КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Многофункциональные датчики
Индуктивные датчики в системе счета осей
Следующая группа датчиков характеризуется формированием информационных сигналов о движении оси вагона путем амплитудной модуляции выходного напряжения ДСО. К их числу относятся датчики индуктивного типа [16]. Чувствительным элементом датчика являются катушки индуктивности, параметры которых изменяются при движении колеса над ними. Катушки питаются переменным током. Выходной сигнал датчика — амплитуда напряжения.
ДСО с использованием амплитудной модуляции имеют тот же недостаток, что и датчик магнитного типа. Передаваемая ими информация искажается под действием электромагнитных помех, следовательно, не обеспечивается передача информации об осях на большие расстояния (сотни метров, километры).
Потребность в передаче информационного сообщения на эти расстояния вызвана активным внедрением на дорогах систем контроля занятости перегона на основе ДСО. При этих системах датчики устанавливаются на границах станции, а станционные блоки размещаются в помещениях.
Датчик представляет собой две катушки индуктивности, монтируемые по разным сторонам шейки рельса напротив друг друга. Катушки имеют длину 600 мм и подключаются специальным антивибрационным кабелем к блоку преобразования, размещенному в нескольких метрах от рельса. В блоке формируется напряжение питания катушек и выходное напряжение ДСО преобразуется в помехозащищенный сигнал.
При отсутствии колеса над датчиком выходное напряжение с катушек индуктивности преобразуется в две частотные последовательности импульсов. Выходы формирователей последовательностей согласуются с соединительными проводами питания "счетного пункта". В станционной части системы две частотные последовательности выделяются фильтрами.
От движения колеса над датчиком изменяется коэффициент взаимоиндукции и, в зависимости от направления движения, исчезает одна или другая частотная последовательность. Формирователи "счетного пункта" отключают частотные последовательности в процессе движения и при остановках. В станционных счетчиках осей определяется пропадание частотного сигнала, по которому устанавливается направление движения и выполняется счет осей.
Многофункциональный датчик (МФД) с частотно-модулированным выходным сигналом разработан и эксплуатируется на Октябрьской железной дороге. На основе МФД и специального электронного блока преобразования сигнала (конвертера) изготовлены комплекты аппаратуры для системы ДИСК-Б, информационная система контроля занятости перегона, комплект аппаратуры для счета вагонов в отцепах.
Датчик имеет небольшие габариты (210х80х30), массу 700 г и содержит 14 транзисторов. Датчик работоспособен в широком температурном диапазоне (- 50… +650С), виброустойчив и герметичен, устанавливается внутри колеи между шпал. Широкая поверхность датчика ориентирована к зоне движения гребня посредством крепежного устройства массой 1,5 кг. Небольшая потребляемая мощность (2 Вт) и выходные токовые импульсы свыше 50 мА допускают установку датчика на расстоянии до 5 км от системы автоматики. Для подключения датчика к системе достаточно двух кабельных жил. По этим жилам подается питание и передается информационный сигнал. Для установки датчика требуется несколько минут и в ходе эксплуатации практически не обслуживается.
Для модуляции сигнала используются два электронных генератора. Небольшие катушки индуктивности генераторов расположены вдоль широкой поверхности датчика вблизи зоны движения гребня и разнесены друг от друга на расстояние в несколько сантиметров. Движущийся над поверхностью датчика гребень изменяет частоты генераторов и вызывает изменение выходной частоты прямоугольных импульсов датчика. Схемное решение датчика выполнено так, что совместно с частотной модуляцией происходит модуляция длительности выходного импульса. Это дополнительно повышает помехозащиту и информативность МФД. В результате многолетней эксплуатации датчиков было установлено, что для колес вагонов средняя градуировочная характеристика имеет вид, показанный на рис..21. Использование зависимости выходной частоты от положения оси колеса над датчиком расширяет информационные свойства датчика, так как в процессе движения оценивается их взаимное положение. Рассмотрим наиболее простой критерий определения прохода оси над датчиком. Считаем, что ось прошла, если частота изменялась относительно начального значения Fo как в большую, так и в меньшую сторону.
Например, при движении колеса в сторону увеличения координаты L происходит последовательное изменение частоты от Fo до значения F+, затем снова снижается до значения Fo (центр оси совпадает с центром датчика по вертикали) и, наконец, после уменьшения частоты до F- вновь увеличивается до значения Fo. При движении колеса в другом направлении изменение частоты происходит в обратном порядке. Остановка колеса над датчиком определяется как длительное получение частоты одного значения, например, Fост.
Рисунок 21. Градуировочная характеристика многофункционального датчика с
частотно- модулированным выходным сигналом
Частотно-модулированный сигнал может обрабатываться средствами вычислительной техники, так как достаточно просто преобразуется в код. Однако существование большого количества систем, воспринимающих сигнал о движении оси в виде импульса напряжения, потребовало для согласования с ними соответствующего преобразования.
Преобразование частотного сигнала МФД в импульс напряжения происходит в конвертере, функциональная схема которого приведена на рис. 22. Кроме предоставления информации об осях, в конвертере предусмотрены другие информационные выходы, которые допускают использование МФД в существующих и разрабатываемых системах. МФД запитывается от источника питания линии (ИПЛ) через измерительный резистор Rи и двухпроводную соединительную линию. На измерительном резисторе выделяется напряжение, определяемое током потребления МФД и его выходными прямоугольными токовыми импульсами. Источник питания конвертера (ИПК) формирует напряжение питания для остальных элементов. После прохождения импульсов через интегрирующую цепь (ИЦ) прямоугольная последовательность преобразуется в пилообразную. Это позволяет настроить компаратор (К) на оптимальный прием и через гальваническую развязку (ГР1) формировать импульсы на входе порта Р1.1 микропроцессорного контроллера (МК). МК обрабатывает мгновенные значения частотного сигнала МФД за время, равное периоду следования входных импульсов порта Р1.1.
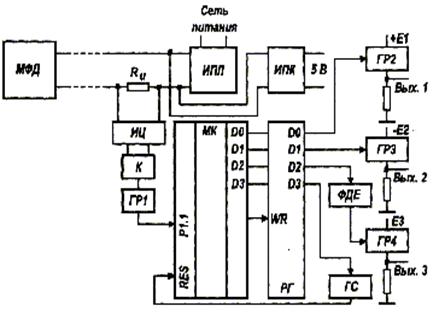
Рисунок 22. Схема преобразования частотного сигнала МФД
Алгоритм обработка сигналов МФД включает в себя измерение текущих значений периода и длительности импульсов, сравнение их с исходными значениями и установление факта изменения (неизменности) частоты. Каждый период в МК принимается решение о движении оси, для чего сравниваются результаты обработки периода и длительности импульсов. Окончательное решение принимается по результатам сравнений за несколько периодов. Такой способ эквивалентен обработке сигналов датчика по нескольким каналам и создает информационно надежную систему. Во время движения колеса над датчиком в МК отслеживаются изменения выходной частоты датчика на соответствие градуировочной характеристики и определяется время движения гребня через зону чувствительности МФД. После установления факта прохода колеса формируется импульс напряжения оси, например, через разряд DO регистра РГ.
Выходные информационные сигналы конвертера передаются в систему через гальванические развязки ГР2—ГР4, выполненные на оптоэлектронных парах типа АОТ123. Выходной фототранзистор оптопары управляется записью соответствующего бита в выходные разряды регистра РГ.
Длительность импульса оси устанавливается программно. Для системы ДИСК-Б нужен биполярный импульс длительностью, равной времени движения гребня над датчиком. Формирование импульса другой полярности на "Вых. 2". обеспечивается источником питания Е2 с полярностью, противоположной Е1. После окончания импульса с "Вых. 1" (в разряд DO установлен логический 0) в разряд D1 контроллер записывает логическую 1, формируя импульс противоположной полярности на "Вых. 2". Длительность этого импульса также равна времени движения колеса над датчиком. Для системы ДИСК-Б оба выхода объединяются.
В системах ГАЦ, учитывающих направление движения, второй выход используется для указания направления движения. На этом выходе импульс напряжения формируется синхронно с импульсом оси только в случае движения в определенном направлении, например, с горки.
Третий выход "Вых. 3" конвертера предназначен для диагностики работоспособного состояния МФД и конвертера со стороны системы. Вид сигнала диагностики определяется конкретной системой. Представление работоспособного состояния в виде логической 1 определено требованием использования МФД в системах, обеспечивающих безопасность движения.
После подачи напряжения питания и выхода МК на рабочие алгоритмы в разряде D2 инвертируется бит синхронно с поступлением импульсов датчика. Формирователь динамической единицы (ФДЕ) при поступлении импульсов с разряда D2 регистра зажигает диод гальванической развязки ГР4, устанавливая логическую 1 на "Вых. З". Прекращение появления импульсов на выходе D2 приводит к установке логического 0 на "Вых. З", свидетельствуя о нарушении работы конвертера или датчика.
Аппаратно-программные средства конвертера выявляют основные отказы и информируют об этом систему. Нарушение функционирования МФД может выражаться в изменении тока потребления или в существенном отличии частот от значений, определенных градуировочной характеристикой. Настройка компаратора и выбор определенных параметров интегрирующей цепи выявляет отказы, выраженные через изменения тока потребления датчика. Определение этого отказа, как и выявление отказа от существенного изменения частоты, происходит в микропроцессорном контроллере на программном уровне, позволяя МК снимать посылку импульсов в разряд D2. Отказы в ИПЛ, ИПК, обрывы соединительной линии и выход из строя компаратора также вызывают появление сигнала о неработоспособном состоянии [20].
Позиционный отказ (например, из-за несанкционированного съема МФД с рельса) обнаруживается в МК через изменения тока потребления или частоты. Для этого разработаны крепежные устройства МФД, обеспечивающие изменение одного из этих параметров при его демонтаже. Введение сигнала с ФДЕ в цепь "Вых. 3" позволяет системе получать сведения об отказах в работе МК при "зависании" программ или выходе контроллера из строя (в этом случае прекращается изменение значения бита в разряде D2). Исключению "зависаний" способствует генератор сброса ГС, формирующий импульс сброса при "сбоях" программы МК.
Основные элементы конвертера расположены на плате размерами 100х80 мм. Стабилизаторы источников питания выносятся на отдельную металлическую пластину. В качестве МК используется микросхема АТ89с51, позволяющая выполнять обработку сигналов МФД при максимальных скоростях движения 50—70 м/с.
На основе МФД и конвертеров изготовлены, всесторонне испытаны и введены в эксплуатацию комплекты аппаратуры для систем ДИСК-Б, информационная система контроля занятости перегона, комплект аппаратуры для счета вагонов в отцепах.
|
|
Дата добавления: 2014-12-16; Просмотров: 1075; Нарушение авторских прав?; Мы поможем в написании вашей работы!