КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Сельсинная следящая дистанционная передача
|
|
|
|
(сельсины в трансформаторном режиме)
Следящая дистанционная передача переменного тока с использованием сельсинов работает так же, как круговая следящая потенциометрическая передача постоянного тока, рассмотренная ранее. Поэтому передачи имеют одинаковую блок-схему (рис. 2.7).
Различие между указанными передачами заключается в основном в конструкции и принципе действия сельсин-датчиков (СД)и сельсин-приемников (СП),применяемых в передаче переменного тока, по сравнению спотенциометрическими датчиками и приемниками, применяемыми в передаче постоянного тока.

|
| Рис. 2.13. Электрическая схема соединения сельсинов, работающих в трансформаторном режиме |
Рассмотрим более детально работу сельсинной схемы (датчика и приемника) передачи.
Как уже отмечалось, сельсины в следящей дистанционной передаче работают в трансформаторном режиме.
Электрическая схема соединения сельсинов для данного режима показана на рис. 2.13.
Трансформаторный режим работы сельсинов позволяет получить электрический сигнал (в виде напряжения U вых), пропорциональный углу рассогласования двух механически не связанных между собой осей (валов). Для этого ротор сельсин-датчика (СД)жестко соединен с командной осью следящей системы, а ротор сельсин-приемника (СП) - сисполнительной осью.
Входной величиной для сельсинной схемы является угол рассогласования в между угловыми положениями командной и исполнительной осей следящей системы, или, иначе, между осями роторов СД и СП.
Питание датчика (U п)осуществляется переменным током, который подводится к обмотке ротора СД. Из схемы (рис. 2.13) видно, что в рассматриваемом режиме однотипные фазы статорных обмоток СД и СП соединены между собой трехпроводной линией. Электрическая энергия источника питания трансформируется (передается) от обмотки ротора СД к обмотке статора СД и далее через обмотку статора СП в роторную обмотку СП. Поэтому данный режим работы сельсинов и принято называть трансформаторным.
|
|
|
Выходной величиной сельсинной схемы является напряжение U вых, снимаемое с роторной обмотки СП. Величина U вых, как будет показано ниже, пропорциональна углу рассогласования в роторов СД и СП,Таким образом, трансформаторный режим работы сельсинов позволяет измерять угол рассогласования в следящей системе.
Работа сельсинов протекает в такой последовательности. Под действием напряжения питания U п,приложенного к обмотке ротора СД, образуется изменяющийся во времени поток ФРД ротора датчика. Обмотка ротора СД является обмоткой возбуждения сельсина. Вектор потока ФРД всегда совпадает с осью ротора СД. Пусть ось потока ФРД направлена под углом α к оси первой фазы обмотки статора СД. За счет потока ФРД в катушках статорных обмоток СД индуктируются переменные ЭДС: Е 1, Е 2, Е 3,совпадающие по фазе и частоте. Так как фазы этих ЭДС всегда одинаковы, то обмотки статора сельсина, как уже отмечалось, можно лишь условно называть трехфазными. В действительности это три катушки, образующие однофазную (а не трехфазную) систему.
Действующие значения переменных ЭДС Е 1, Е 2, Е 3равны
 ;
;
 ; (2.1)
; (2.1)
 .
.
Здесь  ФРД - максимальное действующее, значение ЭДС, наводимой в обмотке, когда ось данной обмотки совпадает с осью обмотки ротора; ω - эффективное число витков в одной катушке (фазе) статорной обмотки.
ФРД - максимальное действующее, значение ЭДС, наводимой в обмотке, когда ось данной обмотки совпадает с осью обмотки ротора; ω - эффективное число витков в одной катушке (фазе) статорной обмотки.
Под действием ЭДС Е 1, Е 2, Е 3по статорным обмоткам СД и СП и соединительным проводам протекают токи соответственно I 1, I 2, I 3. Для того чтобы определить величину этих токов, соединим мысленно средние точки О и О' статорных обмоток СД и СП дополнительным проводом. При наличии такого провода отдельные фазы (катушки) статорных обмоток становятся обособленными и тогда выражения для токов I 1, I 2, I 3можно записать так:
|
|
|
 ;
;  ;
;  . (2.2)
. (2.2)
Здесь Z - сумма полных сопротивлений двух статорных катушек: катушки СД и соединенной с ней катушки СП. Для сельсинов, имеющих ротор с неявно выраженными полюсами или с широкой полюсной дугой, сопротивления катушек обмотки статора можно считать одинаковыми Z 1 =Z 2 =Z 3 =Z и не зависящими от угла поворота ротора сельсина. Ток в четвертом проводе равен сумме токов:
 . (2.3)
. (2.3)
Тогда с учетом выражений (5.1) и (5.2) получим
 . (2.4)
. (2.4)
Ток I 0 всегда равен нулю (I 0 = 0), так как величина, заключенная в квадратные скобки в выражении (2.4), тождественно равна нулю. Следовательно, четвертый провод, соединяющий точки О и О' сельсинов, не нужен. Это означает, что выражения (2.2) для токов I 1, I 2 и I 3справедливы и для реальной схемы соединения сельсинов (рис. 2.13) без дополнительного, четвертого провода. Таким образом, токи I 1, I 2, I 3в отдельных катушках статоров сельсинов согласно выражениям (2.2) пропорциональны соответствующим ЭДС Е 1, Е 2, Е 3, причем коэффициент пропорциональности для всех трех токов один и тот же, равный -  . Каждый из этих токов, протекая по соответствующей катушке (фазе) обмотки статора СП,создает поток данной катушки соответственно Ф1, Ф2,Ф3. Ось каждого из этих потоков всегда совпадает с осью своей катушки.
. Каждый из этих токов, протекая по соответствующей катушке (фазе) обмотки статора СП,создает поток данной катушки соответственно Ф1, Ф2,Ф3. Ось каждого из этих потоков всегда совпадает с осью своей катушки.
Выражения для потоков отдельных катушек можно записать в следующем виде:
 ;
;
 ; (2.5)
; (2.5)
 .
.
Коэффициент а имеет вид
 ,
,
где  - магнитное сопротивление потоку одной статорной обмотки, которое для сельсинов с неявно выраженными полюсами на роторе (или с широкой полюсной дугой) практически не зависит от величины α.
- магнитное сопротивление потоку одной статорной обмотки, которое для сельсинов с неявно выраженными полюсами на роторе (или с широкой полюсной дугой) практически не зависит от величины α.
Результирующий поток ФСП статора сельсин-приемника, созданный тремя катушками, всегда направлен относительно оси первой катушки под углом α, т. е. так же, как и поток ФРД ротора СД относительно оси первой катушки статора СД. Другими словами, поток ФСП статора сельсин-приемника всегда имеет одинаковое направление с исходным потоком сельсинной схемы, т. е. потоком ФРД ротора сельсин-датчика.
В этом нетрудно убедиться, если определить продольную ФСПx и поперечную ФСПy составляющие результирующего потока ФСП по оси первой катушки статора.
|
|
|
Учитывая, что результирующий поток ФСП создается тремя катушками, выражения для указанных составляющих ФСПx и ФСПy этого потока можно записать как алгебраическую сумму соответствующих составляющих потоков от каждой катушки:
 ;
;

или с учетом выражений (2.5):
 ;
;
 .
.
Из полученных выражений видно, что результирующий поток ФСП статора СП действительно направлен под углом α к оси первой катушки и численно равен  .
.
Таким образом, вектор потока статора сельсин-приемника ФСП всегда совпадает по направлению с осью ротора сельсин-датчика при любом значении угла α. К этому выводу можно прийти и другим путем. Действительно, поток ФСП статора СП индуктирует в каждой катушке статора СП ЭДС соответственно Е' 1, Е' 2, Е' 3.
Если пренебречь падением напряжения от токов I 1, I 2, I 3 на сопротивлениях обмоток статоров СД и СП и соединительных проводов, то ЭДС Е' 1, Е' 2, Е' 3обмоток статора СП должны уравновешивать соответствующие ЭДС Е 1, Е 2, Е 3обмоток статора СД,т. е. будут выполняться равенства:
 (2.6)
(2.6)
Но ЭДС Е 1, Е 2, Е 3индуктируются за счет потока ФРД ротора сельсин-датчика, а ЭДС Е' 1, Е' 2, Е' 3- соответственно за счет результирующего потока ФОП статора сельсин-приемника. Из условия равенства этих ЭДС следует, что потоки ФРД и ФОП должны иметь одинаковое направление.
Итак, при трансформаторном режиме работы сельсинов вектор потока ФСП сельсин-приемника синхронно следует за осью ротора сельсин-датчика. Эта важная особенность работы сельсинов в трансформаторном режиме и позволяет получить на выходе схемы сигнал U вых,пропорциональный углу рассогласования осей следящей системы. Действительно, в обмотке ротора сельсин-приемника индуктируется за счет потока ФСП ЭДС (напряжение), величина которой пропорциональна данному потоку ФСП.

|
| Рис. 2.14. Статическая характеристика сельсинов, работающих в трансформаторном режиме |
Причем если за исходное положение сельсинов брать такое положение, при котором оси роторов СД и СП совпадают, то при отсутствии рассогласования в следящей системе
(Θ = 0) напряжение на выходе U выхбудет иметь максимальное значение. Следовательно, согласованному положению осей следящей системы в этом случае будет соответствовать максимальное значение выходного сигнала U вых.макс, что неудобно. Поэтому за согласованное положение сельсинов берут такое, при котором оси роторов СД и СП сдвинуты на угол, равный  (так же, как и в потенциометрической следящей передаче). Тогда при согласованном положении осей следящей системы сигнал на выходе сельсинной схемы U вых = 0.
(так же, как и в потенциометрической следящей передаче). Тогда при согласованном положении осей следящей системы сигнал на выходе сельсинной схемы U вых = 0.
|
|
|
С учетом этого обстоятельства выражение для U вых0при холостом ходе сельсинного датчика можно записать так:
 , (2.7)
, (2.7)
где  - максимальное значение ЭДС, наводимой в обмотке ротора СП при рассогласовании роторов (Θ = 90º).
- максимальное значение ЭДС, наводимой в обмотке ротора СП при рассогласовании роторов (Θ = 90º).
Таким образом, статическая характеристика рассматриваемой сельсинной схемы U вых = f (Θ) при холостом ходе (нагрузка в цепи обмотки ротора СП отсутствует) имеет вид синусоиды (рис. 2.14).
При малых углах рассогласования эту зависимость можно приближенно считать прямолинейной:
 , (2,8)
, (2,8)
где угол Θ выражен в радианах.
Изменение знака угла рассогласования в приводит к изменению фазы выходного сигнала U вых0 на 180°. Чувствительность (коэффициент усиления) сельсинной схемы определяется выражением
 .
.
Для датчиков, применяемых в авиационном оборудовании, величина k составляет примерно 1 В/град.
Необходимо отметить, что полученные выражения (2.7) и (2.8) являются приближенными, поскольку при выводе их предполагалось, что поле в воздушном зазоре между статором и ротором сельсина распределено по закону синуса, магнитопровод не насыщен, параметры катушек обмоток статоров СД и СП одинаковы. В существующих конструкциях сельсинов эти условия практически выполняются.
При нагружении роторной обмотки сельсин-приемника на сопротивление нагрузки Z H напряжение на выходе датчика U выхнесколько уменьшается по сравнению с его значением при холостом ходе датчика U вых0. Кроме того, может нарушаться синусоидальный характер зависимости U вых = f (Θ) (особенно если нагрузка велика) за счет обратного действия (реакции якоря) потока ФРП обмотки ротора СП по отношению потока ФСП статора СП.
В следящей системе сигнал с сельсинного датчика подается на вход усилителя. Если при этом входное сопротивление усилителя велико, как, например, в усилителе, выполненном на электронных лампах, то режим работы сельсинов близок к холостому ходу и учитывать влияние нагрузки Z H на величину выходного напряжения U вых нет необходимости.
Дифференциальный сельсин (ДС)
Конструктивно ДС,как уже отмечалось, подобен сельсин-датчику и сельсин-приемнику. Основное отличие ДС при этом определяется тем, что у него обе обмотки (статорная и роторная) трехфазные. Подвод тока к обмоткам ротора осуществляется через три кольца и три щетки. Ротор ДС неявно полюсный. Дифференциальный сельсин включается между сельсин-датчиком и сельсин-приемником. Его статорная (или роторная) обмотка соединена трехпроводной линией со статорной обмоткой СД, а роторная (или статорная) обмотка таким же способом соединена со статорной обмоткой СП (рис. 2.15).
Статор ДС обычно закреплен неподвижно, а ротор соединяется с осью устройства, с помощью которого задают некоторое исходное (начальное) значение угла рассогласования δ. Дифференциальный сельсин представляет собой устройство, с помощью которого данное начальное значение угла рассогласования δвводится в следящую систему. Если оси одноименных обмоток статора и ротора ДС совпадают, т. е. угол поворота ДС равен нулю, то ДС никаких изменений в сельсинную схему не вносит (кроме некоторого уменьшения выходного напряжения).

|
| Рис. 2.15. Схема включения дифференциального сельсина |
Действительно, поле статора ДС, как и в ранее рассмотренном случае без ДС (рис. 2.13), имеет такое же относительное направление, что и поле ротора сельсин-датчика.
В свою очередь, поле статора СП имеет такое же направление, что и поле статора ДС. Следовательно, в данном случае поле статора СП имеет одинаковое направление с полем ротора СД,т. е. так же, как это имело место в сельсинной схеме (рис. 2.13) без ДС.
Если угол поворота ДС не равен нулю, то картина меняется. Действительно, поворот ротора ДС на угол δэквивалентен повороту ротора СД на угол δ.
При наличии дифференциального сельсина выходное напряжение U вых0 сельсинной схемы (рис. 2.15) В общем случае определяется суммой (алгебраической) углов поворота роторов сельсин-датчика и дифференциального сельсина относительно ротора сельсин-приемника:
 .
.
Рассмотрим некоторые параметры, характеризующие сельсины в трансформаторном режиме.
По динамическим свойствам сельсины в трансформаторном режиме аналогичны индуктивному датчику.
Действительно, частота изменения входного сигнала - угла рассогласования в осей следящей системы существенно меньше частоты f питающего напряжения. Поэтому сельсинный датчик, так же как и индуктивный, можно считать безынерционным звеном (U вых = k Θ).
|
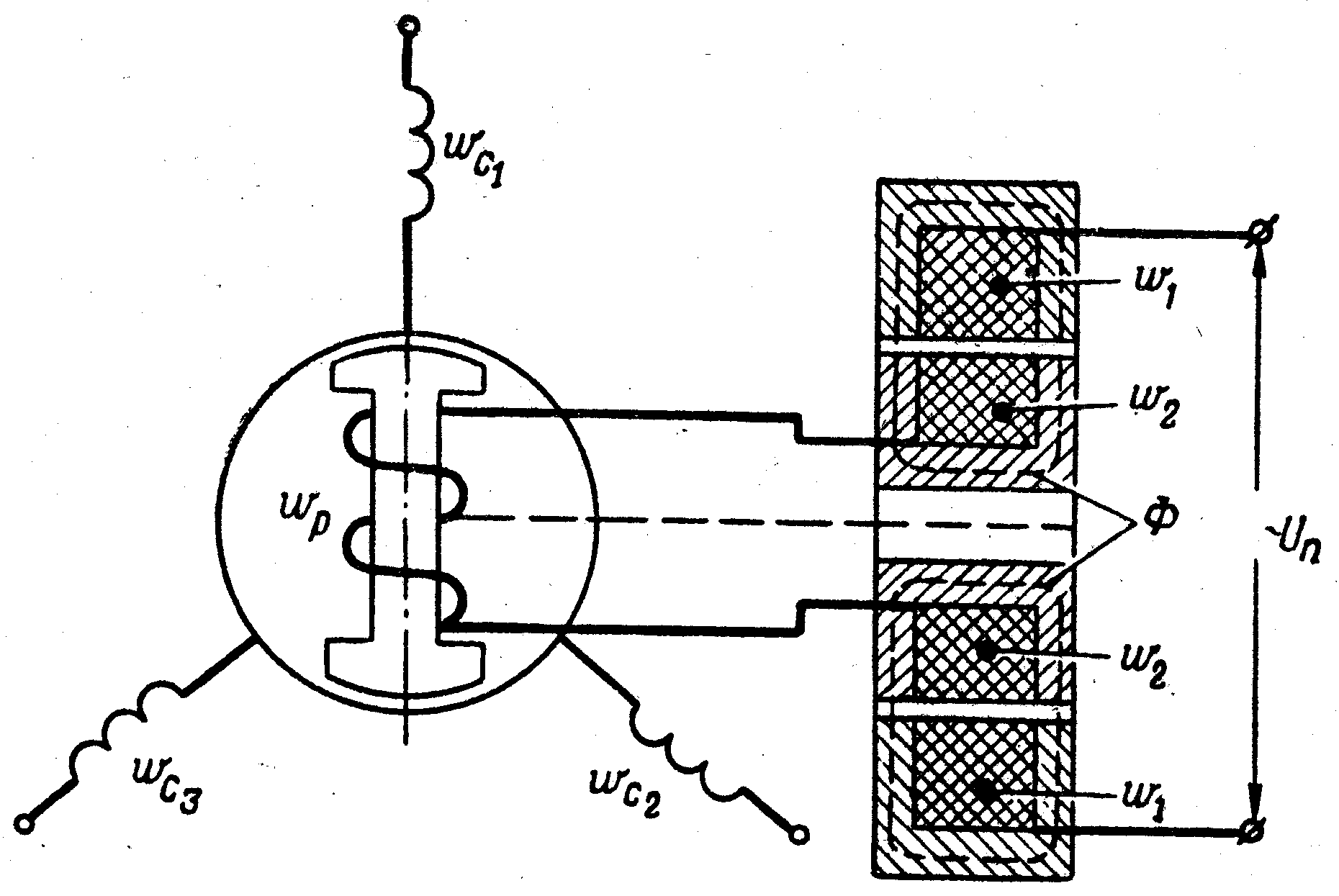
| Рис. 2.16. Принципиальная схема бесконтактного сельсина |
У контактных сельсинов, рассмотренных выше, основной причиной шумов (помех) является контактное устройство - щетка-кольцо. Диапазон частот этих шумов очень широк, так же как и у потенциометрических датчиков. Для устранения указанных шумов и повышения надежности работы сельсинов последнее время начинают применяться бесконтактные сельсины. Принципиальная схема одного из таких сельсинов показана на рис. 2.16, из которой видно, что контактное устройство щетка-кольцо обычного сельсина в данном случае заменено трансформатором специальной конструкции.
Первичная обмотка трансформатора с числом витков w 1расположена на статоре сельсина и, следовательно, при работе сельсинов остается неподвижной. Вторичная обмотка с числом витков w2 размещена на роторе сельсина и поворачивается вместе с ротором вокруг оси ротора. Напряжение питания сельсина U пподводится к первичной обмотке (w 1). Поток Ф, созданный этой обмоткой, замыкается так, как показано на рис. 2.16. При этом величина ЭДС, наводимая во вторичной обмотке (w2)трансформатора за счет потока Ф, не зависит от угла поворота ротора сельсина. Эта ЭДС используется для питания обмотки w р ротора сельсина. В остальном конструкция бесконтактного и контактного сельсинов подобны.
При одинаковых размерах и мощности контактных и бесконтактных сельсинов величина выходного напряжения U вых в бесконтактных сельсинах обычно меньше, чем в контактных, поэтому коэффициент усиления (чувствительность)  бесконтактных сельсинов несколько меньше, чем у контактных.
бесконтактных сельсинов несколько меньше, чем у контактных.
При изготовлении сельсинов возможна некоторая несимметрия, т. е. неточности в расположении осей катушек обмоток статора, небольшие искажения формы полюсных башмаков и другие факторы, которые обусловливают инструментальную погрешность сельсинного датчика, индивидуальную для каждой пары сельсинов.
Величину этой погрешности измеряют опытным путем, для чего, задавая дискретные значения угла поворота α ротора СД,находят каждый раз соответствующие значения угла поворота ротора СП,при котором напряжение на выходе датчика U вых0= 0. Рассогласования e= α - α ', имеющие место при этом, и составляют погрешность сельсинов. Величина погрешности e определяется через каждые 30° при повороте роторов сельсинов вправо и влево в пределах 180°.
Среднее значение инструментальной погрешности будет
 ,
,
где  ;
;  - максимальное значение ошибки при повороте роторов сельсинов соответственно вправо и влево.
- максимальное значение ошибки при повороте роторов сельсинов соответственно вправо и влево.
Исходя из величины средней инструментальной погрешности сельсины делятся на три класса точности, для которых средняя инструментальная погрешность составляет: для первого класса 0,5°, для второго - 0,5-1,0° и для третьего - 1,0-1,5°.
|
|
|
|
|
Дата добавления: 2014-11-08; Просмотров: 4433; Нарушение авторских прав?; Мы поможем в написании вашей работы!