КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приклади структур систем
Розглянемо приклади структур деяких систем більш докладно. На рис. 1.3
показано структурну схему найпростішої системи з управлінням. Об'єктом управління є система,над якою здійснюють управління.Вектор вихіднихзмінних Xout = {xoutl, xoutn ] характеризує стан об'єкта управління у певний момент часу. Вектор збурень F =,..., fkj характеризує вплив зовнішнього середовища на об'єкт управління. Вектор вхідних змінних Хіп ={хіп1,..., xjnm]
характеризує управляючі впливи, що робляться для приведення системи до заданого стану.
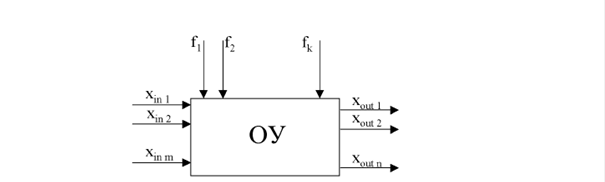
Рис. 1.3. Схема системи з управлінням
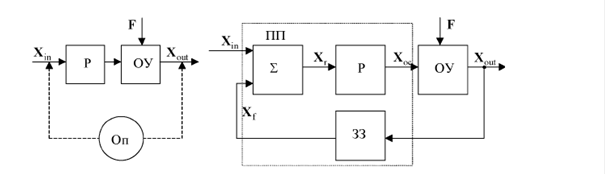
Наступні моделі відображають структури зі зворотними зв'язками. На рис. 1.4 показано схему управління за розімкненим й замкненим циклами. У
першому випадку між вхідними та вихідними змінними немає безпосереднього зв'язку. Він здійснюється через регулятор (Р) і об'єкт управління (ОУ).
Як правило управління за розімкненим циклом реалізується за допомогою людини - оператора (Оп), яка, спостерігаючи за значеннями вихідної величини, встановлює потрібні значення вхідних параметрів (рис. 1.4.а).
При управлінні за замкненим циклом (рис. 1.4.6) зміни вихідних величин передають на входи системи за допомогою сукупності пристроїв, які називають зворотним зв'язком (33). Вхідною величиною зворотного зв’язку є вихідна величина об’єкта управління Xout.
а б
Рис. 1.4. Схеми управління за розімкненим (а) й замкненим (б) циклами
Вихідну величину зворотного зв’язку будемо позначати Xf. Вона сумісно з вхідною величиною формує регулюючий вплив Хг на вході регулятора, який у свою чергу формує управляючий вплив Хос, що подається на вхід об’єкта управління.
 Функціональну схему системи автоматичного управління у загальному випадку можна подати (рис. 1.5) як сукупність таких функціональних компонентів: управляючий пристрій (УП), підсумовуючий пристрій (ПП), пристрій послідовного корегування (ППК), підсилювач (П), виконавчий елемент (BE), місцевий зворотний зв’язок (МЗЗ), об’єкт управління (ОУ) й головний зворотний зв’язок (ГЗЗ).
Функціональну схему системи автоматичного управління у загальному випадку можна подати (рис. 1.5) як сукупність таких функціональних компонентів: управляючий пристрій (УП), підсумовуючий пристрій (ПП), пристрій послідовного корегування (ППК), підсилювач (П), виконавчий елемент (BE), місцевий зворотний зв’язок (МЗЗ), об’єкт управління (ОУ) й головний зворотний зв’язок (ГЗЗ).
Рис. 1.5. Функціональна схема системи автоматичного управління
 Загальна схема процесу автоматизованого управління показана на
Загальна схема процесу автоматизованого управління показана на
рис. 1.6. Згідно з нею, автоматизоване управління можна визначити як управління з розімкненим зворотним зв’язком, контур якого містить ЕОМ і особу, що приймає рішення.
Як структури зі зворотним зв’язком зазвичай можна розглядати типові алгоритми математичного моделювання. Прикладом є відома з курсу чисельних методів блок-схема алгоритму розв’язування нелінійного алгебраїчного рівнян
| ня методом ділення навпіл, наведена на рис. 1.7. |
Рис. 1.6. Загальна схема автоматизованого управління
Наступні дві моделі відображають деревоподібні структурні схеми.
На рис. 1.8 зображено дерево цілей при розробці автоматизованої системи пошуку дефектів в рентгенівських знімках зварних швів1. Побудова дерева цілей є одним з основних етапів дослідження або проектування систем. Вона передбачає визначення головної мети, а також декількох ієрархічних рівнів часткових цілей, досягнення кожної з яких необхідно для досягнення пов'язаної з нею цілі вищого ієрархічного рівня.
1Методичні рекомендації щодо побудови дерева цілей та дерева проблем. - НУ "Львівська
політехніка" [Електронний ресурс]. - Режим доступу: http://asu.we. 1viv.ua/?part=librarv.metod

Рис. 1.7. Блок-схема алгоритму розв’язування нелінійного алгебраїчного рівняння методом ділення навпіл
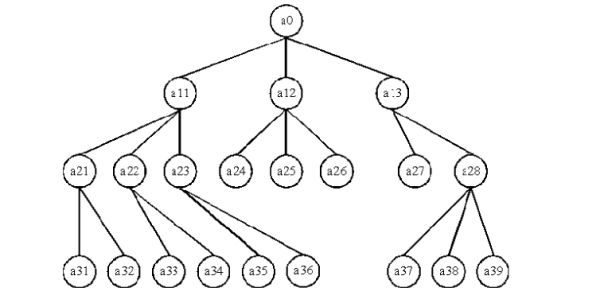
Рис. 1.8. Дерево цілей
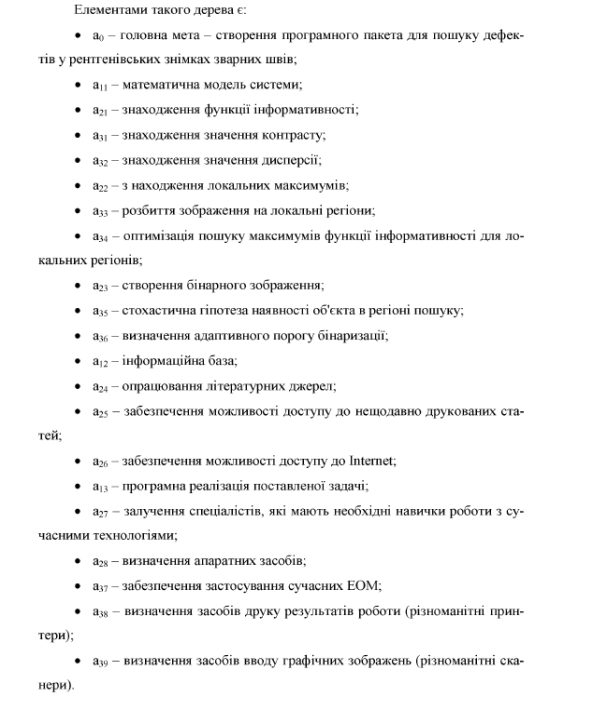
Елементами такого дерева є:
Іншим типовим прикладом деревоподібних структур є класифікаційні моделі. Необхідність їх побудови пов'язана з тим,що вони дають змогу визначати загальні властивості систем, що належать до певного класу, а також застосовувати типові моделі, методи дослідження й проектування таких систем. Зазвичай моделі класифікації на кожному рівні ієрархії вирізняють декілька підм-
ножин досліджуваної системи (підсистеми), що не перетинаються один з одним, але у сукупності містять усі її компоненти. Це призводить до деревоподібної структури ві дповідної класифікаційної моделі. Добре відомими зі шкільного курсу біології прикладами таких моделей є класифікації живих і рослинних організмів. Іншим прикладом є показана на рис. 1.9 модель класифікації польових транзисторів.
Лінійні структури можуть використовуватися при побудові простих алгоритмів, наприклад алгоритмів, що пов'язані з необхідністю виконання певної визначеної послідовності дій. їх також використовують при моделюванні деяких простих систем (RLC-контур в електродинаміці) або компонентів більш складних систем.
Типовими прикладами застосування матричних структур є організація структур даних, що використовуються у реляційних базах; розробка алгоритмів розв'язування задач аеро- та гідродинаміки методом скінчених елементів; проектування систем детектування випромінювань, розпізнавання й обробки зображень тощо.
Сітьові структури використовують при розробці алгоритмів складних розрахунків, що передбачають розгалуження й організацію циклів; проектуванні систем зв'язку, транспортних, електричних та інших мереж тощо.
|
|
Дата добавления: 2017-01-13; Просмотров: 474; Нарушение авторских прав?; Мы поможем в написании вашей работы!