КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Асинхронный линейный электропривод
Линейный электропривод
Математическое описание линейного двигателя
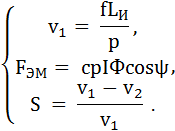
где v1, v2 – синхронная скорость бегущего поля и скорость бегунка;  – частота тока;
– частота тока;  – длинна индуктора; р – число пар полюсов в обмотке индуктора; FЭМ – электромагнитная сила, вызывающая движение бегун-ка.
– длинна индуктора; р – число пар полюсов в обмотке индуктора; FЭМ – электромагнитная сила, вызывающая движение бегун-ка.
Режимы работы и характеристики линейных электроприводов различается в зависимости от типа используемого двигателя рис.15.9.
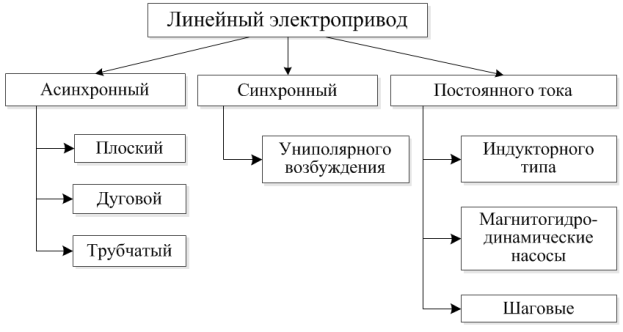
Рис. 15.9 Классификация линейных электроприводов
На рис. 15.10,а – представлена конструкция асинхронного ЭП вра-щательного движения, а на рис. 15.10,б – асинхронного линейного ЭП, которая представляет собой развертку первого с одинаковыми разме-рами статора и вторичного элемента. В зависимости от назначения ли-нейного привода конструктив может меняться. Вторичный элемент линейного двигателя (ЛД) не всегда снабжается обмоткой. Двигатель с конструктивной схемой вторичного элемента в виде металлического листа (полосы), рис. 15.10,а получил название двигателя с двусторон-ним статором. Вторичный элемент при этом может располагаться также между двумя статорами или между статором и ферромагнитным сердечником или с односторонним статором и сердечником рис. 2,г. Вторичный элемент выполняется из меди, алюминия или стали, причём использование не магнитного вторичного элемента предполагает приме-нение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы, как, например, на рис. 15.10в,г. Некоторое распространение получили сложные составные вторичные элементы с прилегающими друг к другу полосами из немагнитного и ферромагнит-ного материала, при этом ферромагнитная полоса выполняет роль части магнитопровода. Принцип действия линейных двигателей с вторичным элементом в виде полосы повторяет работу обычного асинхронного дви-гателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные АД, и подключаются обычно к сети трёхфазного переменного тока. Отметим, что ЛД часто работают в так называемом обращённом режиме движения, когда вторичный элемент неподвижен, а передвигается статор.
Такой ЛД, получивший название двигателя с подвижным статором, находит, широкое применение на электрическом транспорте.
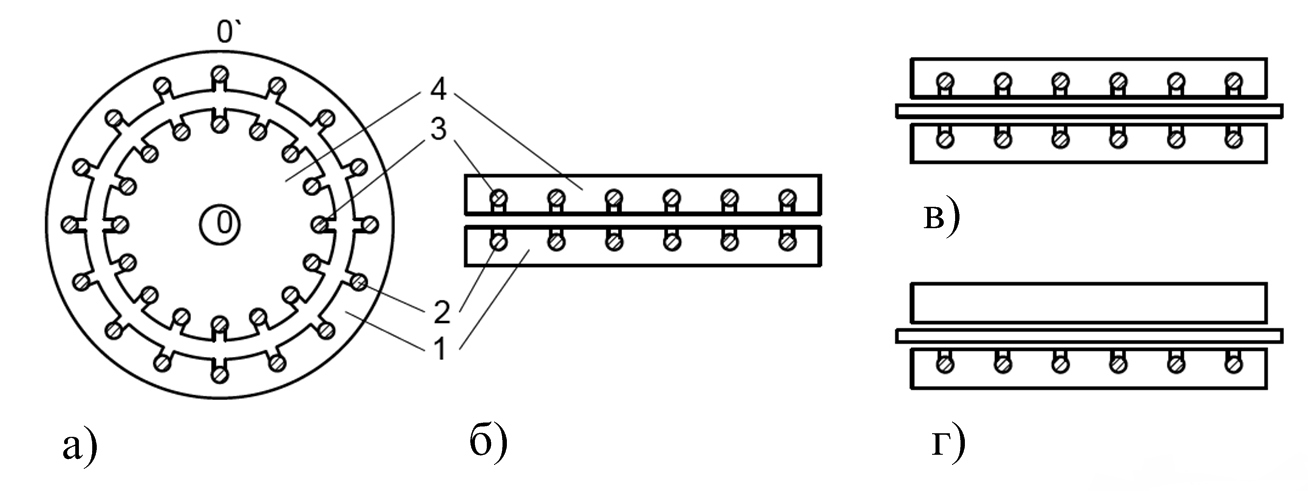
Рис. 15.10. Принцип построения линейного двигателя переменного тока:
а – обычный асинхронный электродвигатель, б – линейная конструкция
Дуговой двигатель. Дуговой двигатель характеризуется расположением обмотки на части окружности, как это показано на рис.15.11,а. Особенностью этого двигателя является зависимость частоты вращения его статора 1 от длины дуги, на которой располагаются обмотки 2 статора 3. Пусть обмотки статора располагаются на дуге, длина которой соответствует центральному углу α = 2τр, где τ – длина полюсного деления и p – число пар полюсов. Тогда за один период тока вращающееся поле статора совершит поворот на угол 2τр/р = α/р, а в течение одной минуты поле повернётся на  оборотов, т.е. будет иметь частоту вращения n, об/мин. Выбирая различные α, можно выпол-нять дуговые двигатели с различными частотами вращения ротора.
оборотов, т.е. будет иметь частоту вращения n, об/мин. Выбирая различные α, можно выпол-нять дуговые двигатели с различными частотами вращения ротора.
Трубчатый двигатель. Конструкция трубчатого линейного двигателя представлена на рис.15.11,б. Статор двигателя 1 имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки 2 (обмотки статора) и металлические шайбы 3, являющиеся частью магнитопровода. катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент 4 также трубчатой формы, выполнен-ный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнит-ное поле, которое индуктирует в теле вторичного элемента токи, направ-ленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создаёт на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением маг-нитного потока в отличие от плоского ЛД, в котором магнитный поток имеет радиальное направление.
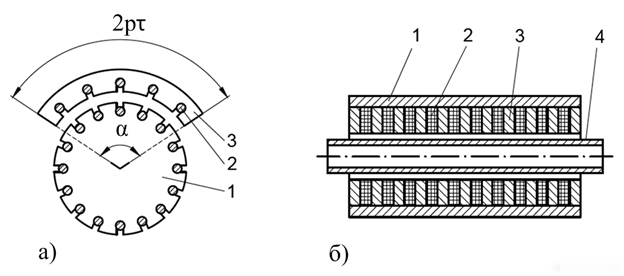
Рис. 15.11:а – дуговой электродвигатель б – трубчатый (коаксиальный) электродвигатель
На рис. 15.12 иллюстрируется работа ЛД на уровне взаимодействия сил отталкивания и притяжения. Три фазы линейного электропривода (нижняя часть) создают бегущее магнитное поле статора (нижняя часть), это магнитное поле индуцирует ток в обмотках ротора, который в свою очередь создает магнитное поле ротора. Здесь (рис. 15.11) верхняя и нижняя волны – магнитные поля ротора и статора соответственно. Так асинхронный линейный ЭП будет работать с некоторым скольжением как и в обычном АД. Сдвигающееся магнитное поле статора на некоторую величину (здесь 90°) будет вызывать силы притяжения и отталкивания со стороны ротора, за счет чего и происходит линейное движение привода.
Для асинхронного линейного двигателя:
 ,
,
где V – скорость продольного перемещения магнитного поля статора, τ – длина полюсного деления, f – частота питающей сети
|
|
Дата добавления: 2014-11-29; Просмотров: 3452; Нарушение авторских прав?; Мы поможем в написании вашей работы!