КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция № 3 Выбор параметров управления
|
|
|
|
Вопросы, рассматриваемые в лекции:
1. Выбор параметров управления.
2. Определения уровня автоматизации ТОУ.
3. Объекты управления и их основные свойства
Выбор регулируемых величин и каналов внесения регулирующего воздействия.
Из многих параметров, характеризующих процесс необходимо выбрать те, которые подлежат регулированию и изменением которых целесообразно вносить регулирующие воздействия. Обычно их число не превышает 1/4 части всех параметров, участвующих в управлении.
Выполнить эту задачу можно лишь по результатам анализа целевого назначения процесса и его взаимосвязи с другими процессами производства, используя информационную модель процесса. Исходя из результатов анализа, выбирают критерий управления, его заданное значение и параметры, изменением которых наиболее целесообразно на него воздействовать. Последнее достигается на основе статических и динамических характеристик процесса, дающих представление о взаимозависимости параметров.
При этом необходимо помнить, что «наилучшее» состояние объекта управления это нахождение его в равновесии, т.е. когда он сбалансирован. И и в ТОУ имеется баланс масс, сил, тепла, энергии. Отсюда следует, что ряд технологических параметров, как температура, уровень, давление, являются регулируемыми (выходными) величинами, отвечающими за сбалансированность ТОУ и одновременно быть управляющими воздействиями для общего критерия управления, данного ТОУ – например качество или себестоимость продукта.
Анализируя статику и динамику каналов, выбирают наиболее эффективные управляющие воздействия с обеспечивающие наибольшую точность и максимальное качество управления. Стоит заметить, что необходимо также учитывать возможность компенсации управляющим воздействием максимального возмущения или суммы возмущений, т.е. учитывать коэффициент усиления по данному каналу.
Другими словами канал регулирования выбирают так, чтобы регулирующее воздействие сопровождалось максимальным и быстрым изменением регулируемой величины, т.е. чтобы коэффициент усиления объекта по каналу регулирования был максимален.
После выбора критерия управления и каналов воздействия на него приступают к анализу ТОУ с точки зрения возможных возмущений и путей их ликвидации до поступления в объект. При этом особое внимание обращают на стабилизацию входных параметров, т.к. с их изменением в объект поступают наиболее сильные возмущения.
Как правило, все возмущения не удается ликвидировать до поступления в объект. Особо трудно предусмотреть и устранить внутренние возмущения. Поскольку все возмущения не могут быть ликвидированы, они приводят к изменению режимных параметров, а затем и критерия управления. Появляется необходимость регулирования режимных параметров.
В конечном итоге приходят к созданию комбинированной системыуправления, осуществляющей регулирование критерия управления, режимных и входных параметров.
Выбор контролируемых величин.
Контролю подлежат параметры, по значениям которых осуществляется оперативное управление технологическим процессом. К таким параметрам относятся все режимные и выходные параметры, а также входные параметры, при изменении которых в объект будут поступать возмущения. Должен осуществляться принцип – «хочу все знать», что влияет на критерий управления данного ТОУ.
Выбор сигнализируемых величин.
К выбору приступают после анализа ТОУ в отношении его взрыво- и пожароопасности, токсичности и агрессивности перерабатываемых веществ, возможных аварий и несчастных случаев. В современных системах управления, когда используются вычислительные средства, сигнализацией могут быть охвачены все контролируемые величины, которые влияют на целевой продукт и отклонение которых за допустимые приделы приводит к возникновению аварийной ситуации. Это обеспечивает полный мониторинг состояния процесса и оборудования.
Предаварийной (а при необходимости предупредительной) сигнализации подлежат параметры, предельные значения которых могут привести к: взрыву и пожару, несчастным случаям, аварии, выходу из строя оборудования, существенному нарушению технологического режима, выпуску некондиционной продукции и браку.
Сигнализации подлежит факт изменения количественных и качественных характеристик целевых продуктов, не предусмотренная технологическим регламентом остановка отдельных агрегатов.
Выбор параметров и способов защиты.
Оперативный персонал при его оповещении устройствами сигнализации о нежелательных событиях должен принять соответствующие меры по их ликвидации. Если эти меры окажутся неэффективными и параметр достигнет аварийного значения, должны сработать системы противоаварийной защиты (ПАЗ), которые автоматически по заданной программе перераспределяют материальные или энергетические потоки, включают и отключают аппараты объекта с целью предотвращения взрыва, аварии, несчастного случая и т.д.
Комплекс реализуемых способов защиты разрабатывают, исходя из особенностей ТОУ, анализа аварийных ситуаций и категории взрывоопасности ТОУ.
Определение уровня автоматизации ТОУ
Уровень автоматизации характеризует долю труда по управлению ТО, производимую автоматически, без участия человека, Количественная оценка его осуществляется с помощью показателя К
где кi -частные показатели уровня автоматизации отдельных функций управления.
ai - коэффициент «важности» функций, определяющий относительную значимость данной функции в общем процессе управления.
Максимальное значение показателя к равно единице(кмакс=1), а нормативное его значение принимают в диапазоне 0.75-0.9
| i | функции управления | a |
| контроль технологических параметров | 0.9 | |
| контроль параметров качества сырья, полуфабрикатов | 0.9 | |
| регистрация технологических параметров | 0.7 | |
| контроль состояния основного оборудования | 1.0 | |
| контроль работоспособности комплекса ТСА | 1.0 | |
| расчет технико-экономических показателей | 0.8 | |
| анализ технологических ситуаций | 0.7 | |
| пуск и останов | 0.8 | |
| управление технологическим процессом | 0.9 | |
| оптимизация технологического процесса | 0.9 | |
| оценка качества ведения технологического процесса | 0.7 | |
| обмен информацией со смежными уровнями управления | 0.7 |
Если СУ не выполняет, какую либо функцию, то частный показатель принимается равным нулю.
Объекты управления и их основные свойства
Объект управления является основной составной частью автоматической системы, определяющий ее характер. При всем разнообразии объектов управления они могут быть распределены на небольшое число типов, обладающих аналогичными динамическими характеристиками и характеризующихся следующими свойствами:нагрузкой, емкостью, способностью к самовыравниванию, запаздыванием процесса.
Емкость
Способность объектов аккумулировать рабочую среду, запасать ее внутри объекта называется аккумулирующей способностью или емкостью объекта. Накопление вещества или энергии возможно благодаря тому, что в каждом объекте имеется сопротивление выходу.
Объекты управления подразделяются на одноемкостные и многоемкостные. Объект называется одноемкостным если он состоит из одного сопротивления и емкости (аппарат в котором регулируется уровень, теплообменник смещения).
Многоемкостным объектом называется такой, который имеет две или более емкости, участвующие в процессе управления и разделенные переходными сопротивлениями (трубчатый теплообменник). В многоемкостных объектах различают емкости на входе и выходе.
Мерой емкости служит коэффициент емкости- количество вещества или энергии, которое нужно подвести к объекту, чтобы изменить управляемую величину на единицу:
 , где
, где
DQ- разность между притоком и расходом вещества или энергии, Y- управляемый параметр, t- время.
Чем больше коэффициент емкости объекта, тем меньше скорость изменения управляемого параметра при одном и том же изменении количества подаваемого продукта. А это значит, что легче поддаются управлению те объекты, коэффициент емкости которых больше.
Нагрузка
Нагрузка -количество вещества или энергии, отбираемых из объекта для производственных нужд. Изменение нагрузки является сильным возмущающим воздействием. Чем чаще и в больших масштабах изменяется нагрузка тем сложнее управлять объектом.
Самовыравнивание.
Способность объекта приходить после возмущения в новое установившееся состояние без вмешательства управляющего устройства называется самовыравниванием объекта.
Объекты обладающие самовыравниванием называются статическими объектами. Чем больше величина самовыравнивания, тем меньше отклоняется управляемый параметр от состояния равновесия, существовавшего до возмущения. Самовыравнивание облегчает работу управляющего устройства.
Объекты, не обладающие самовыравниванием, называются нейтральными или астатическими. Отсутствие самовыравнивания ухудшает возможности управления объектом.
Объект с самовыравниванием:
Qп и Qр -величины расходов жидкости на притоке и расходе. Н- уровень в емкости.
Объект без самовыравнивания :
Некоторые объекты обладают идеальным самовыравниванием, например, резервуар с переливной трубой, обеспечивающий постоянный уровень при любых изменениях притока жидкости.
Самовыравнивание характеризуется коэффициентом (степенью) самовыравнивания: r = l / y, где l =DQ п/Qмакс, у =DН /Но.
Коэффициент самовыравнивания не является постоянной величиной, а зависит от нагрузки объекта, Максимальной нагрузке соответствует максимальное значение r.
Запаздывание
В реальных объектах часто между моментом нарушения равновесия и началом изменения управляемой величины проходит некоторое время-запаздывание. Запаздывание объясняется наличием сопротивлений и инерционностью системы.
Различают два вида запаздывания: чистое (или транспортное) и переходное (емкостное).
Чистым запаздыванием называется время t от момента внесения возмущающего воздействия до начала изменения управляемой величины. Это время необходимо для того, чтобы поток вещества или энергии, обладающий скоростью v, прошел расстояние L от места внесения возмущающего воздействия до места, в котором измеряется значение управляемой величины. Например, контроль толщины насыпного слоя на ленте транспортера:
Чистое запаздывание смещает во времени реакцию на выходе в объекте по сравнению с моментом нанесения входного воздействия на величину запаздывания, не изменяя величину и форму воздействия.
Обычно в управляемых объектах имеется не только чистое, но и переходное запаздывание, которое характерно для многоемкостных объектов. Запаздывание возникает при преодолении потоком вещества или энергии сопротивлений, разделяющих гидравлические, тепловые и другие емкости объекта.
Например:
Время переходного запаздывания определяется отрезком tп. Переходное запаздывание определяется числом емкостей и величиной переходных сопротивлений. Поскольку величины переходных сопротивлений в процессе эксплуатации объекта могут изменяться, величины запаздываний могут возрастать.
Общее запаздывание tобщ в объекте управления равно сумме чистого и переходного запаздываний:
tобщ = t +tп.
Как чистое так и переходное запаздывания всегда неблагоприятно сказываются на качестве управления.
Лекция №4 Теория инвариантности автоматических систем управления и комбинированные АСР
Вопросы, рассматриваемые в лекции:
1. Типовые компенсаторы.
2. Расчет компенсатора.
3. Условие приближенной инвариантности, принцип инвариантности.
4. Условие физической реализуемости инвариантных САР.
Абсолютной инвариантностью называют независимость координат объекта от возмущающих воздействий при любом значении времени течения процесса. Инвариантностью до e называется приближенное выполнение условий независимости координат объекта от возмущений (мера близости может быть различной).
Одним из основных в теории инвариантности является вопрос о физической реализуемости условий инвариантности, который рассматривается в трех аспектах:
принципиальной возможности достижения независимости регулируемой координаты от возмущения в системе с конкретной структурной схемой;
отсутствия противоречий между условиями инвариантности и устойчивости;
возможности аппаратурной реализации условий инвариантности (физически не реализуемы звенья с порядком полинома в числителе передаточной функции более высоким, чем порядок полинома в знаменателе)
Необходимый признак осуществимости условий абсолютной инвариантности сформулирован в форме принципа двухканальности, в соответствии с которым для реализуемости абсолютно инвариантной системы в ней необходимо наличие по меньшей мере двух каналов передачи возмущающего воздействия f(t) между точкой его приложения и точкой измерения координаты, для которой достигается инвариантность. Принцип двухканальности является идейной основой при конструировании и практической реализации совершенных автоматических управляемых систем.
Основным и наиболее эффективным при применении и реализации принципа инвариантности является класс комбинированных систем автоматического управления, в которых выполняется условие двухканальности.
Комбинированные АСР
Комбинированные системы представляют собой одну из самых значительных областей применения принципа инвариантности в автоматике и управлении. В настоящее время по комбинированной схеме управления, представляющей собой сочетание систем с замкнутой и разомкнутой цепями управления, строятся почти все следящие приводы динамических платформ, многие артиллерийские следящие приводы, некоторые маломощные следящие системы, применяемые в электромеханических интеграторах, и т. п.
Комбинированные системы регулирования применяются при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
Имеется два способа построения комбинированной системы.
Сигнал от компенсатора -подается на вход объекта либо на вход регулятора. Ниже приведена одна из структур комбинированной АСР.
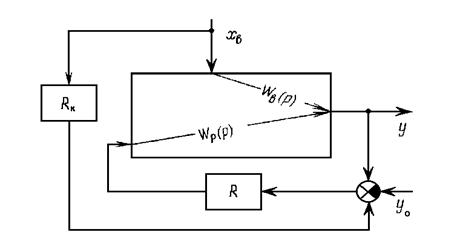
Рисунок 1 - Структурная схема комбинированной АСР при подключении выхода компенсатора на вход регулятора
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты системы от заданного значения должно быть равным нулю при любых задающих или возмущающих воздействиях.
Рассмотрим условие инвариантности по отношению к одному возмущающему воздействию.
Y(p) = X в (p) [W в (p) + R к (p) W р (p)] º 0. (1)
Отсюда, при наличии возмущения получим
R к (p) = - W в (p) / W р (p). (2)
Для структурной схемы показанной на рисунке 1 уравнение примет вид:
R к (p) = - W в (p) / R (p) W р (p). (3)
Идеальная компенсация физически нереализуема в двух случаях:
Если время чистого запаздывания по каналу регулирования больше, чем по каналу возмущения.
Если в передаточной функции компенсатора степень полинома в числители больше, чем степень полинома знаменателя.
При практической реализации разомкнутых и комбинированных АСР обычно добиваются приближенной инвариантности системы по отношению к рассматриваемому возмущению в наиболее опасном диапазоне частот. При этом реальный компенсатор выбирают из числа наиболее легко реализуемых динамических звеньев, параметры которых рассчитывают из условия близости частотных характеристик идеального и реального компенсатора в этом диапазоне частот.
[R и (iw)] @ [R р (iw)] при w н £ w £ w в. (4)
Обычно основная мощность сигналов сосредоточена в низких частотах от 0 до wв, поэтому условие приближенной инвариантности чаще всего записывают для двух частот w = 0 и w = w р.
Расчет комбинированной АСР производят следующим образом:
1. расчет настроек регулятора и определение рабочей частоты в одноконтурной системе регулирования
2. вывод передаточной функции идеального компенсатора на условиях инвариантности и анализ его реализуемости
3. выбор реального компенсатора и определение его параметров из условий приближенной инвариантности в наиболее существенном для системы диапазоне частот
Типовые компенсаторы:
Апериодическое звено 1-го порядка - W(p) = k / (Tp+1).
Реальное дифференцирующее звено - W(p) = T1 p / (T2 p+1).
Интегро – дифференцирующее звено - W(p) = k * (T1 p+1) / (T2p+1).
Неминимально – фазовое звено - W(p) = k * (1 – T p) / (1+Tp).
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 3767; Нарушение авторских прав?; Мы поможем в написании вашей работы!