КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дискретное описание систем в пространстве состояний
Описание дискретных систем в пространстве состояний аналогично по форме описанию непрерывных систем. Путем введения промежуточных переменных (координат состояния) динамика дискретной системы управления или объекта представляется разностными уравнениями первого порядка.
 (3.31)
(3.31)
и уравнением выхода
 (3.32)
(3.32)
Уравнение (3.31) и (3.32) аналогичны по форме уравнениям (3.3). Поэтому матричное (векторное) представление дискретного объекта или всей системы будет иметь вид, аналогичный (3.7)
 (3.33)
(3.33)
где X(k) – вектор дискретного (в моменты времени kT) состояния объекта;
A*, B*, C* – коэффициенты матрицы соответствующих размерностей.
Индекс * в (3.33) означает принадлежность к дискретному описанию объекта. В очевидных случаях этот индекс будет опускаться.
На рис.3.7 представлена структурная схема дискретного описания.n-мерного объекта в пространстве состояний аналогичная структуре непрерывного описания в пространстве состояний (рис.3.2). Оператор Z-1 означает задержку по времени на один период.
Рис.3.7. Структурная схема дискретного описания
n-го объекта в пространстве состояний
В общем случае исходное описание объекта управления представляет дискретную передаточную функцию W(z) или непрерывную W(p) или систему уравнений (3.37). Рассмотрим способы перехода от этих форм описания к дискретной модели описания в пространстве состояний, т.е. в виде системы уравнений (3.33).
Наиболее простой переход к описанию в пространстве состояний осуществляет описание объекта разностным уравнением n-порядка. Если за координаты состояния принять следующие переменные
xi(k+1)=xi+1(k) или xi(k)=Dxi-1(k),
то систему n-го порядка можно представить в виде n разностных уравнений первого порядка. В векторной форме система этих уравнений имеет вид
 (3.34)
(3.34)

Дискретное описание (3.34) аналогично по форме непрерывному описанию (3.18), где индекс * означает каноническую форму записи. Очевидно, что система (3.34) также представляет каноническую форму управляемости дискретного описания объекта. Поэтому коэффициенты матриц в уравнении (3.34) связаны с коэффициентами разностного уравнения теми же соотношениями, что и для непрерывного описания (3.19). Если объект описан дискретной W(z) вида (3.23), то переход к описанию в форме (3.34) также осуществляется с помощью соотношений (3.19).
При исходном описании объекта непрерывной функцией W(p) необходимо сначала определить дискретную передаточную функцию W(z), используя точный (1.12) или приближенные методы (1.17) методы. Затем, как и в предыдущем случае, дискретная модель представляется в форме (3.34).
Рассмотрим применение этого метода на примере электродвигателя постоянного тока. В исполнительных механизмах чаще всего применяются электродвигатели малой мощности, которые имеют малую индуктивность якорной цепи. Поэтому во многих случаях постоянной времени ТЯ в передаточной функции можно пренебречь. Кроме того необходимо учесть, что на вход двигателя подается последовательность импульсов, шириной Т. С учетом этого дискретная передаточная функция согласно (1.29) определяется следующим образом
 , (3.35)
, (3.35)
где  .
.
Используя таблицу, получим
где  ,
,  ,
,  ,
,
 ,
,  .
.
Из соотношения (3.19) определяем коэффициенты модели (3.34)
В результате получаем систему уравнений
 (3.36)
(3.36)

Структурная схема, соответствующая этой системе представлена на рис.3.8.
 |
Рис.3.8. Структурная схема дискретной модели второго
порядка электродвигателя постоянного тока
В тех случаях, когда непрерывное описание объекта дано в пространстве состояний, для перехода к дискретному описанию целесообразно применять прямой метод решения дифференциального уравнения. Рассмотрим на примере объект первого порядка (1.3). Воспользуемся решением этого уравнения (3.25), приняв за начальное значение координат x[kT], можно записать, что
 . (3.37)
. (3.37)
Для сокращения записи выражения (3.37), как правило, представляют в относительном времени
 ,
,
где  ,
,  .
.
Для объекта n-го порядка по аналогии с объектом первого порядка, используя решение матричного уравнения (3.26), получим
 ,
,
или
 , (3.38)
, (3.38)
где  ,
,  .
.
Определение матриц А -1 и А * наиболее просто производится путем представления экспоненциальной функции степенным рядом (3.27) и удержания только первых двух слагаемых:
 (3.39)
(3.39)
Допустимость применения выражения (3.39) осуществляется в основном третьим слагаемым. Очевидно, что чем меньше период квантования Т по сравнению с постоянной времени объекта, тем аппроксимация (3.39) будет более точной. При Т £ 0,5То min, где То min – минимальная постоянная объекта, аппроксимация (3.39) дает допустимо малую погрешность.
В качестве примера получим точное дискретное описание электродвигателя постоянного тока, непрерывное описание которого представлено системой (3.12). Для определения коэффициентов матрицы А * в модели вида (3.38) воспользуемся методом Кэли-Гамильтона (формулы (3.28), (3.30)). Согласно (3.12) и (3.13)
или

корни этого уравнения
 ;
; 
В соответствии с (3.29) получим следующую систему уравнений
Решая эту систему, получим:
 (3.40)
(3.40)
В соответствии с (3.28)

Подставляя в это уравнение значения коэффициентов (3.40), матрицы  (выражение (3.17)) и матриц
(выражение (3.17)) и матриц  , получаемую перемножением матрицы самой на себя, окончательно получим:
, получаемую перемножением матрицы самой на себя, окончательно получим:
 , (3.41)
, (3.41)

Для определения матрицы ` В* необходимо найти ` А -1. Однако из-за того, что один из корней характеристического уравнения равен нулю, т. е. матрица А особая, выражением (3.18) для определения В* применять нельзя. Поэтому определим следующим образом. По аналогии с (3.24) можно записать, что
 . (3.42)
. (3.42)
Подставляя в (3.42) выражение для ` А* (3.41) и ` В получим
 ,
,
где  значения соответствующих коэффициентов при замене Т на -t.
значения соответствующих коэффициентов при замене Т на -t.
После взятия интеграла и перемножения матриц получим
 . (3.43)
. (3.43)
Выражая для коэффициентов матрицы-столбца В* не приводятся из-за их громоздкости. Как видно, аналитический расчет коэффициентов матриц дискретной модели довольно сложен, поэтому целесообразно определять их численным способом.
Окончательно, дискретная модель электродвигателя в пространстве состояний будет иметь вид
 , (3.44)
, (3.44)

Структурная схема дискретной модели электродвигателя с цифровым датчиком относительно "естественных" координат состояния представлена на рис.3.9. В ее состав введен дискретный измеритель угла поворота вала
двигателя за период Т. По такому принципу работает большинство цифровых датчиков, которые являются одновременно измерителями скорости и угла. По существу измеряется угол поворота за период Т (средняя скорость).

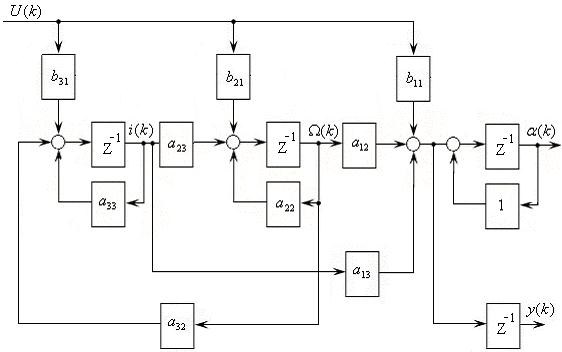
Рис 3.9.
Величина угла поворота определяется последовательным суммированием информации, снимаемой с датчика. Из системы (3.44) следует, что

Т. к.  , окончательно получаем
, окончательно получаем
 (3.45)
(3.45)
Выражение (3.45) представлено на структурной схеме отдельным выходом. Из структурной схемы следует, что при использовании цифрового измерителя рассмотренного типа мгновенное значение скорости W(k) остается не измеряемым.
Для проведения анализа и синтеза цифровой системы управления электродвигателем его модель удобно представить в канонической форме управляемости (3.34). Для этого первоначально определяем дискретную передаточную функцию, исходя из непрерывной передаточной функции двигателя точным (1.49) или приближенным (1.54) методами, или определяем эту передаточную функцию из системы (3.44) по формуле, аналогичной для непрерывной передаточной функции (3.21)
 (3.46)
(3.46)
Затем по формулам (3.19) определяются коэффициенты матриц А*k и B*k канонической формы.
Если принять в качестве выходной координаты сигнал, выдаваемый датчиком, то получим следующую модель в канонической форме:
 (3.47)
(3.47)
где  – "искусственные" координаты состояния в новом базисе;
– "искусственные" координаты состояния в новом базисе;
Полученная модель(структурная схема представлена на рис. 3.10) содержит меньшее число элементов, чем исходная.
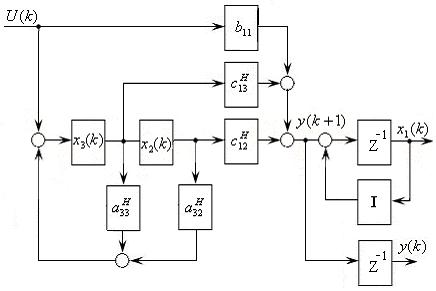
Рис. 3.10.
Проведенные преобразования показывают, что получение дискретной модели объекта - довольно трудоемкая процедура. Поэтому обычно используют специальные программы расчета. Целесообразность применения того или иного вида модели определяется соотношением параметров объекта, величиной квантования по времени и решаемой задачей анализа или синтеза САУ. Наиболее просто можно получать дискретную модель, используя аппроксимацию (3.39). Ее применение дает следующую модель двигателя:
 (3.48)
(3.48)
Эта модель дает малые погрешности при условии, что Т £0,5 Тя
Таким образом, мы получаем четыре различные формы дискретного описания (моделей) электродвигателя постоянного тока: без учета индуктивности якорной цепи (рис.3.8); точную модель относительно "естественных" координат (рис. 3.9); точную модель в канонической форме (рис.3.10) и приближенную модель (выражение (3.48)).
|
Дата добавления: 2014-01-11; Просмотров: 4771; Нарушение авторских прав?; Мы поможем в написании вашей работы!