект управления в соответствии с принятым критерием управления.
Критерий управления – соотношение, характеризующее качество работы технологического объекта управления в целом и принимающее числовые значения в зависимости от управляющих воздействий. Критерий может быть технико-экономическим или техническим (параметры процесса, показатели продукта и т.п.) показателем. Необходимы ограничения при выборе управляющих воздействий.
Современная АСУТП (автоматизированная система управления технологическим процессом) представляет собой многоуровневую человеко-машинную систему управления. Создание АСУ сложными технологическими процессами осуществляется с использованием автоматических информационных систем сбора данных и вычислительных комплексов, которые постоянно совершенствуются по мере эволюции технических средств и программного обеспечения.
|
|
|
Непрерывную во времени картину развития АСУТП можно разделить на три этапа.
Первый этап отражает внедрение систем автоматического регулирования (САР).
Второй этап – автоматизация технологических процессов. Объектом управления становится рассредоточенная в пространстве система; с помощью систем автоматического управления (САУ) реализуются все более сложные законы управления, решаются задачи оптимального и адаптивного управления, проводится идентификация объекта и состояний системы. Характерной особенностью этого этапа является внедрение систем телемеханики в управление технологическими процессами.
Третий этап – автоматизированные системы управления технологическими процессами - характеризуется внедрением в управление технологическими процессами вычислительной техники.
Основой, необходимым условием эффективной реализации диспетчерского управления, имеющего ярко выраженный динамический характер, становится работа с информацией, т. е. процессы сбора, передачи, обработки, отображения, представления информации.
Любую фабрику, завод, предприятие в целом можно рассматривать как подсистему в общей системе промышленности. Управление простейшей подсистемой заключается в выполнении отдельных более простых операций – операций регулирования.
Воздействие на технологический процесс, аппарат или машину в целях поддержания или определенного изменения какой-либо выбранной величины называется регулированием. Например, воздействие на насосную установку, чтобы поддержать заданную производительность, изменение частоты вращения разгрузочного устройства в отсадочной машине для стабилизации высоты постели на отсадочном решете, изменение количества реагентов, подаваемых в процесс флотации, при изменении количества твердого во флотационной пульпе. Регулирование – часть управления.
Для осуществления операций управления и регулирования какой-либо системой (объектом) необходимо иметь данные о том, как эта система должна работать, в каком она состоянии и какие результаты ее работы уже имеются. Все эти данные, необходимые для управления и регулирования, составляют информацию.
|
|
|
Процессы управления и регулирования заключаются в сборе необходимой информации, ее оценке и переработке в целях получения оперативного решения и выработки управляющего (регулирующего) воздействия на систему.
Качественное различие между управлением и регулированием состоит в том, что для управления системой используется и перерабатывается разнородная информация, а для регулирования – информация одного вида.
Технологические процессы и машины, в которых поддержание заданных технологических режимов при изменяющихся условиях работы (в допустимых пределах) обеспечивается без управляющего участия человека, называются автоматическими.
Современная кибернетика сформулировала единый подход к анализу и описанию (алгоритмизации) различных процессов управления и переработки информации, позволивший использовать электронные вычислительные машины для управления технологическими процессами, применяемыми, в частности, на углеобогатительных и брикетных фабриках.
Автоматизация позволяет успешно решать задачи повышения производительности, стабильности и качественных результатов технологических процессов, предупреждения аварийных ситуаций, повышения выхода готового товарного продукта, снижения потерь угля с отходами, улучшения условий и повышения долговечности работы оборудования.
В настоящее время все достаточно крупные промышленные предприятия автоматизированы. Однако степень автоматизации различна и зависит от общего технического уровня производства.
В тех случаях, когда ставят цель автоматически получить только информацию о технологических параметрах, применяют системы и средства автоматического контроля.
Более высокий уровень автоматизации – централизованный контроль, при котором вся информация поступает на пульт оператора или диспетчера. В этом случае используется дистанционное управление, позволяющее посредством установленных в технологической цепи фабрики исполнительных механизмов управлять процессом с центрального пульта.
|
|
|
Следующая ступень автоматизации – автоматическое регулирование технологических параметров или работы машин с помощью локальных систем автоматики.
Для предупреждения аварийных ситуаций нарушения технологического режима применяют автоматическую защиту и блокировку.
Наиболее высокий уровень автоматизации технологии, производства достигается использовании автоматизированных систем управления (АСУ), обеспечивающих оптимизацию качественно – количественных и экономических показателей производства. Применение АСУ на производстве предусматривает сочетание всех перечисленных выше видов автоматизации.
Технологический процесс, агрегат или машина, один или несколько параметров которого регулируются автоматически называется объектом регулирования, а эти параметры параметрами регулирования.
Объект регулирования и автоматические устройства обеспечивающие регулирование, составляют систему автоматического регулирования (CAP).
Активное воздействие, которое оказывает система автоматического регулирования на технологический процесс или аппарат в процессе регулирования, называется регулирующим воздействием.
Различные приборы и устройства, входящие в систему и обеспечивающие автоматизацию процесса, называются техническими средствами автоматики.
Основными техническими средствами автоматики являются следующие.
Датчик – устройство, преобразующее контролируемую величину в информационный сигнал, удобный для использования в системах автоматизации. Датчик обычно состоит из измерительного и первичного преобразователей.
Вторичные показывающие или регистрирующие приборы – устройства, которые получают сигналы от датчиков и выдают наглядную информацию о значении контролируемого параметра оператору, следящему за технологическим процессом.
Измерительный преобразователь, первичный и вторичный приборы образуют систему автоматического контроля и осуществляют измерения контролируемой величины или параметра.
Регулирующие приборы (или регуляторы) получают информацию непосредственно от датчиков или через вторичные приборы и вырабатывают регулирующие воздействия.
Исполнительные механизмы – устройства, которые реализуют регулирующее воздействие, выработанное регулятором. Регулятор включает, выключает или реверсирует исполнительный механизм либо изменяет скорость его действия. Исполнительный механизм получает энергию от внешнего источника и превращает ее в механическое действие регулирующего органа.
Регулирующий орган – часть объекта регулирования, предназначенная для изменения технологического режима.
Все средства автоматизации объединяются в системы с помощью информационных каналов, по которым передается информация в виде периодических или изменяющихся по величине непрерывных сигналов. От датчика сигналы поступают к вторичному прибору или регулятору. В регуляторе информация от датчика перерабатывается и в виде управляющих сигналов поступает в исполнительный механизм.
В автоматизированных системах управления, большая часть информации от датчиков поступает в управляющие вычислительные машины (контроллеры), которые также перерабатывают поступившую информацию в управляющие воздействия. Вычислительные машины учитывают значительно большее количество параметров и их взаимосвязей, благодаря чему значительно повышается эффективность управления технологическими процессами;
Технические средства автоматизации состоят из отдельных элементов, каждый из которых выполняет строго определенную функцию: усиление, суммирование, регистрацию и т. д. Сочетание элементов определяет структуру и функции средств автоматизации.
Лекция №2 Понятие технологического процесса как объекта управления. Классификация систем управления
Вопросы, рассматриваемые в лекции:
1.Основные группы переменных технологического процесса.
2.Понятие математической модели технологического процесса.
3.Понятие и классификация технологических систем автоматического регулирования.
4.Разомкнутые системы регулирования.
5.Замкнутые системы регулирования.
6.Комбинированные системы регулирования.
7.Локальные системы регулирования. Автоматизированные системы управления производств.
Один из этапов проектирования систем регулирования технологических процессов – выбор структуры системы и расчет оптимальных параметров регуляторов. И структура системы, и параметры регуляторов определяются свойствами технологического процесса как объекта регулирования.
Любой технологический процесс как объект регулирования характеризуется следующими основными группами переменных.
1. Переменные, характеризующие состояние процесса (совокупность их будем обозначать вектором y). Эти переменные в процессе регулирования необходимо поддерживать на заданном уровне или изменять по заданному закону. Точность стабилизации переменных состояния может быть различной, в зависимости от требований, диктуемых технологией, и возможностей системы регулирования. Как правило, переменные, входящие в вектор у, измеряют непосредственно, но иногда их можно вычислить, используя модель объекта по другим непосредственно измеряемым переменным. Вектор у часто называют вектором регулируемых величин.
2. Переменные, изменением которых система регулирования может воздействовать на объект с целью управления. Совокупность этих переменных обозначают вектором хр (или u) регулирующих воздействий. Обычно регулирующими воздействиями служат изменения расходов материальных потоков или потоков энергии.
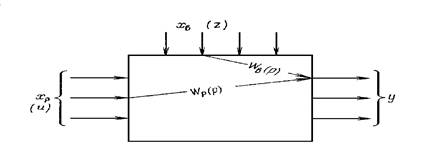
Рисунок 1 - Структурная схема объекта регулирования
3. Переменные, изменения которых не связаны с воздействием системы регулирования. Эти изменения отражают влияние на регулируемый объект внешних условий, изменения характеристик самого объекта и т. п. Их называют возмущающими воздействиями и обозначают вектором хв или z. Вектор возмущающих воздействий, в свою очередь, можно разбить на две составляющие – первую можно измерить, а вторую – нельзя. Возможность измерения возмущающего воздействия позволяет ввести в систему регулирования дополнительный сигнал, что улучшает возможности системы регулирования.
Например, для изотермического химического реактора непрерывного действия, регулируемыми переменными являются; температура реакционной смеси, состав потока на выходе из аппарата; регулирующими воздействиями могут быть изменение расхода пара в рубашку реактора, изменение расхода катализатора и расхода реакционной смеси возмущающими воздействиями являются изменения состава сырья, давления греющего пара, причем если давление греющего пара нетрудно измерить, то состав сырья во многих случаях может быть измерен с низкой точностью или недостаточно оперативно.
Анализ технологического процесса как объекта автоматического регулирования предполагает оценку его статических и динамических свойств по каждому из каналов от любого возможного управляющего воздействия к любому возможному регулируемому параметру, а также оценку аналогичных характеристик по каналам связи регулируемых переменных с составляющими вектора возмущений. В ходе такого анализа необходимо выбрать структуру системы регулирования, т. е. решить, с использованием какого регулирующего воздействия следует управлять тем или иным параметром состояния. В результате во многих случаях (отнюдь не всегда) удается выделить контуры регулирования для каждой из регулируемых величин, т. е. получить совокупность одноконтурных систем регулирования.
Цель анализа объекта управления (технологического процесса) – математически связать характеристики состояния производственного процесса в виде модели.
Технологические процессы классифицируются на:
дискретные - (штучные, периодически повторяемые процессы),
непрерывные - (в которых конечный продукт непрерывно вырабатывается при непрерывном входе сырья, энергии, компонентов, управляющих воздействий и др.),
непрерывно-дискретные - (где в относительно длительном промежутке времени вырабатывается определенное ограниченное количество конечного продукта, периодически выдаваемого), поэтому для них характерно наличие циклов и сочетание особенностей непрерывного и дискретного процессов.
Классификация систем автоматического регулирования.
Системы автоматического регулирования можно классифицировать по различным признакам: принципу действия, характеру сигналов, математическому описанию, виду используемой энергии и т. д. Рассмотрим сначала классификацию систем по принципу их действия. При этом все многообразие систем автоматического регулирования можно подразделить на четыре класса: системы, работающие по разомкнутому, замкнутому, комбинированному циклам, и самонастраивающиеся системы. Самонастраивающиеся системы для нормального функционирования не требуют полных знаний о характере процесса регулирования и в процессе работы приспосабливаются к изменяющимся внешним условиям.
Каждый класс систем регулирования разделяется на группы (рис. 2). Системы автоматического регулирования, работающие по замкнутому циклу, делятся на системы автоматической стабилизации, системы программного регулирования и следящие системы.

Рисунок 2 - Классификация систем автоматического регулирования
В системах автоматической стабилизации управляющие воздействия являются постоянными заранее заданными величинами. Системы программного регулирования отличаются от систем стабилизации тем, что в них управляющие воздействия являются известными функциями времени. В следящих системах управляющие воздействия представляют собой заранее неизвестные функции времени.
Системы автоматического регулирования, работающие по разомкнутому циклу, делят на системы компенсации и разомкнутые системы программного регулирования. Системы компенсации уменьшают влияние возмущающих воздействий на регулируемые переменные путем изменения самих воздействий или компенсации их действия на системы.
В последнее время весьма широкое применение получили разомкнутые системы программного регулирования. К ним прежде всего относятся металлорежущие станки с программным управлением. Программа управления, записанная на магнитных запоминающих устройствах в цифровом коде, поступает на исполнительные устройства станков, обеспечивая заданную последовательность выполнения операций обработки.
Системы автоматического регулирования, работающие по комбинированному циклу, делятся на две группы: системы автоматической стабилизации и следящие системы. Эти системы могут иметь один или два разомкнутых цикла, компенсирующих влияние сигналов управления и возмущения.
Наконец, к последнему классу систем относятся три группы: самонастраивающиеся системы, экстремального регулирования, системы с перестраивающимися устройствами и аналитические самонастраивающиеся системы.
В экстремальных системах автоматический регулятор поддерживает экстремальное значение регулируемой величины путем подачи поискового сигнала.
В системах с перестраивающимися устройствами параметры или структура автоматически изменяются в зависимости от управляющих и возмущающих воздействий или переменности параметров объекта. Перестройка свойств аналитических самонастраивающихся систем осуществляется на основе аналитического определения их динамических характеристик. Из этого определения следует, что в состав аналитических самонастраивающихся систем должны входить вычислительные машины. Следует отметить, что в самонастраивающихся системах регулирования с игровыми вычислительными машинами последовательность действий, заданная программой, называется алгоритмом.
В ряде случаев в самонастраивающиеся системы, кроме обычных устройств систем регулирования, входят элементы, выполняющие логические операции, блоки памяти и устройства формирования поискового сигнала. Помимо основных логических элементов, осуществляющих операции ДА, НЕТ, И, ИЛИ, здесь применяются более сложные элементы, выполняющие операции совпадения, равнозначности, нахождения экстремума, выбора из нескольких однородных величин наибольшей или наименьшей.
При классификации систем регулирования по виду сигналов все системы можно разделить на: непрерывные, дискретные, дискретно-непрерывные (цифровые) и релейные. В непрерывных системах все сигналы в устройствах и объектах регулирования представляют собой непрерывные функции времени. В дискретных системах все сигналы квантуются по времени и амплитуде, а в дискретно-непрерывных – только по времени. В последнем классе систем имеются две группы устройств регулирования: непрерывных и дискретных. При квантовании непрерывного сигнала по уровню образуется ступенчатый сигнал. Элементы, осуществляющие квантование сигнала по уровню, называются релейными, а системы с подобного рода элементами – релейными системами автоматического регулирования.
Классификация по математическому описанию разделяет все системы на два класса: линейные и нелинейные (т. е. по виду дифференциальных уравнений, описывающих поведение системы в динамике). При такой классификации каждый класс систем можно разбить на четыре группы: 1) стационарные с сосредоточенными параметрами; 2) стационарные с сосредоточенными и распределенными параметрами; 3) нестационарные системы с сосредоточенными параметрами; 4) нестационарные системы с сосредоточенными и распределенными параметрами.
Первая группа систем описывается обыкновенными дифференциальными уравнениями с постоянными параметрами. В системах с распределенными параметрами (вторая группа) отдельные устройства системы или ее объекты описываются дифференциальными уравнениями в частных производных. В системах третьей и четвертой групп параметры дифференциальных уравнений изменяются в зависимости от времени. Каждая группа систем может быть разделена на две подгруппы на детерминированные и стохастические.
При классификации по виду используемой энергии все системы можно подразделить на электрические, гидравлические, пневматические, электрогидравлические, электропневматические и т. п. Однако этой классификацией в настоящее время пользуются крайне редко.
Как известно, всякая система автоматического регулирования состоит из объекта регулирования и регулятора, в который входит чувствительный элемент. Системы регулирования, где чувствительный элемент воздействует непосредственно на регулирующий орган, называются системами прямого регулирования, а регуляторы – регуляторами прямого действия.
В регуляторах прямого действия энергия, необходимая для изменения положения регулирующего органа, поступает от чувствительного элемента. Если последний не в состоянии развить требуемую мощность для нормальной работы регулирующего органа, то система регулирования не может функционировать. Кроме того, системы прямого регулирования имеют низкую точность и поэтому применяются редко.
В системах непрямого регулирования после чувствительного элемента устанавливаются усилители мощности и серводвигатели, воздействующие на регулируемые органы. В этом случае повышается точность и качество процессов регулирования.
В заключение отметим, что в зависимости от числа регулируемых величин системы автоматического регулирования подразделяют на одномерные (одна регулируемая величина), двухмерные (две регулируемые величины) и многомерные (при n регулируемых величинах). Многомерные системы регулирования могут быть системами несвязанного и связанного регулирования. В системе несвязанного регулирования регуляторы, управляющие различными переменными, не связаны друг с другом и работают независимо. В системе связанного регулирования регуляторы связаны между собой и для нормальной работы требуется их вполне определенное взаимодействие. Систему связанного регулирования называют автономной, если существуют такие связи между регуляторами, когда изменение одной из регулируемых величин не вызывает изменения остальных.
По принципу действия – разомкнутые, замкнутые, комбинированные, самонастраивающие.
Замкнутые – стабилизации, программные, следящие.
Разомкнутые – системы компенсации, программные.
Комбинированные – стабилизации, следящие.
Самонастраивающие – экстремальные, с перестраивающими устройствами, аналитически самонастраивающие. (в перенастраиваемых - параметры или структура автоматически изменяется в зависимости от управляющих и возмущающих воздействий или переменности параметров объекта), (в аналитических - перестройка свойств систем осуществляется на основе аналитического определения их динамических характеристик).
По виду сигналов – непрерывные, дискретные, дискретно-непрерывные (цифровые), релейные.
По математическому описанию – линейные и нелинейные.
При этом каждый класс можно разбить на четыре группы по виду дифференциальных уравнений
1 - стационарные с сосредоточенными параметрами
2 -стационарные с сосредоточенными и распределенными параметрами
3 - нестационарные системы с сосредоточенными параметрами
4 - нестационарные системы с сосредоточенными и распределенными параметрами
В зависимости от числа регулируемых величин – одномерные и многомерные (несвязанные и связанные - автономные).
Прямого действия и не прямого. (где чувствительный элемент воздействует непосредственно на регулирующий орган или сигнал чувствительного элемента преобразуется и усиливается)
Автоматизация производств строится двух видов – автоматизация участков, агрегатов и т.п. и автоматизация на уровне предприятий и производств, отраслей.
Локальные системы автоматизации их состав – автоматический контроль, регулирование, стабилизации и программного управления, сигнализации, блокировки, защиты от аварий. Дальнейшее совершенствование систем управления связано с использованием многоконтурных систем и систем оптимального управления.
Автоматические системы выполняют следующие функции управления –
одноконтурное автоматическое регулирование
каскадное и программное регулирование
многосвязанное автоматическое регулирование
логическое управление (блокировка)
согласование (координация) работы агрегатов, участков
оптимальное управление установившимся режимом (в статике)
оптимальное управление переходными режимами (в динамике)
автоматическое программно – логическое управление
оптимальное управление с адаптацией и изменением алгоритмов и параметров системы.
Автоматизированная система управления АСУ ТП – это АСУ для выработки и реализации управляющих воздействий на ТОУ в соответствии с принятым критерием управления.
Критерий управления АСУ ТП – соотношение, характеризующее качество работы технологического объекта управления в целом и принимающее числовые значения в зависимости от управляющих воздействий.
АСУ ТП отличается от локальной автоматизации более совершенной организацией потоков информации, более полным ее представлением, более высокой степенью автоматизации функций управления, включая пуск и останов Т.П.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 3217; Нарушение авторских прав?; Мы поможем в написании вашей работы!