КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Соотношение скоростей в высшей кинематической паре
С ВЫСШИМИ ПАРАМИ
Вращающееся ведомое звено
|
а) б)
в)
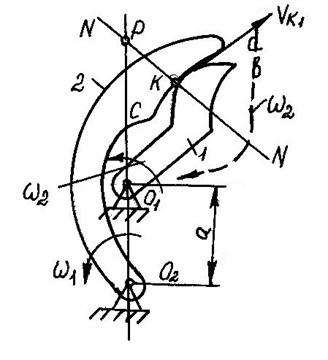
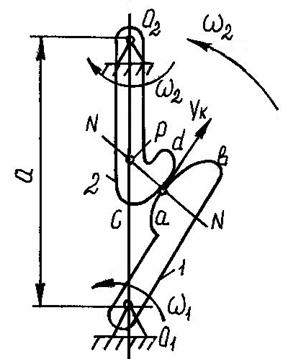
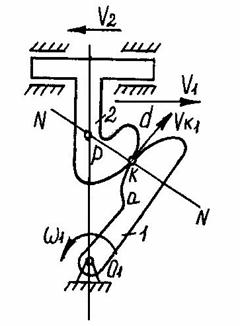
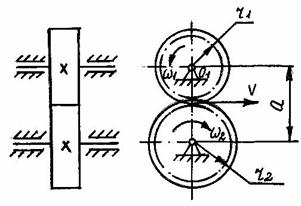
Рис. 3.1. К теореме о соотношении скоростей в высшей кинематической паре
Предположим, что движение от ведущего звена 1 к ведомому 2, вращающихся вокруг параллельных осей О1 и О2, передается при помощи высшей кинематической пары (рис. 3.1). Рабочими профилями звеньев являются кривые ab и cd.
Если сообщить всей системе вращение с угловой скоростью (-w2), то первое звено будет совершать два вращательных движения: с угловой скоростью w1 вокруг оси О1 и с угловой скоростью (-w2) вокруг оси О2, а второе будет неподвижным. На основании теоремы о сложении угловых скоростей оба эти движения можно заменить одним - вокруг мгновенной оси вращения - с относительной угловой скоростью W = w1+ (- w2).
Как известно, при этом положение мгновенного центра вращения (МВЦ) - точки Р, через который проходит мгновенная ось вращения (перпендикулярно к плоскости рисунка), в относительном движении определяется отношением:
 (3.1)
(3.1)
При внешнем касании положение МВЦ (точки Р) находится между центрами О1 и О2 (рис. 3.1, а), отрезки РО1 и РО2 имеют разное направление, и звенья 1 и 2 вращаются в разные стороны; если же точка Р находится по одну сторону от центров О1 и О2 (внутреннее касание), то отрезки РО1 и РО2 имеют одинаковое направление (рис. 3.1, б) и звенья 1 и 2 вращаются в одну сторону.
Относительная скорость точки контакта К, принадлежащей звену 1, uк = WLPK направлена перпендикулярно к отрезку РК в сторону, определяемую направлением W. Так как относительная скорость uк всегда направлена по общей касательной к профилям cd и ab в точке К, то отрезок РК является нормалью к соприкасающимся профилям в точке К. На основании указанного можно так сформулировать теорему о соотношении скоростей в высшей паре: нормаль в точке контакта профилей двух звеньев, совершающих вращательное движение, делит межосевое расстояние на отрезки, длины которых обратно пропорциональны угловым скоростям этих звеньев.
Поступательно движущееся звено. Когда ведомое звено, образующее с ведущим высшую кинематическую пару, совершает поступательное движение с линейной скоростью u2 (рис. 3.1, в), положение МЦВ в относительном получают аналогичным путем. При этом нормаль к соприкасающимся профилям в точке их контакта отсекает на перпендикуляре, опущенном из центра вращения ведущего звена на направление движения ведомого звена, отрезок О1Р =  .
.
Геометрические места положений МВЦ на ведущих и ведомых звеньях представляют собой центроиды в относительном движении. Форма центроид зависит от соотношения скоростей этих звеньев.
Аксоидные поверхности
|
а) в)
|
б) г)
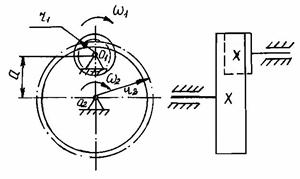
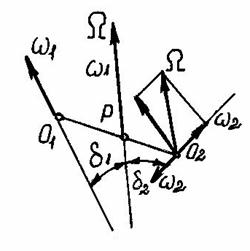
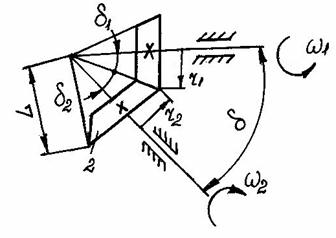
Рис. 3.2. К определению аксоидных поверхностей
Геометрическое место мгновенных осей вращения образует в относительном движении аксоиды. При передаче вращения между звеньями, оси которых параллельны, аксоиды представляют собой цилиндры (рис. 3.2, а - при внешнем касании, рис. 3.2, б - при внутреннем касании).
При передаче вращения между звеньями, оси вращения которых пересекаются, аксоидами относительного движения являются конусы с общей вершиной в точке О пересечения осей (рис. 3.2, в), а линия ОР будет мгновенной осью вращения.
В случае передачи вращения между двумя звеньями, оси которых перекрещиваются в пространстве (рис. 3.2, г), аксоиды представляют собой два гиперболоида вращения. Мгновенная ось вращения в этом случае проходит через точку Р, делящую кратчайшее расстояние О1О2 между осями в отношении:
 ,
,
где d1 и d2 - углы, образованные осями звеньев с осью мгновенного вращения и скольжения, которая должна быть параллельной вектору относительной скорости  . Передача движения от ведущего звена к ведомому при наличии высшей кинематической пары может происходить двояко:
. Передача движения от ведущего звена к ведомому при наличии высшей кинематической пары может происходить двояко:
1) за счет перекатывания без скольжения друг по другу звеньев, выполненных по форме аксоидов. В этом случае движение передается за счет сил трения, возникающих в зоне контакта этих звеньев при надавливании их друг на друга (фрикционные механизмы).
2) за счет давления звеньев (одного на другое), очерченных по определенным профилям (кулачковые и зубчатые механизмы). В этом случае между профилями, передающими движение, происходит не только перекатывание, но и относительное скольжение.
3)
Передаточное отношение.
Для двух звеньев 1 и 2, вращающихся с угловыми скоростями w1 и w2 под передаточным отношением понимают отношение их угловых скоростей:
 и
и  (3.2)
(3.2)
Если движение осуществляется между параллельными осями, то передаточное отношение имеет знак "плюс", если угловые скорости звеньев имеют одно направление и знак "минус", если направления противоположны.
Независимо от принципа осуществления передачи вращения (трениям или давлением) на основании формулы (3.1) при внешнем контакте (рис. 3.2, а):
 (3.3)
(3.3)
при внутреннем контакте (рис. 3.2, б):
 (3.4)
(3.4)
Для механизмов, в состав которых входят низшие пары, передаточное отношение представляет собой отношение линейных скоростей.
Передаточное отношение может быть выражено также через отношение угловых или линейных перемещений:
 или
или  (3.5)
(3.5)
Механизмы можно разделить на две группы: с постоянным передаточным отношением и переменным. К первой относятся зубчатые и фрикционные механизмы, аксоидами которых являются цилиндры, конусы, гиперболоиды вращения, ко второй - кулачковые механизмы и механизмы с некруглыми зубчатыми колесами.
|
|
Дата добавления: 2014-10-31; Просмотров: 365; Нарушение авторских прав?; Мы поможем в написании вашей работы!