КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Анализ устойчивости системы автоматического регулирования
|
|
|
|
Расчет динамики системы автоматического регулирования
Структурная схема САР тиристорного электропривода в динамике имеет вид:
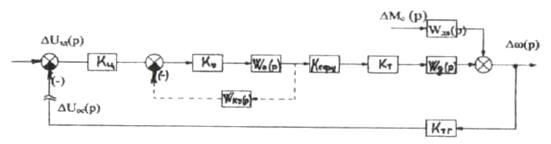
Рис. 4-Структурная схема САР тиристорного электропривода в динамике
Определяем динамические характеристики отдельных звеньев структурной схемы. Звенья с коэффициентами передачи Кц, Ку , Ксфу, Кт, Ктг считаем безынерционными. На входе системы импульсно – фазового управления установлено апериодическое звено с передаточной функцией,

где То=0,007с
Передаточная функция двигателя по управляющему воздействию имеет вид:
Выражение для передаточной функции двигателя необходимо привести к виду передаточных функций типовых динамических звеньев.
Рассчитываем момент инерции, приведенный к валу двигателя по формуле:

Определяем коэффициенты передачи двигателя:
Определяем постоянные переменные:
-электромеханическую:
-электромагнитную:
При этом выполняется соотношение: Тм>4Тэ, 0,7>0,0073·4=0,03
В этом случае знаменатель передаточной функции может быть представлен в виде: (Т1р+1)(Т2р+1)
Для определения постоянных времени Т1 и Т2 решаем уравнение:
ТмТэр2+Тмр+1=0,


Передаточная функция разомкнутой системы по управляющему воздействию:

Принимаем для расчета наибольший коэффициент усиления разомкнутой системы, который имеет место при работе на НДПР, Кр=613

Проанализируем устойчивость системы с помощью логарифмического критерия. Для этого строим амплитудно-частотную характеристику (ЛАХЧ) Lнс(ω) и логарифмическую фазово – частотную характеристику (ЛФХЧ) φнс(ω) по передаточной функции Wр(р).
Построение графика ведем в следующем порядке:
1-строим оси Lнс(ω) и ω, выбираем масштабы Lнс(ω) и ω;
|
|
|
2-определяем величину 20lgКр, и откладываем ее на оси ординат против отметки 0 декад,
20lgКр=20lg 2017=66,6 дБ.
3- находим сопрягающие частоты и наносим их на оси частот
 lgωс1=lg1= 0 дек;
lgωс1=lg1= 0 дек;
 lgωс2=lg142,9=4,9 дек;
lgωс2=lg142,9=4,9 дек;
 lgωс3=2,16дек;
lgωс3=2,16дек;
логарифмическая фазово – частотная характеристика (ЛФХЧ) φнс(ω) строится путем алгебраического суммирования логарифмических фазовых, частотных характеристик апериодических звеньев φ1(ω), φ2(ω), φ3(ω) с
постоянными времени Т1,,Т2,Т0,
Фнс(ω) = φ1(ω)+ φ2(ω)+ φ3(ω),
где φ1(ω)=-arctgТ1ω=-arctg 0,018ω
φ2(ω)=-arctgТ2ω=-arctg 0,0008ω
φ3(ω)=-arctgТ3ω=-arctg 0,007ω
Результаты расчета заносим в таблицу.
Таблица 2 - Результаты расчетов
| ω | с-1 | 0,1 | 0,5 | |||||||
| lgω | дек | -1 | -0,3 | 0,7 | 1,7 | 2,7 | ||||
| Т1 ω | 0,1 | 0,5 | ||||||||
| arctg T1(ω) | эл.град. | -5о7' | -8о5' | -45о | -74о1' | -84о3 | -89о3' | -89о7' | -90о | -90о |
| Т2 ω | 0,0007 | 0,0035 | 0,007 | 0,035 | 0,07 | 0,35 | 0,7 | 3,5 | ||
| arctg T2(ω) | эл.град. | -0 о | -0о12' | -0о24' | -2 о | -4 о | -29о | -35о | -74о | -82о |
| φ(ω) | эл.град. | -5о7' | -8 о 62' | -0 о 24' | -76о1' | -88о3' | -108о3' | -124о7' | -164о | -172о |
4.2 Синтез корректирующего устройства
Для придания системе устойчивости и требуемых показателей качества переходных процессов введем в систему параллельное корректирующее устройство. Корректирующей обратной связью охватываем усилитель вместе с апериодическим звеном с постоянной времени То, которое образовано выходным сопротивлением усилителя и емкостью на его выходе. Цепь подключения корректирующего устройства показана на структурной схеме пунктиром.
Синтез параллельного корректирующего устройства начинается с построения желаемой ЛАЧХ.
Исходными данными ее построения:
- допустимое время переходного процесса tпд = 0,06 с
- допустимая величина перерегулирования в системе 
Желаемая ЛАЧХ может быть разделена на три части:
|
|
|
- низкочастотную
- среднечастотную
- высокочастотную
Низкочастотная ЛАЧХ определяет точность работы системы в установленном режиме. Низкочастотная часть лежит в пределах от минимальных частот до частоты первого сопряжения.
Вид среднечастотной ЛАЧХ определяет в основном качество переходного процесса. При частоте среза ( ) наклон ЛАЧХ должен быть -20 дб ∕дек, причем чем длинней участок характеристики с наклоном - 20 дб ∕дек, тем меньше перерегулирование в системе. Время же переходного процесса тем меньше, чем больше частота среза. При построении желаемое ЛАЧХ необходимо сформировать среднечастотной участок так, чтобы удовлетворить заданным требованиям по времени переходного процесса и величине перерегулирования.
) наклон ЛАЧХ должен быть -20 дб ∕дек, причем чем длинней участок характеристики с наклоном - 20 дб ∕дек, тем меньше перерегулирование в системе. Время же переходного процесса тем меньше, чем больше частота среза. При построении желаемое ЛАЧХ необходимо сформировать среднечастотной участок так, чтобы удовлетворить заданным требованиям по времени переходного процесса и величине перерегулирования.
Требуемая минимальная частота среза желаемой ЛАЧХ может быть найдена по соотношению:
Где величина коэффициента Ко выбирается по кривой следующего рисунка в зависимости от допустимого перерегулирования. График для определения параметров желаемой ЛАЧХ показан на рис. 5.
Длиной центрального участка с наклоном - 20 дб ∕дек можно задавать по частотным интервалам. Требуемая величина второго интервала определяется в зависимости от  по кривой В = f(), приведенном на графике для определения параметров желаемой ЛАЧХ рисунок б. При этом запас по фазе при частоте
по кривой В = f(), приведенном на графике для определения параметров желаемой ЛАЧХ рисунок б. При этом запас по фазе при частоте  должен быть не менее 40 °.
должен быть не менее 40 °.
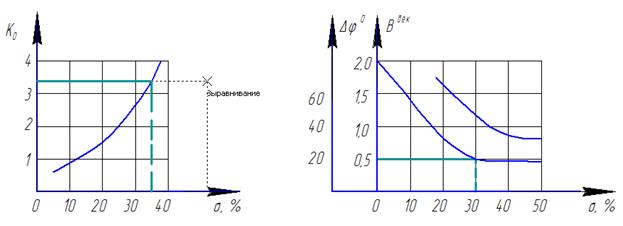
Рисунок 5 - Графики для определения параметров желаемой ЛАЧХ
Примем  среза желаемое равное 35 %
среза желаемое равное 35 %
На графике для определения параметров желаемой ЛАЧХ рисунок б, показана также зависимость величины перерегулирования от запаса устойчивости по фазе  . По этой кривой после построения ЛАЧХ и ЛФЧХ может быть приближенно найдена величина перерегулирования в системе.
. По этой кривой после построения ЛАЧХ и ЛФЧХ может быть приближенно найдена величина перерегулирования в системе.
Высокочастотная часть логарифмической частотной характеристики незначительно влияет на вид переходного процесса. Поэтому ее следует выбирать аналогичной ЛАЧХ нескорректированной системы с тем, чтобы усложнять корректирующее устройство.
Определяем параметр желаемой ЛАЧХ.
Требуемая частота среза
 =
= 
Принимаем частоту среза желаемой ЛАЧХ = lg = 2,2 дек.
Передаточная функция синтеза звеньев, неохваченных корректирующей обратной связью
|
|
|
где 
20lgКно=20lg1,13 = 22,6 дБ
Строим ЛАЧХ звеньев, неохваченных обратной связью Lку(ω). ЛАЧХ корректирующего устройства Lку(ω) получена вычитанием из ЛАЧХ неохваченных звеньев желаемой ЛАЧХ Lж(ω).
Lку(ω)= Lно(ω)- Lж(ω)
Lку(ω)= 22,6-50=27,4
20lg1,67 = 33,4 дБ
Следующим этапом является выбор системы корректирующего устройства и расчет его параметров.
Используя таблицы типовых корректирующих звеньев, устанавливаем, то требуемый вид ЛАЧХ корректирующего устройства может быть получен с помощью двух последовательно соединенных звеньев, передаточные функции имеют вид
W1(p)=  , W2(p)=
, W2(p)=  ,
,
Где T4=C2R4; T5=(R2+R4)C2 ; T6=R1C1; T7=(R1+R2)C1
Выражение для передаточной функции W1(p) записано для случая, ко гда сопротивление нагрузки первого звена стремится к ∞, что приближенно выполняется при условиях R1 << (R2 + R4) и C1 <<С.
С учетом указанных условий передаточная функция корректирующего устройства имеет вид:

 |  |
а) б)
а) электрическая схема; б) логарифмическая амплитудная частотная характеристика.
Рис 7 - Корректирующее звено
Для ЛАЧХ LКУ(ω) имеем:
 ;
;  ;
; 

определяем постоянные времени:
T5=1/ =1/1=1с
T6=1/  =1/2,5=0,4с
=1/2,5=0,4с
Построение логарифмической фазовой частотной характеристики φск(ω) выполняем по виду ЛАЧХ скорректированной системы. Частоты сопряжения  и
и  , где наклон ЛАЧХ скорректированной системы дополнительно изменяется на - 20дБ/дек, являются частотами сопряжения апериодических звеньев. Им соответствуют ЛФЧХ
, где наклон ЛАЧХ скорректированной системы дополнительно изменяется на - 20дБ/дек, являются частотами сопряжения апериодических звеньев. Им соответствуют ЛФЧХ  и
и  . Частота
. Частота  , где наклон ЛАЧХ дополнительно изменяется на +20 дб/дек, является частотой сопряжения реального дифференцирующего звена, ему соответствует ЛФЧХ
, где наклон ЛАЧХ дополнительно изменяется на +20 дб/дек, является частотой сопряжения реального дифференцирующего звена, ему соответствует ЛФЧХ  . Учитывая, что наклон низкочастотного участка Lж
. Учитывая, что наклон низкочастотного участка Lж  составляет -20 дБ/дек, проводим ЛФЧХ интегрирующего звена φи(ω)=-π/2
составляет -20 дБ/дек, проводим ЛФЧХ интегрирующего звена φи(ω)=-π/2
Уравнение ЛФЧХ φск(ω) имеет вид:
φск(ω)= φи(ω)+ φ2(ω) φ’(ω)+ φ”(ω)=-π/2- arctgT1ω- arctgT΄΄ω- arctgT΄ω,
где Т1=0,1с; T΄=0,25с; T΄΄=0,1с
φск(ω)=-π/2- arctg 0,1ω –arctg 0,25ω+ arctg 0,1ω
Данные расчетов заносим в таблицу:
Таблица 3 - Данные расчетов
| ω | с-1 | 0,1 | 0,5 | |||||||
| lgω | дек | -1 | -0,3 | 0,7 | 1,7 | 2,7 | ||||
| φ(ω) | -90о | -90о | -90о | -90о | -90о | -90о | -90о | -90о | -90о | |
| φ1(ω) | эл.град. | -5о7' | -8о5' | -45о | -74о1' | -84о3' | -89о3' | -89о7' | -90о | -90о |
| Т ' ω | 0,1 | 0,5 | ||||||||
| φ'(ω) | эл.град. | 5о7' | 26о6' | 45о | 78о7' | 84о 3' | 88о9' | 89о4' | 89о9' | 89о9' |
| Т" ω | 0,25 | 0,2 | 0,4 | |||||||
| φ"(ω) | эл.град. | -14о | -11о3' | -21о8' | -63о4' | -76о | -87о1' | -88о6' | -89о7' | -89о |
| φск(ω) | эл.град. | -104о | -74о3' | -66о8' | -148о8' | -166о | -177о7' | -178о4' | -179о8' | -180о |
|
|
|
2.5 Практическая реализация системы управления электропривода главного движения
|
|
|
|
|
Дата добавления: 2015-07-13; Просмотров: 497; Нарушение авторских прав?; Мы поможем в написании вашей работы!