КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Линейные шаговые двигатели
|
|
|
|
| Ш |
аговые двигатели, рассмотренные выше, являются вращающимися машинами с обеспечением вращения как по ходу, так и против хода часовой стрелки. Однако большое число механизмов требует линейного перемещения рабочих органов (координатные перемещения механизмов подач станков с ЧПУ, графопостроителей ЭВМ, механизмов печатающих устройств ЭВМ, промышленных роботов и т.д.). В этих случаях преобразование вращательного движения в поступательное осуществляется с помощью различных кинематических механизмов. Последние являются источни-ками потерь мощности и, что особенно важно для прецизионных меха-низмов, вносят погрешность при отработке координатных перемещений. Применение линейных шаговых двигателей (ЛШД) позволяет упростить кинематическую схему, устранив элементы, преобразующие вращательное движение в поступательное. ЛШД обеспечивают линейное переме-щение рабочих органов. Видов линейных двигателей так же много, как и вращающихся; существуют линейные двигатели постоянного тока, асинхронные, синхронные и вентильные. ЛШД обладают известными преимуществами обычных вращающихся ШД и подобно им могут быть реактивными (ЛШД-Р), с постоянными магнитами (индукторными, гибридными) – ЛШД-И. Не различаются они также по принципу действия.
ЛШД можно представить как развернутый на плоскости ШД вращательного типа. В качестве примера рассмотрим ЛШД-И с двумя обмотками управления, изображенный на рис.15.1.

Рис. 15.1. Конструкция индукторного ЛШД-И:
1 – обмотки; 2 – магнитопроводы ротора; 3 – постоянный магнит;
4 – статор; I - IV– полюсы ротора
Подвижная часть ЛШД, называемая ротором, выполнена из электротехнической стали в виде двух П-образных магнитопроводов 2, на каждом из которых размещено по одной обмотке управления 1. Статор 4 представляет собой плиту из магнитомягкого материала; полюсы ротора и поверхность плиты, обращенная к нему, имеют зубчатую структуру. Подмагничивание магнитопроводовосуществляет постоянный магнит 3. Зубцовые деления тг статора и ротора равны. Зубцы полюсов ротора одного и того же магнитопровода сдвинуты относительно зубцов статора на тГ/2 (для полюсов Iи II) и на тГ/4 (для полюсов IIIи IV). В результате такой конструкции зубцы всех полюсов ротора имеют различное расположение относительно зубцов статора, но магнитное сопротивление потоку подмагничивания не зависит от перемещения ротора. Принцип работы ЛШД не отличается от ШД-И, с тем лишь иск-лючением, что вместо вращающего момента создается сила F, направленная в плоскости статора. В зависимости от наличия возбуж-дения обмоток ось магнитного потока перемещается от полюса к полю-су, например по схеме I–III–II–IV,в результате чего ротор перемещается на величину зубцового деления хГ. В каждом такте коммутации линей-ный шаг
|
|
|
Δx=τ2/k1,
где к1 – число тактов коммутации.
На основании рассмотренного ЛШД можно построить модуль, обес-печивающий перемещение одновременно по нескольким координатам. При этом отдельный ЛШД предназначен для перемещения лишь по од-ной координате.
Пример двухкоординатного модуля ЛШД приведен на рис. 15.2.
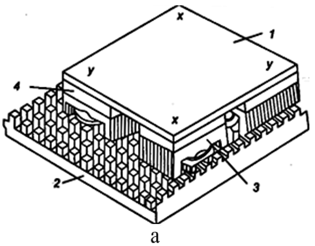
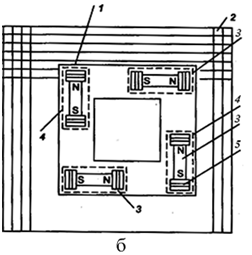
Рис. 15.2. Конструкция двухкоординатного линейного модуля (а)
и расположение его составных частей (б): 1 – ротор; 2 – статор;
3,4 – электромагнитные модули; 5 – постоянные магниты;
6 – обмотки возбуждения
Он состоит из магнитопровода подвижного ротора 1 и статора 2, представляющего собой плиту из магнитомягкого материала. На рабочей поверхности плиты выполнены две системы взаимно перпендикулярных зубцов. На роторе 1 расположены две системы электромагнитных моду-лей 3 и 4, предназначенных для перемещения по двум координатам (XY). Соответственно каждый модуль состоит из постоянных магнитов 5 и обмоток возбуждения 6. Модули, предназначенные для перемещения вдоль оси X, имеют зубцы, направленные вдоль этой оси. Это же касается оси Y. Принцип управления обмотками модулей по каждой из координат такой же, как и в однокоординатном модуле (см. рис.15.1). Для уменьшения сил трения в модулях на основе ЛШД применяют магнитно-воздушную подвеску. Ротор притягивается к статору магнит-ным притяжением полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, который приподнимает его над стато-ром. Между статором и ротором образуется воздушная подушка, в ре-зультате чего ротор подвешивается над статором с некоторым мини-мальным воздушным зазором. При этом и сопротивление движению ротора близко к нулю. Высокая точность позиционирования обеспе-чивается максимально мелкой нарезкой зубцовых делений. Приведем некоторые параметры модулей ЛШД: шаг 0,16; 0,32; 0,50 мм; максимальное усилие 84; 70; 20 Н. Воздушный зазор между статором и ротором составляет 15 мкм.
|
|
|
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 3267; Нарушение авторских прав?; Мы поможем в написании вашей работы!