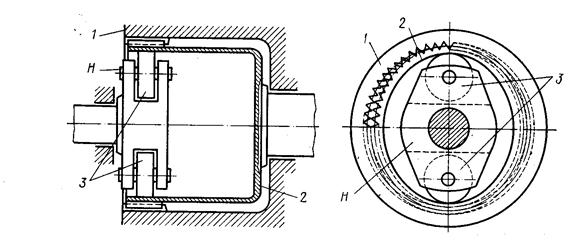
Волновая передача (рис. 15.5) состоит из жесткого зубчатого колеса 1, гибкого зубчатого колеса 2 и генератора волн Н, состоящего из водила с двумя свободно вращающимися роликами 3. Гибкое колесо представляет собой тонкостенный цилиндр с зубьями. Внешний диаметр генератора Н больше внутреннего диаметра гибкого колеса. При сборке гибкое колесо под действием генератора волн принимает в торцовом сечении криволинейную форму. В растянутой части гибкого колеса происходит зацепление между зубьями гибкого и жесткого колес. При вращении генератора Н гибкое колесо деформируется в виде волн, бегущих по окружности. Оба колеса имеют разное число зубьев. Поэтому при их последовательном зацеплении происходит относительное вращение колес. За полный оборот генератора подвижное колесо поворачивается относительно неподвижного на угол, соответствующий разности чисел зубьев z1 – z2.
Рис. 15.5
Генераторы волн бывают с разным числом роликов, кулачковые, электромагнитные; они могут располагаться внутри гибкого колеса и снаружи.
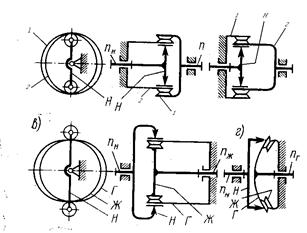
Существует много схем волновых передач (рис. 15.6). На рис. 15.6, а показана схема с неподвижным гибким колесом 2 и вращающимся жестким колесом 1. Частота вращения генератора Н обозначается nН, частота вращения колеса – n1. Генератор изображается со стрелками, показывающими направление сил, деформирующих звено. Волновые передачи кинематически представляют собой разновидность планетарных передач. Для их кинематического исследования можно применить метод обращения движения. Передаточное отношение рассматриваемой на рис. 15.6, а передачи
iН1 = nН /n1 = z1 /(z1–z2). (15.12)
На рис. 15.6, б показана схема с неподвижным жестким звеном (рис. 15.5). Передаточное отношение такой волновой передачи
iН2 = nН / n2 = –z2 /(z1 – z2). (15.13)
Знак минус в выражении (15.13) показывает, что гибкое звено и генератор волн вращаются в разные стороны. Разность чисел зубьев (z1 – z2) принимают кратной числу волн j, т.е. кратной двум для двухволновых передач и трем – для трехволновых. Обычно при заданном передаточном отношении i число зубьев гибкого колеса (рис. 15.6, а, б) принимают z2 = i j, а число зубьев жесткого колеса z1 = z2 + (z1 – z2) = z2 + j.
Н
1
в
г
а
б
1
2
2
2
1
Рис. 15.6
Схема волновой передачи, в которой ролики генератора нажимают на внешнюю поверхность цилиндра неподвижного гибкого звена(при подвижном жестком колесе Ж), показана на рис. 15.6, в. На рис. 15.6, г изображена схема с плоским гибким колесом Г, имеющим зубья на торцовой поверхности; жесткое колесо Ж неподвижное и имеет зубья на конической поверхности.
Высокая податливость гибкого колеса возможна при малой толщине его стенки. Поэтому используются мелкомодульные зубья с m = 0,2 … 0,8 мм. Число зубьев для гибкого колеса принимают 100 … 600. При z2 менее 100 необходимо увеличение модуля зацепления, что ведет к росту радиальной деформации и напряжений изгиба. При z2 больше 600 модуль зацепления уменьшается, что ведет к проскальзыванию зубьев под нагрузкой. В силовых передачах гибкие колеса изготавливают из качественных среднеуглеродистых сталей (40Х, 30ХГС, ШХ15) с последующей термообработкой, а в кинематических передачах – из пластмасс.
В зацеплении одновременно участвует до 40% от общего числа зубьев, благодаря чему достигается значительная разгрузка мелкомодульных зубьев.
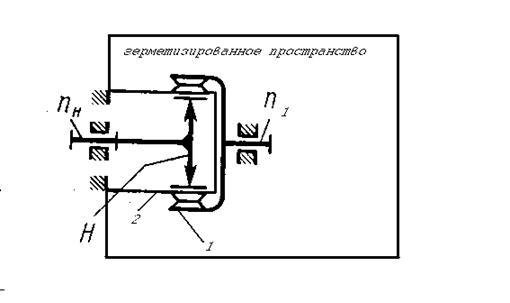
Волновые зубчатые механизмы имеют ряд достоинств: большие передаточные отношения (50 … 250 в одноступенчатой передаче) при малых габаритах и массе; высокие точность и плавность вследствие уменьшения общей ошибки при большом числе зацепляющихся зубьев и минимальный мертвый ход; высокий КПД (0,7 … 0,9) благодаря малым скоростям скольжения в зацеплении; возможность передачи вращательного движения в герметически закрытое пространство или через непроницаемую перегородку (см. рис. 15.7). Двухступенчатая схема волновой передачи позволяет получать передаточные отношения до нескольких тысяч.
Рис. 15.7
1
2
Г
1
Внешняя среда
По сравнению с планетарными передачами волновые имеют большие КПД, точность и меньший мертвый ход. К недостаткам волновых передач относятся сложность изготовления и невозможность получения малых передаточных отношений (меньше 50).
Применяются волновые передачи в кинематических и силовых приводах с большим передаточным отношением; в отсчетных устройствах повышенной точности; как привод для передачи движения в герметизированное пространство.
studopedia.su - Студопедия (2013 - 2024) год. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав!Последнее добавление