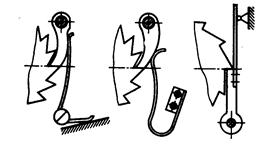
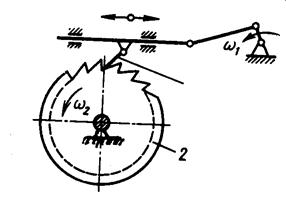
Храповые механизмы позволяют получить прерывистое, с остановами, вращательное или поступательное движение (рис. 17.5).
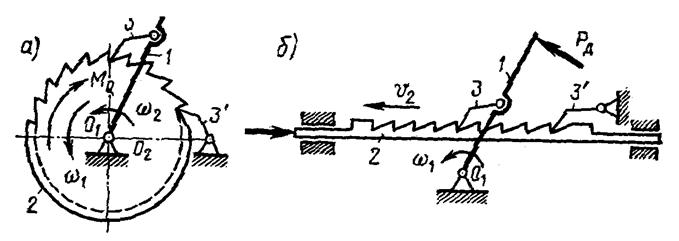
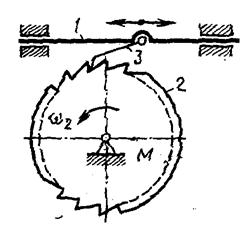
Простейший храповый механизм состоит из ведущего звена 1, совершающего качательное (рис. 17.5, а, б) или возвратно-поступательное (рис. 17.5, в) движение; ведомого звена 2 – храпового колеса (рис. 17.5. а, в) или храповой рейки (рис. 17.5, б) с зубьями специального профиля и неподвижного звена (стойки). Движение от ведущего звена 1 к ведомому 2 передается с помощью собачки 3, шарнирно закрепленной на ведущем звене. При движении ведущего звена в рабочем направлении (w1, v1) собачка 3 упирается в зуб ведомого звена и перемещает его. При возвращении ведущего звена и собачки 3 в исходное положение храповое колесо (рейка) остается неподвижным. Фиксация ведомого звена обеспечивается трением в опорах звена, тормозом или стопорной собачкой 3¢, нейтрализующих действие сил или моментов сил (Fc, Mc) полезного сопротивления.
б
а
v1
3
1
Fдв
С
Fc
в
Мс
Рис. 17.5
Храповые (зубчато-рычажные) механизмы применяют в устройствах транспортирования с прерывистым движением; в реле времени; шаговых искателях; механических и электрических часах и других устройствах.
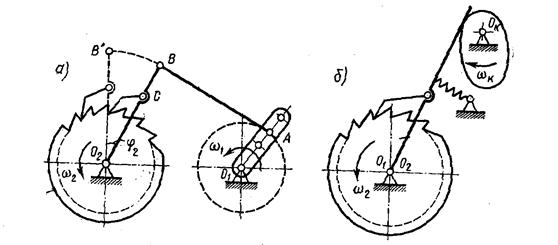
Зацепление собачки с ведомым звеном может быть внешним и внутренним. Большее распространение получили механизмы с внешним зацеплением как более простые по конструкции и изготовлению. Роль ведущего звена с собачкой храповых механизмов выполняют рабочие звенья других механизмов: шарнирного четырехзвенника (рис. 17.6, а), кулачкового (рис. 17.6, б), кривошипно-ползунного (рис. 17.6, в).
В качестве исходных данных при проектировании храпового механизма задают габаритные размеры узла, угол поворота храпового колеса j2 (см. рис. 17.6, а) за один ход собачки, момент сопротивления Мс. Число зубьев храпового колеса z определяется как z = 2π/j2. Количество зубьев на храповом колесе принимают равным 8 … 48, однако предпочтительнее z = 12 … 20.
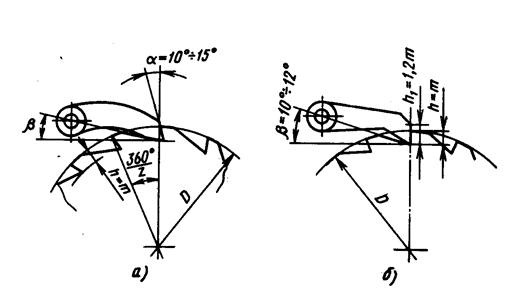
Основной параметр, модуль m, выбирают по заданному габаритному размеру, наружному диаметру D (рис. 17.7) храпового колеса
m = D/z. (17.10)
б
а
Рис. 17.6
в
Стандарт рекомендует следующий ряд значений модуля: 0,60; 0,8; 1,0; 1,25; 1,5; 2,0 и 2,5 мм. Окружной (храповое колесо) или линейный (рейка) шаг равен р = p m. Профиль зуба у колеса может быть с поднутрением (рис. 17.7, а) или без него (рис. 17.7, б). Угол поднутрения a = 10 … 15° улучшает надежность зацепления при передаче движения, стопорение. Высота зуба h = m, высота опорной части собачки h1 = 1,2m. Храповые колеса с профилями зубьев без поднутрения применяются для гарантированного полного захода собачки во впадину между зубьями.
б
а
Рис. 17.7
Для надежного зацепления между собачкой и зубом большое значение имеет расположение оси качания собачки относительно касательной к окружности впадин зубьев. Собачка не выталкивается, а удерживается во впадине зуба без дополнительного усилия, когда ось качания собачки расположена выше касательной к окружности впадин, т.е. когда b = 10 … 12° (см. рис. 17.7).
Длину зуба храпового колеса принимают исходя из условия ограничения удельной нагрузки q на линии контакта зуба и собачки
b ³ 2Mc kд/Dqadm, (17.11)
где kд = 1,2 … 1,5 – коэффициент динамичности; qadm – допускаемая удельная нагрузка (нагрузка на единицу длины), Н/мм.
Храповые колеса изготавливают из среднеуглеродистых сталей 40, 45, 50 и закаливают до HRC 48 … 50, а собачку из стали 20Х цементируют на глубину 0,8 … 1 мм и закаливают до HRC 50 … 55. При этом qadm = 400 Н/мм. В малонагруженных передачах возможно изготовление храповых колес из легких сплавов и пластмасс, латуни ЛК80-3, бронзы.
Для обеспечения надежной работы храпового механизма при любом положении в пространстве и в условиях вибрации собачки прижимают к колесу пружинами. На рис. 17.8 приведены конструкции стопорных собачек, установленных на корпусе механизма, и способы их прижатия к храповому колесу.
Погрешность храпового механизма оценивают ошибкой угла поворота Dj2 храпового колеса на один зуб [4]
, (17.12)
где Dр – ошибка шага зубьев; – накопленная ошибка шага на дуге 180° (не должна превышать 0,2 мм); Dj – ошибка угла впадин между зубьями храпового колеса.
studopedia.su - Студопедия (2013 - 2024) год. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав!Последнее добавление
 , (17.12)
, (17.12) – накопленная ошибка шага на дуге 180° (не должна превышать 0,2 мм); Dj – ошибка угла впадин между зубьями храпового колеса.
– накопленная ошибка шага на дуге 180° (не должна превышать 0,2 мм); Dj – ошибка угла впадин между зубьями храпового колеса.