КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Силовой анализ механизма
|
|
|
|
Задачей силового анализа (расчёта) является:
- определение реакций в кинематических парах механизма по известным внеш-ним силам.
- определение уравновешивающей силы, приложенной к начальному звену в т. А
- подбор мощности двигателя по уравновешивающей силе.
Силовой анализ (расчёт) механизма выполним на рассмотренном ранее простейшем кривошипно-ползунном механизме. Для этого вычертим в одном из положений механизм и приложим действующие на звенья внешние силы (рисунок 3.2). 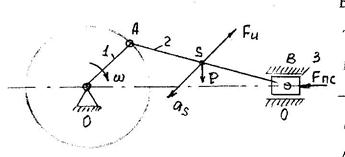
Рисунок 3.2 − Схема кривошипно-ползунного механизма
Силовой анализ начинается с последней присоединённой группы Ассура и заканчивается начальным звеном.
Этот механизм, как было выявлено ранее, состоит из группы Ассура
2-го класса, 2 порядка (звенья 2, 3) и механизма 1-го класса (звенья 0, 1).
Будем считать звенья 1, 3 невесомыми, тогда на звено 2 будут действовать внешняя сила инерции Fu и сила тяжести P, а на звено 3 – сила полезного сопротивления Fпс, (для ДВС − движущая сила) и реакции кинематических парах 0, 3; 1, 2.
Для определения реакций в кинематических парах 0, 3; 1, 2 вычерчиваем последнюю присоединенную группу Ассура (рисунок 3.4) и расставляем все внутренние и внешние силы, заменив действие звена 0 на звено 3 реакцией 0, 3, а действие звена 1 на звено 2 нормальной и тангенциальной реакциями F τ 12 и F n 12.
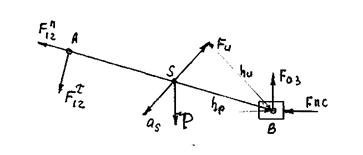 Под действием этих сил звенья находятся в равновесии.
Под действием этих сил звенья находятся в равновесии.
Рисунок 3.3 − Схема приложения внешних и внутренних сил к гр. Ассура
Составим уравнение равновесия группы Ассура
Fτ 12 + Fn12 + Fu + P + F03 + Fnc = 0 (3.7)
Известными в данном уравнении являются внешние силы Fu, P, и Fnc, неизвестными Fτ 12, Fn12 и F03. Тангенциальную составляющую Fτ 12 можно найти из условия равновесия моментов
|
|
|
∑MB = 0 Fτ12 · AB + P · hp –Fиhu = 0 (3.8)
откуда
Fτ 12 = Fu · hu – Php /AB (3.9)
Если получим результат со знаком «-» направление Fτ 12 следует поменять на противоположное.
Неизвестные Fn12 и F03 определим построением плана сил. Для этого зададимся масштабом сил. Пусть
µ = P / l (3.10)
где l – отрезок произвольной длины 50…100мм, соответствующий в масштабе силе Р.
Используя масштаб, найдём длины отрезков соответствующие внешним силам.
l Fпс = Fnc / µ, (3.11)
l Fu = Fu / µ, (3.12)
l Fτ 12 = Fτ 12 / µ. (3.13)
Построение плана сил целесообразно начинать с одной из неизвестных сил Fn12 или F03.
Выберем, например, силу Fn1,2. Так как длина отрезка, изображающая силу неизвестна, проведем произвольной длины линию, параллельную направлению силы Fn12.
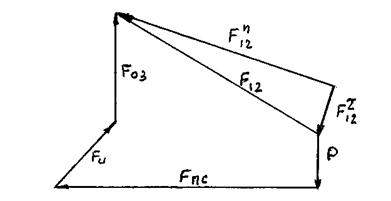 От этой линии с любого её конца откладываем последовательно отрезки l Fτ12,, l F, l P, l Fu. Последним откладываем отрезок (проводим линию) параллельный другой неизвестной силе F03. Силовой многоугольник замкнётся. Результирующей всех сил будет сила F12. (рисунок 3.5).
От этой линии с любого её конца откладываем последовательно отрезки l Fτ12,, l F, l P, l Fu. Последним откладываем отрезок (проводим линию) параллельный другой неизвестной силе F03. Силовой многоугольник замкнётся. Результирующей всех сил будет сила F12. (рисунок 3.5).
Рисунок 3.5 − План сил группы Ассура (звенья 2, 3).
Измерив длину отрезков l Fn12, l F12, l F03, и, умножив их на масштаб, получим численное значение этих сил (рисунок 3.5).
Fn12 = l Fn12 ∙ µ, (14)
F12 =l F12 ∙µ, (15)
F03 = l F03 ∙ µ. (16)
Рассмотрим теперь начальное звено. Вычертим начальное звено и стойку (звенья 0, 1 − рисунок 3.6). Для его уравновешивания необходимо ввести дополнительную силу, уравновешивающую все приложенные к начальному звену силы. Обозначим её через Fyр и приложим к т. А звена 1.
Рисунок 3.6 − Схема начального звена
Как видно из силового многоугольника (рисунок 3.5) результирующей всех сил, действующих на звенья 2, 3, является сила F12 приложенная к т..
Приложим к начальному звену все внешние и внутренние силы, при этом вместо результирующей силы F12, прикладываем равную ей по величине, но противоположно направленную силу F21 . Такими силами будут Fyр; F21; F01. Составим уравнение равновесия этих сил
|
|
|
Fyp + F21+ F01 =0. (3.17)
Неизвестную Fyp можно найти из уравнения равновесия моментов
Mo (F21) = M (Fyp) = 0, (3.18)
или F21 ∙ l21 – Fyp ∙ OA = 0, (3.19)
откуда Fyp = F21 ∙ l21/OA, (3.20)
Длину отрезка уравновешивающей силы найдем из соотношения
l Fyp = Fуp / µ, (3.21)
Построив план сил можно найти другую неизвестную силу F01. (рисунок 3.7) 
Рисунок 3.7 − План сил начального звена
Измерив длину отрезка F01 и, умножив её на масштаб, получим реакцию F01.
F01 = lF01 ∙ µ. (3.22)
По величине уравновешивающей силы можно определить необходимую мощность двигателя, приводящую весь механизм в движение.
4. Приведённые силы
При исследовании движения механизма, находящегося под действием заданных сил, удобно все силы, действующие на звенья, заменить силами, приложенными к одному из звеньев. При этом необходимо, чтобы робота на рассматриваемом возможном перемещении или мощность, развиваемая заменяющими силами, были соответственно равны сумме робот или мощностей, развиваемых силами, приложенными к звеньям исследуемых механизмов. Удовлетворяющие этим условиям силы называются − приведёнными силами.
Звено, к которому приложены приведённые силы, называется – звеномприведения, а точка приложения сил – точкой приведения. Обычно за звено приведения принимают начальное звено (рисунок 3.8).
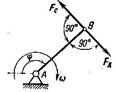
Рисунок 3.8 − Схема звена приведения
К точке В приложены две силы:
- Fд – приведённая движущая сила,
- Fс – приведённая сила сопротивления.
Движущая сила Fд должна производить роботу, равную работе всех движущих сил, а сила сопротивления Fс – работе всех сил сопротивления.
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 621; Нарушение авторских прав?; Мы поможем в написании вашей работы!