КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Определение линейных скоростей точек звеньев и угловых скоростей звеньев
|
|
|
|
При выполнении кинематического анализа механизма выбирается последовательно одно из положений механизма, для которого осуществляется следующие операции:
- составляются векторные уравнения для определения скоростей точек
звеньев механизма;
- записываются выражения для определения угловых скоростей
звеньев;
- задается масштаб плана скоростей;
- строится в заданном масштабе план скоростей;
- определяются величина и направление угловых скоростей звеньев;
Такие же операции выполняются для определения ускорений точек звеньев. Кинематический анализ выполним на примере одного из положений рассмотренного выше кривошипно-ползунного механизма (рисунок 2.2)
Рисунок 2.2 − Схема положения звеньев механизма
1. Составляем векторные уравнения скоростей точек звеньев.
VA =w1·OA, где VA ┴ OA, (2.1)
VВ = VА + VВА, где VB ║ X-X, VBA ┴ BA, (2.2) Примечание: Векторные величины в уравнениях здесь и далее будем обозначать жирным шрифтом, скалярные – обычным.
В уравнении (1) скорость т. А известна по направлению, а величину легко определить по заданным значениям угловой скорости ω, и длине начального звена ОА. Движение т. В в уравнении (2) можно разложить на переносно-поступательное со скоростью т. А и относительно-вращательное вокруг т. А. Не известные величины векторов скоростей VB и VBA, могут быть определены построением плана скоростей.
Для этого в качестве полюса плана скоростей выбираем точку p,откладываем от нее отрезок pа, предоставляющий собой скорость точки А в каком-либо произвольно выбранном масштабе, например, μ = VA/ ра м/с/мм.
При построении плана скоростей отрезок pа откладываем перпендикулярно вектору VA и, далее, от конца вектора pа откладываем отрезок ва, перпендикулярно вектору VBA и отрезок рв, параллельно оси Х-Х (рисунок 2.3).
|
|
|
Для определения истинных величин скорости VB и VBA, достаточно измеренные на плане отрезки рв и ва умножить на масштаб μ, получим
VB = μ · рв, VBA = μ · ва, (2.3)
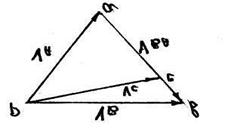
Рисунок 2.3 − План скоростей
Из плана скоростей можно определить скорость любой точки на звене (например, т. С на звене 2). Для этого необходимо использовать теорему подобия и составить пропорцию
СВ/АВ = св/ав, откуда св =ав ∙СВ/АВ, (2.4)
где СВ и АВ длины участков звеньев механизма.
Соединив полюс р с точкой с на плане скоростей, получим вектор, изображающий скорость точки с
тогда VC = рс ·μ, (2.5)
Для определения направления и величины угловой скорости звена 2 воспользуемся известным соотношением
VBA =w2 ·BA, (2.6)
откуда w2 = VBA/ BA, (2.7)
Направление угловой скорости совпадает с направлением вектора VBA . Проставляем направление w2 на звене 2 стрелкой.
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 775; Нарушение авторских прав?; Мы поможем в написании вашей работы!