В приборостроении наибольшее распространение получили механизмы винт – гайка с трением скольжения. Они просты по конструкции, позволяют осуществлять точные перемещения, надежно работают при ударных нагрузках. К недостаткам таких механизмов помимо низкого КПД относят повышенный износ рабочих поверхностей винтовых пар.
Показателями точности винтовых механизмов являются кинематическая погрешность и мертвый ход.
Кинематическая погрешность dj зависит от накопленной погрешности шага резьбы и допусков на монтажные радиальные и осевые биения винта, т.е. от ошибок его изготовления и сборки.
Гораздо больше на точность винтовых механизмов влияет мертвый ход, возникающий за счет зазоров в винтовой паре. Величина зазора между винтом и гайкой зависит не только от износа, т.е. условий эксплуатации; мертвый ход можно значительно уменьшить, предусмотрев в механизме устройство его выборки. Точные винтовые механизмы снабжают обычно устройствами для выборки бокового зазора в резьбе.
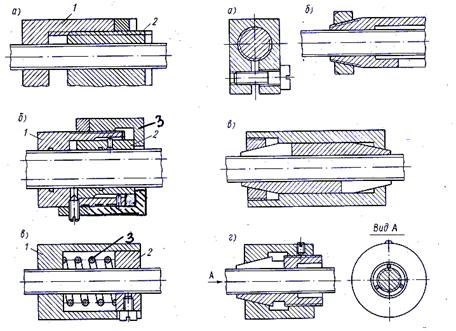
Различают два способа выборки мертвого хода – путем осевого и радиального смещения гайки. Осевая выборка зазора целесообразна для прямоугольных и трапецеидальных резьб, т.е. резьб с малым углом профиля резьбы a. Радиальная выборка зазора рекомендуется для метрических резьб с треугольным профилем.
Варианты конструкций с осевой выборкой зазора в паре винт-гайка представлены на рис. 16.5. Гайка обычно выполнена из двух частей 1 и 2. На рис. 16.5, а смещение частей гайки в осевом направлении происходит с помощью мелкой резьбы (внешней на части 1 и внутренней на части 2). При регулировке меняется осевое и радиальное взаимное положение частей гайки, что не всегда нужно. Конструкция, представленная на рис. 16.5, б, обеспечивает при регулировке только осевое смещение частей гайки 1 и 2. В конструкции, представленной на рис. 16.5, в, осевое смещение частей гайки достигается не жесткой, а эластичной регулировкой осевого зазора с помощью пружины сжатия 3.
На рис. 16.6 представлены варианты конструкций с радиальной выборкой зазора в паре винт-гайка: с разрезной гайкой и стяжным винтом (рис. 16.6, а); с разрезной гайкой и цанговыми зажимами (рис. 16.6, б – г). Преимущество цангового зажима состоит в равностороннем обжатии винта, что способствует его равномерному износу.
1
в
г
в
б
б
а
а
2
3
1
2
3
1
А
Вид А
2
Рис. 16.5 Рис. 16.6
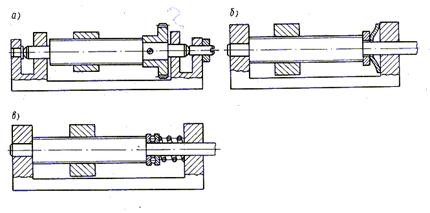
На точность винтовых механизмов влияет также осевой зазор между винтом и опорной базой. Устраняется он выборкой зазора с помощью осевых упоров с шаровыми опорными поверхностями (рис. 16.7, а) и выборкой зазора с помощью тарельчатой (рис. 16.7, б) или винтовой (рис. 16.7, в) пружины.
Рис. 16.7
в
а
б
Износостойкость винтовой пары обеспечивается правильным выбором материалов винта и гайки по значению допустимого давления qadm на поверхности резьбы, определяемого по формуле
q£ qadm или 4F/[np(d2–d12)] £ qadm, (16.8)
где F – осевое усилие на винте; d и d1 – соответственно наружный и внутренний диаметры резьбы; n» 6 – расчетное число витков гайки.
Для винтовой пары, состоящей из бронзовой гайки и стального винта, допустимое удельное давление qadm = 7 … 9 МПа.
Высота гайки Н равна
Н ³ np, (16.9)
где р – шаг резьбы.
Глава 17. Механизмы прерывистого движения
Работа ряда переключающих устройств в системах настройки и управления, устройств транспортирования, полуавтоматических и автоматических технических систем требует наличия периодических остановок определенной длительности, прерывистости движения ведомого звена. Для получения такого движения кроме кулачковых механизмов применяют мальтийские и храповые механизмы, а также механизмы с неполными зубчатыми колесами.
studopedia.su - Студопедия (2013 - 2024) год. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав!Последнее добавление