КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Динамический анализ
|
|
|
|
Контроль точности определения уравновешивающей.
Cравниваем значения сил, полученные методом планов и методом Н. Е. Жуковского. Определим относительную ошибку:
∆ Рур = [2·|Ржур – Рур| / (Ржур + Рур)]·100 %
∆ Рур = [ ]·100 % =
Основные задачи динамического анализа: определение средней мощности двигателя и определение момента инерции маховика по диаграмме энергомасс.
В общем случае скорости точек ведущего звена механизма, при установившемся движении механизма, являются величинами переменными, т.е. в истинном движении механизма имеет место неравномерность его хода. Маховики используются для регулирования периодических колебаний скорости внутри цикла установившегося движения машины.
Подбором массы и момента инерции маховика можно заставить начальное звено механизма или машины двигаться с заранее заданным отклонением от некоторой его средней скорости.
Исходные данные:
угловая скорость начального звена,  :
:  ;
;
коэффициент неравномерности хода: 
массы звеньев,  :
:  ,
,  ,
, 
длины звеньев,  :
:  ;
;  ;
;
диаметр поршня,  :
:  ;
;
индикаторная диаграмма
Коэффициент неравномерности хода механизма определяется по формуле:
 (1)
(1)
где  ,
,  ,
,  – соответственно максимальная, минимальная и средняя угловые скорости ведущего звена. При этом средняя угловая скорость определяется из уравнения:
– соответственно максимальная, минимальная и средняя угловые скорости ведущего звена. При этом средняя угловая скорость определяется из уравнения:
 (2)
(2)
Решая совместно выражения (1) и (2), получим выражение для определения максимальной и минимальной угловых скоростей ведущего звена:
где  .
.
Т.е необходимо обеспечить колебание угловой скорости ведущего звена в диапазоне:


При исследовании механизма, находящегося под действием заданных сил, удобно все силы, действующие на звенья, заменить силами, приложенными к одному из звеньев механизма. Тогда для изучения движения всего механизма достаточно знать закон движения звена приведения. Это условное звено будет своеобразной динамической моделью механизма.
|
|
|
Для построения динамической модели механизма все движущие силы и силы сопротивления, приложенные к нему, заменим приведенным моментом движущих сил и приведенным моментом сил сопротивления, приложенными к начальному звену (звену приведения). Аналогичным образом, массы всех звеньев (точнее говоря их инертности) также приведем к начальному звену и заменим суммарным приведенным моментом инерции  , который будет является, таким образом, эквивалентом всей инертности механизма.
, который будет является, таким образом, эквивалентом всей инертности механизма.
4.1 По заданным значениям  с помощью уравнения мгновенных мощностей для всех положений механизма определим значения приведенных моментов движущих сил и построим диаграмму
с помощью уравнения мгновенных мощностей для всех положений механизма определим значения приведенных моментов движущих сил и построим диаграмму  в функции угла поворота звена приведения (в масштабе -
в функции угла поворота звена приведения (в масштабе -  ).
).
1) Определим с помощью заданной индикаторной диаграммы значения силы сопротивления при каждом положении механизма по формуле
 , Н
, Н
где
–  – давление на поршень, атм. (берется с индикаторной диаграммы для каждого положения поршня).
– давление на поршень, атм. (берется с индикаторной диаграммы для каждого положения поршня).
–  – диаметр поршня, мм.
– диаметр поршня, мм.
Полученные значения заносим в таблицу 4.1.
Таблица 4.1 – Приведённый момент силы сопротивления 
| Положения |

| 
| 
|  , ,
| 
|
2) Определим значение приведенного момента силы полезного сопротивления для каждого положения механизма по формуле

 – значение силы сопротивления в i-ом положении механизма,;
– значение силы сопротивления в i-ом положении механизма,;
|
|
|
 – скорость точки приложения силы полезного сопротивления (точки B);
– скорость точки приложения силы полезного сопротивления (точки B);
Полученные значения заносим в таблицу 4.1:
3) Выбираем масштаб диаграммы приведённого момента сил сопротивления:


Вычисляем для каждого положения ординату диаграммы:

Значения  ординат диаграммы для каждого положения заносим в таблицу 4.1
ординат диаграммы для каждого положения заносим в таблицу 4.1
4) Строим диаграмму приведённого момента сил сопротивления  в выбранном масштабе на листе формата А1.
в выбранном масштабе на листе формата А1.
4.2 С помощью метода графического интегрирования строим диаграмму изменения работ сил полезных сопротивлений –  .
.
Масштаб диаграммы – 
где Н – полюсное расстояние, 

4.3 Строим диаграмму работ движущих сил  в виде прямой линии, соединяющей начало координат с крайней точкой диаграммы , так как за цикл установившегося движения
в виде прямой линии, соединяющей начало координат с крайней точкой диаграммы , так как за цикл установившегося движения  . Линейная зависимость объясняется тем, что у технологических машин момент движущих сил принимают постоянным.
. Линейная зависимость объясняется тем, что у технологических машин момент движущих сил принимают постоянным.
Графическим дифференцированием диаграммы работ движущих сил при полюсном расстоянии Н строим диаграмму приведенного момента движущих сил  .
.
По диаграмме определяем приведенный момент движущих сил:

4.4 Строим диаграмму изменения кинетической энергии за цикл –  , вычитая из ординат диаграммы ординаты диаграммы , т.е
, вычитая из ординат диаграммы ординаты диаграммы , т.е  .
.
Масштаб диаграммы :

Значения изменения кинетической энергии в каждом положении, Дж:
Все необходимые для построения диаграммы значения заносим в таблицу 4.2
Таблица 4.2 – Изменение кинетической энергии
| Положения | 
| 
| 
| 
|
4.5 Вычисляем изменение приведенного момента инерции звеньев механизма для всех его положений. Строим диаграмму 
1) Определим кинетическую энергию механизма в каждом положении
Для звена 1 (кривошип), совершающего вращательное движение:

где  – момент инерции звена относительно оси, проходящей через мгновенный центр вращения О,
– момент инерции звена относительно оси, проходящей через мгновенный центр вращения О,
Для 2 звена (шатун), совершающего плоско-параллельное движение:
|
|
|
где  , – скорость центра масс 2 звена;
, – скорость центра масс 2 звена;
 – момент инерции звена относительно оси, проходящей через центр масс звена,
– момент инерции звена относительно оси, проходящей через центр масс звена,
Для 3 звена, движущегося поступательно:

Кинетическая энергия всего механизма: Т = ∑ Тк, Дж.
2) Вычислим изменение приведенного момент инерции механизма в каждом положений.
Все данные заносим в таблицу 4.3
Таблица 4.3 – Изменение приведённого момент инерции механизма
| 1 звено | 2 звено | 3 звено | механизм | |||||||

| ||||||||||

| ||||||||||
| Поло жение |  , ,
| 
| 
|  , ,
| 
|  , ,
| 
| 
| 
| 
|
3) Строим диаграмму приведённого момента инерции:
Масштаб диаграммы: 
4.6 Исключая графически общий параметр  из диаграмм и
из диаграмм и  строим диаграмму Виттенбауэра
строим диаграмму Виттенбауэра  .
.
4.7 Определяем момент инерции маховика и его размеры.
1) К диаграмме Виттенбауэра сверху и снизу проводим касательные, углы наклона которых соответствуют максимальному и минимальному значениям угловой скорости кривошипа.
Тангенсы углов наклона касательных вычисляем по формулам
 ,
, 
 ,
, 
2) Замеряем отрезок  , отсекаемый касательными линиями на оси
, отсекаемый касательными линиями на оси  , находим момент инерции маховика по формуле
, находим момент инерции маховика по формуле
 .
.


3) Определяем основные размеры и массу маховика.
Маховик конструктивно выполним в виде массивного обода, соединенного со ступицей спицами.
При конструировании маховика в виде обода со спицами случае рекомендуется принимать:

Основные размеры маховика показаны на рисунке 4.1
|
|
|
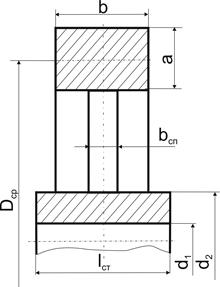
Рисунок 4.1 Эскиз маховика
Введем обозначения:  ,
, 
Основные формулы для расчета размеров маховика.
Средний диаметр маховика вычисляем по формуле:
 – плотность материала: для стали
– плотность материала: для стали  , для чугуна
, для чугуна 
Рекомендуется принимать:  ,
, 
ширина обода маховика:  ,
,
высота обода маховика: 
наружный диаметр маховика: 
масса обода маховика:  .
.
Согласно расчетам по приведенным выше формулам, получим:




Во избежание разрывов обода под действием центробежных сил принимаются следующие предельные значения окружной скорости:
для чугуна -  , для стали -
, для стали -  .
.
Окружную скорость на ободе определяем по формуле:
Масса обода маховика: 
Остальные размеры маховика определим из следующих эмпирических зависимостей:
диаметр отверстия для посадки на вал
 ;
;
диаметр ступицы маховика

длина ступицы

толщина диска, соединяющего обод со ступицей

Вычерчиваем маховик с найденными размерами в выбранном масштабе.
4.8 Исследование установившегося режима работы механизма.
1) Среднюю мощность двигателя определим по формуле:
где  – приведенный момент движущих сил (определен в пункте 4.3);
– приведенный момент движущих сил (определен в пункте 4.3);
 – угловая скорость звена приведения
– угловая скорость звена приведения

2) Построим график изменения угловой скорости вала кривошипа в установившемся движении без маховика и с установленным маховиком.
Изменение угловой скорости ведущего звена определяем по формулам
без маховика:
с маховиком:
где  и
и  – изменение кинетической энергии (таблица 4.2) и приведенного момента инерции (таблица 4.3);
– изменение кинетической энергии (таблица 4.2) и приведенного момента инерции (таблица 4.3);
 – значение приведенного момента инерции в нулевом положении,
– значение приведенного момента инерции в нулевом положении,
 – скорость ведущего звена в начале установившегося движения;
– скорость ведущего звена в начале установившегося движения;
Результаты расчетов заносим в таблицу 4.4
Таблица 4.4 Изменение угловой скорости ведущего звена без учета и с учетом маховика
| Поло жение | 
| 
| 
| 
| 
|
По результатам расчетов строим график (рисунок 4.2).
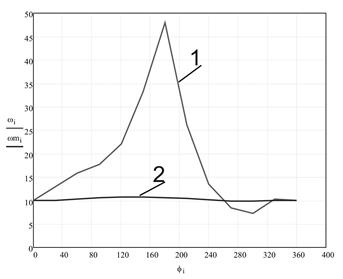
Рисунок 4.2 – Изменение угловой скорости ведущего звена в установившемся режиме: 1 – без маховика, 2 – с маховиком
Определим среднюю скорость установившегося движения: 
и действительный коэффициент неравномерности хода: 
Без маховика:


С установленным маховиком:


Вывод: установка маховика позволяет снизить неравномерность хода ведущего звена машины и обеспечить движение с заранее заданным отклонением от номинальной скорости.
|
|
|
|
|
Дата добавления: 2015-06-30; Просмотров: 591; Нарушение авторских прав?; Мы поможем в написании вашей работы!