КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структурные схемы. Способы соединения звеньев
|
|
|
|
Типовые динамические звенья
1. Безынерционное W(p) = k
2. Апериодическое первого порядка W(p) = k/(Tp+1)
3. Апериодическое второго порядка W(p) = k/[(T1p+1)(T2p+1)]
4. Колебательное W(p) = k/(T2p+2xTp+1)
5. Идеальное колебательное (консервативное) W(p) = k/(T2p+1)
6. Идеальное интегрирующее W(p) = k/p
7. Интегрирующее W(p) = k/[p(Tp+1)]
8. Идеальное дифференцирующее W(p) = kp
9. Дифференцирующее W(p) = kp/(Tp+1)
10. Изодромное (позиционное) W(p) = (Tp+1)/p
Задание
Для каждого звена знать:
- дифференциальное уравнение,
- передаточную функцию,
- частотную передаточную функцию,
- выражения и графики временных характеристик – переходной функции и функции веса,
- выражения и графики частотных характеристик – АЧХ, ФЧХ, АФЧХ, ЛАЧХ, ЛФЧХ,
- примеры устройств, реализующих работу данного звена
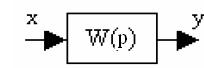
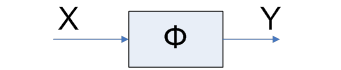
1. Звено с одним входом и одним выходом: Y(p)=W(p)X(p)
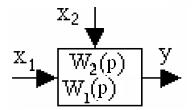
2. Звено с двумя входами и одним выходом (около каждого входа записывается своя передаточная функция): Y(p)=W1(p)X1(p)+W2(p)X2(p)
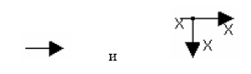
3. Линия связи и узел (разветвление), стрелка показывает направление передачи информации
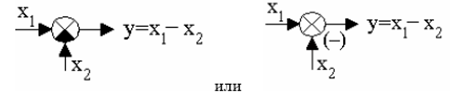
3. Сумматор (элемент сравнения)
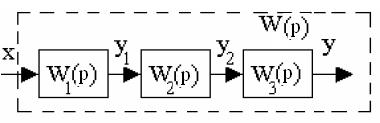
5. Последовательное соединение звеньев Y(p) = W(p)X(p) = [W1(p)W2(p)W3(p)]X(p)
n
W(p) = PWi(p)
i=1
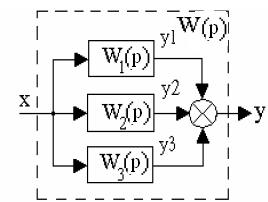
6. Параллельное соединение звеньев Y(p) = W(p)X(p) = [W1(p)+W2(p)+W3(p)]X(p)
n
W(p) = SWi(p)
i=1
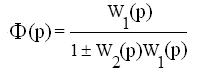
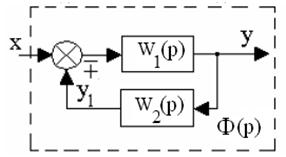
7. Соединение звеньев с обратной связью Y(p) = Ф(p) X(p)
8. Перенос сумматора
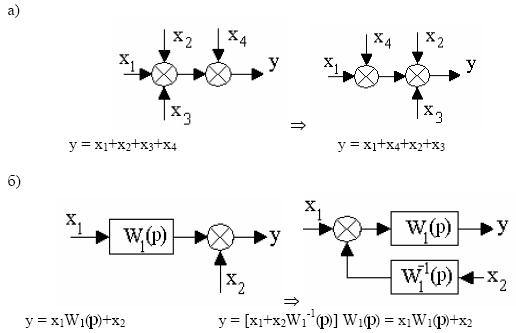
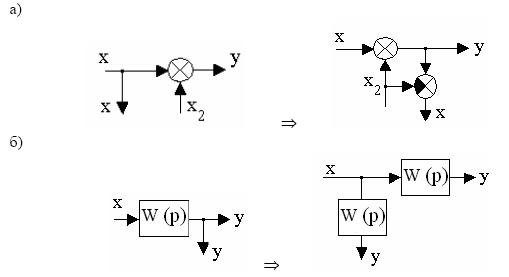
9. Перенос узла
Пример преобразования структурной схемы САУ
Исходная система
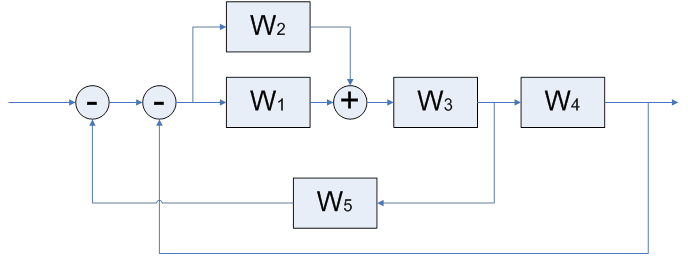
Шаг 1. Блоки W1 и W2 соединены параллельно: W12 = W1+W2
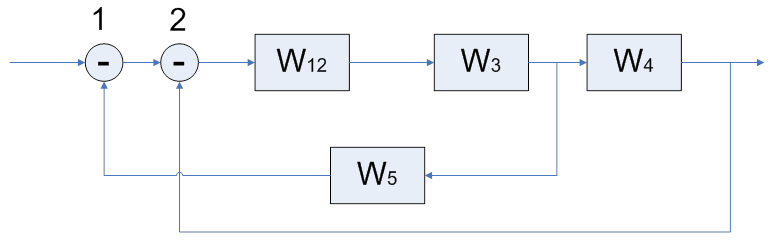
Шаг 2. Блоки W12 и W3 соединены последовательно: W123 = W12W3
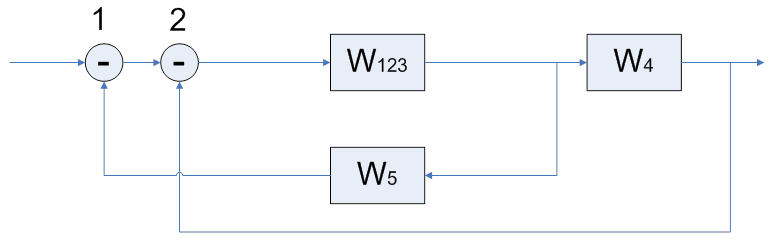
Шаг 3. Меняем местами сумматоры 1 и 2
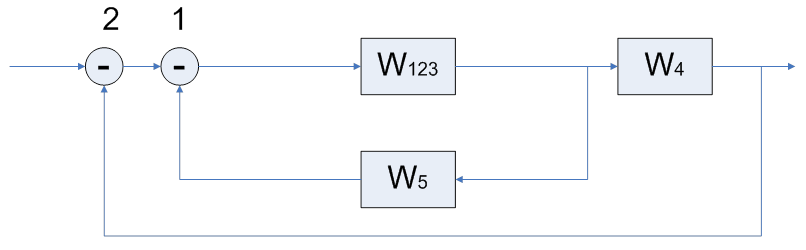
Шаг 4. Блоки W123 и W5 соединены с обратной связью: Ф1235 = W123 / 1+ W123W5
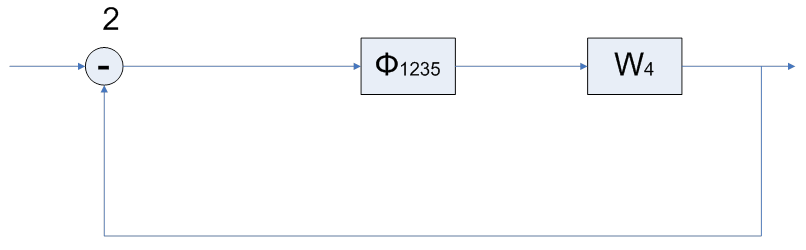
Шаг 5. Блоки Ф1235 и W4 соединены последовательно: Ф12345 = Ф1235 W4
|
|
|
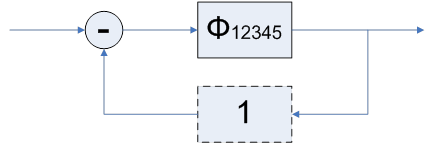
Шаг 6. Блоки Ф12345 и 1 соединены с обратной связью: Ф = Ф12345 / 1+ Ф12345
Типовые передаточные функции САУ
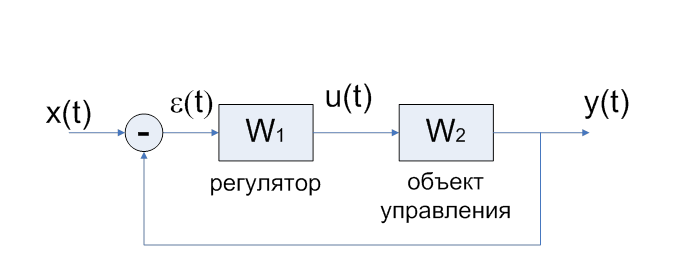
x(t) – входной сигнал (задающее воздействие)
y(t) – выходной сигнал (регулируемый параметр)
e(t) – сигнал ошибки (рассогласования)
u(t) – управляющее (регулирующее) воздействие
f(t) – возмущающее воздействие (помеха)
W1(p) – передаточная функция регулятора
W2(p) – передаточная функция объекта управления
|
|
|
|
|
Дата добавления: 2014-10-22; Просмотров: 632; Нарушение авторских прав?; Мы поможем в написании вашей работы!