КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принципы управления
|
|
|
|
Классификация систем автоматического управления и ее элементов
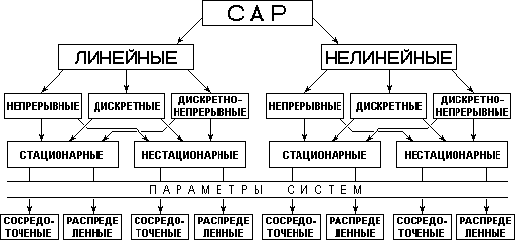
Существует большое разнообразие систем автоматического управления. Чтобы как-то разобраться в этом многообразии проводится классификация систем автоматического управления (САУ). Существует несколько признаков, по которым проводится классификация САУ. На рис. 6.5 приведена примерная классификация САУ. Основные признаки классификации САУ:
|
| Рис. 6.5. Классификация САУ |
1. По назначению, то есть характеру изменения задающего воздействия, различают:
– системы автоматической стабилизации;
– системы программного управления;
– следящие системы.
2. По принципу управления различают:
– системы с управлением по разомкнутому циклу;
– системы с управлением по замкнутому циклу;
– системы комбинированного управления.
3. По характеру сигналовуправления различают САУ:
– непрерывные (аналоговые);
– дискретные САУ, из которых выделяют:
o импульсные;
o релейные;
o цифровые.
4. По характеру используемой информации об условиях работы различают САУ:
– с жестким законом управления и структурой;
– с изменяемыми структурой и законом управления, к которым относятся системы:
o автоматической настройки;
o самообучающие;
o самоорганизующие.
5. По характеру математических соотношений различают САУ:
– линейные, для которых применим принцип суперпозиции;
– нелинейные, для которых принцип суперпозиции в общем случае не справедлив.
Как линейные, так и нелинейные САУ могут подразделяться на аналоговые, дискретные и дискретно-непрерывные, стационарные и нестационарные. При этом стационарной системой называется САУ, параметры элементов которой не зависят от времени работы системы. Для нестационарной САУ это условие не выполняется.
|
|
|
Стационарные и нестационарные САУ могут быть с сосредоточенными и распределенными параметрами.
6. По количеству выходных координат объекта управления различают САУ:
– одномерные;
– многомерные.
Последние делятся на системы связанного и несвязанного управления. В системах связанного управления отдельные управляющие устройства соединены между собой внешними связями. Входящая в состав многомерной системы отдельная САУ, называется автономной, если управляемая ею выходная переменная не зависит от значения остальных управляемых величин.
Классификация исполнительных устройств. Исполнительным устройством (ИУ) называется устройство в системе управления, непосредственно реализующее управляющее воздействие со стороны регулятора на объект управления путем преобразования электрической энергии для воздействия на управляющий процесс через механическое перемещение (или поворот) регулирующего органа (РО) объекта управления.
Типы ИУ:
– плунжерные – расход регулируется путем изменения площади проходного сечения, образованного парой «седло-затвор». Форма затвора подбирается таким образом, чтобы пропускная характеристика F = F (h) была линейна (h – положение штока);
– шланговые – расход регулируется сжиманием гибкого шланга (тип ПШУ-1);
– диафрагмовые – используют гибкие мембраны;
– заслоночные – используют заслонки в виде дисков, вращающихся в сечении трубопровода;
– краны – используют затворы, выполненные в виде цилиндра, усеченного конуса или сферы с проходным отверстием; расход регулируется поворотом затвора на определенный угол;
– задвижки – расход регулируется плоской задвижкой, перемещающейся перпендикулярно оси трубопровода.
Исполнительные устройства обычно лишь опосредовано влияют на переменные управляющего процесса. Например, исполнительные устройства управляют подводом тепла, движением или потоками исходных реагентов, и уже от динамики физической системы зависит, как измеряемые величины изменятся из-за управляющих воздействий исполнительных устройств.
|
|
|
В составе исполнительного устройства можно выделить 2 части:
– усилитель – преобразователь, предназначенный для согласования устройства вывода системы управления с исполнительным механизмом;
– исполнительный механизм.
Исполнительный механизм. Стандартные исполнительные механизмы (ИМ) работают в комплекте с реагирующим органом, образуя вместе ИУ, и классифицируются:
– по виду энергии, определяющей тип привода, создающей перестановочное усилие, различают гидравлический, пневматический, электрический и комбинированный исполнительный механизм (напр., электрогидравлический);
– виду движения (прямоходовые, однооборотные и многооборотные);
– принципу создания перестановочного усилия (мембранные, поршневые, сильфонные, лопастные, электромагнитные, электродвигательные и др.).
В общем случае исполнительный механизм состоит из двигателя, передачи и элементов сигнализации, контроля, блокировки и выключателя. Исполнительные механизмы могут предназначаться для привода: элементов, регулирующих потоки энергии, жидкости, газа, сыпучих или перемещаемых устройств (реостатов, клапанов, задвижек и заслонок, направляющих аппаратов вентиляторов, железнодорожных стрелок и т. д.); элементов следящих систем; особых элементов систем управления (противовесов в грузоподъемных сооружениях, зажимных автоматических устройств и т. д.).
Исполнительный механизм осуществляет поступательное движение, поворот в пределах менее одного оборота (кривошипный исполнительный механизм), на один поворот, на несколько оборотов.
Пневматические ИМ нашли широкое распространение благодаря простоте конструкции, низкой стоимости, надежности, способности работать в пожаро- и взрывоопасных условиях. Пневматические и гидравлические двигатели исполнительного механизма могут быть поршневые, мембранные, сильфонные и лопастные (с вращательными движениями) и представляют собой клапан, задвижку или затвор, перемещаемые гидравлическим, пневматическим или электрическим приводом. Гидравлические исполнительные механизмы работают при давлении до 3 Мн/м2 (30 кГ/см2), пневматические до 0,6 Мн/м2 (6 кГ/см2). Недостатки: ограниченность расстояния от регулятора до места установки ИУ (обычно до 200 м), низкое быстродействие, низкий класс точности.
|
|
|
Входным сигналом этих ИМ является давление сжатого воздуха, которое, воздействуя на мембрану, создает усилие
F = S эф (Рu – Р 0),
где Pu – управляющее давление; Р 0 – начальное давление, при котором создается движение плунжера; S эф – эффективная площадь мембраны.
Электрические ИМ имеют преимущества: высокое быстродействие, точность позиционирования, компактность, доступность источника энергии, большие перестановочные усилия. Недостатки: дороговизна, необходимость мер защиты во взрыво- и пожароопасных условиях. Электрические ИМ подразделяются на электродвигательные (привод от асинхронного двигателя) и электромагнитные (привод на соленоиде), применение которых ограничено из-за резких (рывком) воздействий на управляемый орган. Большинство электрических исполнительных механизмов имеют мощность электродвигателей от 10 Вт до одного, а в отдельных случаях до нескольких кВт. Промышленность выпускает практически только электродвигательные ИМ с напряжением 220 или 380 В:
- многооборотные (МЭМ);
- однооборотные (МЭО) с углом поворота до 360°;
- прямоходовые (МЭП).
Некоторые управляющие элементы могут представлять собой самостоятельную систему управления (регуляторы различного типа: пропорционально – интегральные, пропорционально – интегрально-дифференциальные). Требования к исполнительным механизмам, т.е. потребляемая мощность, разрешающая способность, повторяемость результата, рабочий диапазон и т.д., могут существенно различаться в зависимости от конкретного приложения, поэтому для успешного управления любым процессом важно правильно выбрать исполнительные устройства.
В процессе работы объект управления подвержен воздействию различных внешних возмущений, вследствие чего управляемая величина отклоняется от требуемого значения. Задачей устройства управления является обеспечение соответствия управляемой величины заданному значению путем передачи на объект управления необходимого управляющего воздействия.
|
|
|
По способу определения управляющего воздействия, необходимого для компенсации отклонения управляемой величины от требуемого значения, различают 3 принципа управления:
· управление по возмущению;
· управление по отклонению;
· комбинированное управление.
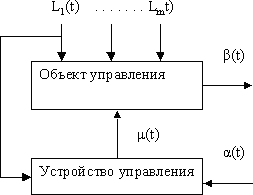
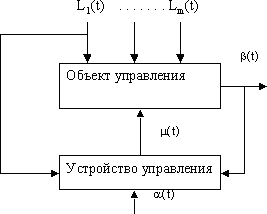
Принцип управления по возмущению. Управление по возмущению основано на принципе компенсации возмущений. При этом управляемый параметр не изменяется, а используется только информация о внешнем воздействии f (t); определяют основное возмущающее воздействие и устанавливают, как необходимо изменять управляющее воздействие на объект управления, чтобы значение управляемых параметров поддерживать неизменным. Функциональная схема такой САУ представлена на рис. 6.6.
|
| Рис. 6.6. Структура САУ, построенной на базе принципа управления по возмущению |
В САУ, использующей принцип управления по возмущению, управляющее воздействие на объект определяется как
m(t)= F (a(t), L (t)).
|
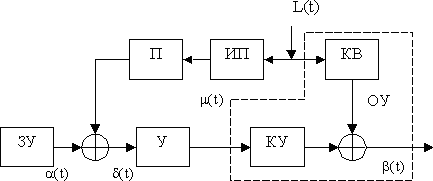
| Рис. 6.7. Структурная схема САУ |
Принцип управления по возмущению заключается в том, что для устранения отклонения вектора выходных параметров от требуемого значения, вызываемого возмущающим воздействием, измеренная величина возмущения преобразуется в управляющее воздействие, которое приложено к ОУ, вызывает компенсирующее отклонение управляемой величины противоположного знака по сравнению с отклонением, вызываемым возмущающим воздействием. В САУ, использующую принцип управления по возмущению, структурная схема которой приведена на рис. 6.7, входят следующие элементы:
· задающее устройство (ЗУ), необходимое для реализации алгоритма работы объекта управления, выражающегося в формировании управляющего воздействия a(t);
· измерительный преобразователь (ИП), обеспечивающий измерение выбранного возмущения на объект управления;
· промежуточный усилитель (У), обеспечивающий формирование требуемого закона управления ОУ;
· объект управления (ОУ).
Использование принципа управления по возмущению обеспечивает компенсацию влияния только измеряемых внешних возмущений.
Преимущества такого способа управления:
· возможность полной компенсации возмущающего воздействия на объект управления;
· отсутствие информации о подлинном состоянии объекта управления устраняет проблему обеспечения устойчивости управления.
Недостатки:
· устранение влияния лишь тех возмущающих воздействий, для которых созданы компенсационные каналы обработки величин этих воздействий;
· наличие большого числа неконтролируемых возмущений увеличивает погрешность стабилизации выходной координаты;
· изменение условий компенсации влияния внешних возмущений на объект при изменении его параметров, возникающих при изменении условий работы объекта управления и регулятора;
· возможность применения управления только к объектам, качественные и количественные характеристики которых известны.
Одним из способов реализации принципа управления по возмущению является принцип управления по управляющему воздействию (управлению). Ведь если рассмотреть объект управления, то как управляющее, так и возмущающее воздействия являются внешними по отношению к самому объекту управления.
|
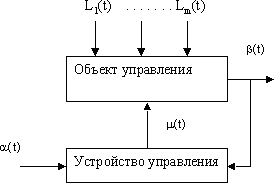
| Рис. 6.8. Функциональная схема САУ, построенной на базе принципа управления по отклонению |
Принцип управления по отклонению. Более высокое качество управления позволяют получить замкнутые САУ, в которых используется информация об измеряемом управляемом параметре (рис. 6.8). Устройство управления производит сравнение полученного сигнала с заданным значением и при наличии разности вырабатывается управляющее воздействие по уменьшению величины рассогласования заданного и измеренного значений параметров. При этом устройство управления стремится компенсировать это отклонение независимо от причин, его вызывающих. Данный принцип управления САУ, иногда называют компенсационным принципом Ползунова-Уатта. В САУ по отклонению управляющее воздействие на объект определяется как
m(t)= F (a(t), b(t)).

|
| Рис. 6.9. Структурная схема САУ, построенной на базе принципа управления по отклонению |
В САУ по отклонению, структурная схема которой представлена на рис. 6.9, входят следующие элементы:
· задающее устройство (ЗУ), необходимое для реализации алгоритма формирования управляющего воздействия a(t);
· измерительный преобразователь (ИП), обеспечивающий измерение управляемой координаты;
· элемент сравнения (ЭС), выявляющий отклонение d(t) управляемой координаты b(t) от ее требуемого значения;
· промежуточный усилитель (У), обеспечивающий формирование требуемого закона управления ОУ;
· объект управления (ОУ).
Принцип работы САУ заключается в измерении управляемой координаты b(t) с помощью ИП и сравнении полученного сигнала с задающим a(t). Элемент сравнения выявляет разность этих сигналов, представляющую ошибку управления. Этот сигнал используется для формирования управляющего воздействия на ОУ m(t). Очевидно, что выходная координата является функцией как задающего сигнала a(t), так и своего собственного значения. То есть
b(t)= F (a(t), b(t)).
Первая составляющая выходного сигнала формируется по прямому каналу управления, а вторая – по каналу с обратным направлением передачи информации, называемому каналом обратной связи или просто обратной связью. Так как такая связь обеспечивается элементом сравнения, вычисляющим разность сигналов задания и обратной связи, то данный вид обратной связи является отрицательным. Если сигнал обратной связи определяется алгебраическим суммированием сигналов задания и обратной связи, то такая связь называется положительной. Поэтому такой принцип управления называется управлением с обратной связью. Так как в такой САУ присутствует замкнутый контур для прохождения информации, то такие системы называют замкнутыми САУ. Замкнутой САУ называют систему, в которой процесс управления ОУ зависит от результата управления. Системы, которые не используют конечные результаты управления объектом, называют разомкнутыми. Следовательно, САУ, построенные с использованием принципа управления по возмущению, являются разомкнутыми.
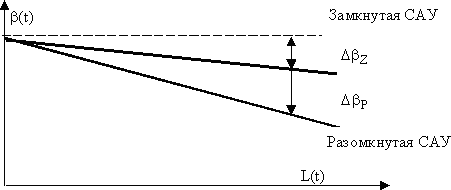
Особенность замкнутых САУ сводится к тому, что при достаточно большом коэффициенте передачи замкнутого контура управления KS>>1 ошибка управления в замкнутой системе будет много меньше, чем в разомкнутой. То есть
Db Z <<Db P.
| |||
| Рис. 6.10. Статические характеристики с САУ с обратной связью |
| b(t) |
KS>  .
.
Суммарная ошибка управления в замкнутой САУ равна:
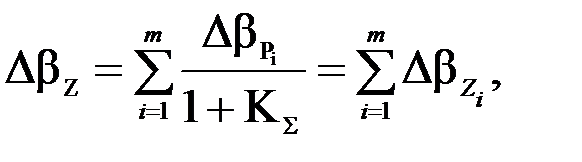
и при воздействии на объект нескольких возмущающих факторов, свойства уменьшения ошибки управления сохраняются.
Преимущества такого способа управления:
· большая гибкость и приспособляемость к различным условиям эксплуатации САУ;
· возможность уменьшения влияния любых внешних возмущений на объект управления;
· малая чувствительность к изменению параметров регулятора и объекта управления.
Недостатки:
· невозможность полного устранения влияния возмущающих воздействий на вектор выходных состояний объекта управления;
· возникновение проблем с устойчивостью САУ при попытках увеличения коэффициента усиления системы.
Комбинированный принцип управления. Совместное использование принципов управления по возмущению и отклонению называется принципом комбинированного управления. Принцип управления по отклонению реализуется с помощью обратной связи, а принцип управления по возмущению – с помощью компенсирующих связей, поэтому структура такой системы имеет вид, приведенный на рис. 6.11, а управляющее воздействие на ОУ определяется как
|
| Рис. 6.11. Структура САУ, построенной на базе комбинированного принципа управления |
m(t)= F (a(t), b(t), L (t)).
Преимущества такого способа управления:
· полная компенсация ошибок управления, вызываемых основными возмущающими факторами;
· уменьшение ошибок управления, вызываемых неизмеряемыми возмущающими факторами;
· меньшая чувствительность к изменению параметров по сравнению с разомкнутыми САУ;
· менее жесткие требования на величину коэффициента передачи замкнутой САУ, что снижает проблему обеспечения устойчивости системы.
Недостатки:
· конструктивная сложность САУ и сложность ее настройки, связанная с наличием большого числа каналов управления.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 1721; Нарушение авторских прав?; Мы поможем в написании вашей работы!