КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные понятия. Системы управления современными технологическими процессами характеризуются большим количеством технологических параметров
|
|
|
|
Системы управления современными технологическими процессами характеризуются большим количеством технологических параметров, число которых может достигать нескольких тысяч. Для поддержания требуемого режима работы, а в конечном итоге – качества выпускаемой продукции, все эти величины необходимо поддерживать постоянными или изменять по определенному закону.
Физические величины, определяющие ход технологического процесса, называются параметрами технологического процесса (температура, давление, расход, напряжение и т.д.). Параметр технологического процесса, который необходимо поддерживать постоянным или изменять по определенному закону, называется регулируемой величиной или регулируемым параметром. Значение регулируемой величины в рассматриваемый момент времени называется мгновенным значением. Значение регулируемой величины, полученное в рассматриваемый момент времени на основании данных некоторого измерительного прибора называется ее измеренным значением.
Согласно общепринятому определению, исполнительный механизм (сервопривод) это устройство, предназначенное для перемещения регулирующего органа в системах автоматического регулирования или дистанционного управления, а также в качестве вспомогательного привода элементов следящих систем, рулевых устройств транспортных машин и т. п. Изменение положения регулирующего органа (РО) вызывает изменение потока энергии или материала, поступающих на объект, и тем самым воздействует на рабочие органы машины, механизмы и технологические процессы, устраняя отклонения регулируемой величины от заданного значения. Исполнительный механизм не только изменяет состояние управляемого объекта, но и перемещает РО в соответствии с заданным законом регулирования при минимально возможных отклонениях. В большинстве случаев исполнительный механизм действуют от посторонних источников энергии, так как непосредственное управление исполнительным механизмом от первичных элементов регулирования (реле, датчиков и др.) невозможно вследствие их малой мощности, недостаточной для воздействия на регулирующий орган. Исполнительный механизм обычно состоит из двигателя, передачи и элементов управления, а также элементов обратной связи, сигнализации, блокировки, выключения.
|
|
|
Создание надежных и быстродействующих бесконтактных электрических аппаратов с высокими технико-экономическими показателями стало возможным благодаря прогрессу в области производства высококачественных магнитных материалов и полупроводниковых приборов. Развитие элементной базы, широкое применение микропроцессоров и других средств управляющей техники привело к созданию и разработке бесконтактных электрических аппаратов, обеспечивающих согласование микросредств управляющей техники и исполнительных механизмов. Это интегральные микросхемы, электрические аппараты на оптоэлектронных полупроводниковых приборах и на силовых транзисторных ключах. Широкое применение в системах управления индустриальными объектами находят бесконтактные реле на интегральных микросхемах (в частности на операционных усилителях), высокопомехоустойчивые логические элементы на интегральных микросхемах.
Модель процесса управления. Физические величины, характеризующие состояние объекта управления называются выходными переменными объекта. Их совокупность определяют как вектор выходных состояний объекта управления. Этот вектор должен удовлетворять определенным требованиям, предъявляемым как установившимся, так и динамическим режимам работы технического устройства. Совокупность предписаний, определяющих характер изменения вектора входных состояний объекта управления, называется алгоритмом его функционирования. Несмотря на многообразие технических устройств можно выделить 3 базовых алгоритма их функционирования. К ним относятся:
|
|
|
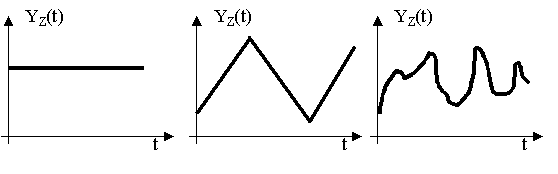
1. Алгоритм стабилизации, требующий постоянства вектора выходного состояния ОУ Y (t) и равенство его заданному значению YZ:
YZ =const.
При этом заданное значение должно оставаться постоянным в течение достаточно долгого периода времени.
2. Программный алгоритм, для которого характерно изменение вектора выходного состояния ОУ по наперед известному закону или программе. В этом случае заданное значение вектора выходного состояния является известной функцией времени, то есть
YZ (t)= F Z(t).
3. Следящий алгоритм работы ОУ, характеризующийся тем, что требуемый закон изменения вектора выходного состояния объекта неизвестен. Следящий алгоритм может быть описан выражением:
Yz (t)= F 0(t),
где F 0(t) – неопределенная функция времени.
Графическое представление алгоритмов функционирования для вектора выходного состояния, содержащего только одну компоненту, представлено на рис. 6.1.
| ||
| Стабилизация | Программный | Следящий |
| Рис. 6.1. Алгоритмы функционирования ОУ |
Для формирования требуемого алгоритма работы ОУ на него подается одно или несколько управляющих воздействий. Эти управляющие воздействия, скомпонованные в виде матрицы столбца, называются вектором управляющих воздействий. Взаимосвязь этих величин определяется как переходная характеристика ОУ b(t):
 .
.
В случае многомерных ОУ переходная характеристика представляется в виде матрицы.
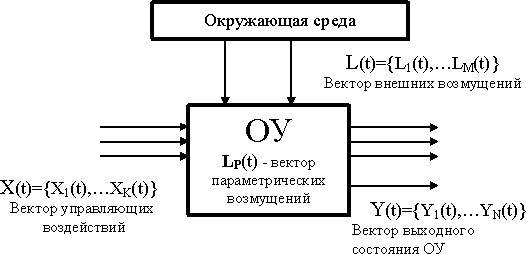
На практике вектор выходных состояний в процессе работы ОУ отклоняется от требуемого значения. Это вызывается взаимодействием объекта со средой его обитания и изменением параметров самого объекта управления. Взаимодействие ОУ с внешней средой характеризуется различного рода возмущающими факторами. Их совокупность называется вектором возмущающих воздействий на объект управления или внешним вектором возмущений.
Вторым важным фактором, влияющим на изменение вектора выходного состояния ОУ, является изменение параметров самого объекта в процессе его работы. Такие воздействия называют параметрическими, а их совокупность можно представить в виде вектора параметрических возмущений LP (t). На рис. 6.2 показано взаимодействие объекта управления с окружающей средой.
|
|
|
|
| Рис. 6.2. Условия работы ОУ |
Еще одной причиной отклонения вектора выходного состояния от требуемого значения является инерционность ОУ, проявляющаяся при изменении вектора управляющих воздействий на объект. Очевидно, что для изменения вектора выходного состояния ОУ необходимо изменение вектора управляющих воздействий на этот объект. То есть имеет место следующая последовательность действий:
YZ (t)Þ X (t)Þ Y (t).
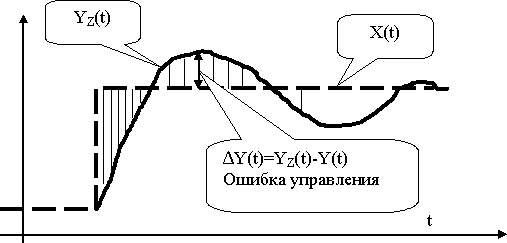
Для любого инерционного ОУ оказывается невозможным мгновенное изменение выходной переменной вслед за управляющим воздействием. При изменении управляющего воздействия на объект, обладающий некоторой инерционностью, возникает переходный процесс. В течение этого процесса вектор выходного состояния ОУ не будет соответствовать требуемому значению. Характер переходного процесса определяется динамическими свойствами ОУ и закона изменения управляющего воздействия. Один из возможных видов переходного процесса для инерционного ОУ показан на рис. 6.3.
Действие любого возмущающего фактора на объект управления приводит к отклонению значения вектора выходного состояния ОУ от требуемого значения. То есть имеет место соотношение:
D Y (t)= YZ (t) – Y (t).
Такое отклонение называется ошибкой управления объекта управления. Задачей теории автоматического управления является определение алгоритма управления, который обеспечивает минимальное или не превышающее необходимого отклонения вектора выходного состояния ОУ от требуемого значения.
| |
| Рис. 6.3. Переходный процесс в ОУ |
Принцип действия системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса, от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения.
|
|
|
Под управлением понимают процесс организации такого целенаправленного воздействия на объект управления, в результате действия которого последний переходит в требуемое состояние (по академику А. И. Бергу). Для решения этой задачи используются разнообразные управляющие устройства или регуляторы. Управляющим устройством называется устройство, обеспечивающее формирование управляющего воздействия на объект управления, соответствующего алгоритму его работы. Устройство, выполняющее эти функции без непосредственного участия человека, называется автоматическим управляющим устройством или регулятором.
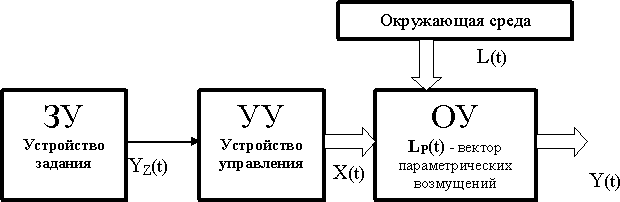
Совокупность объекта управления и управляющего устройства, взаимодействие которых приводит к поставленной цели, называется системой автоматического управления (рис. 6.4). Система включает в себя, кроме ОУ и устройства управления, задающее устройство, которое формирует необходимый закон изменения требуемых значений вектора выходного состояния объекта управления. Регулирование состоит в достижении такой деятельности системы, при которой выравниваются все отклонения на выходе системы от заданного значения этого состояния. Заданное значение технического параметра может быть постоянным или переменным. В первом случае говорят о прямом регулировании, совмещенном с управлением. Во втором случае регулирование заключается в корректировке отклонений вектора выходных состояний системы от нормы каждого компонента этого вектора.
|
| Рис. 6.4. Функциональная схема САУ |
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 1656; Нарушение авторских прав?; Мы поможем в написании вашей работы!