КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
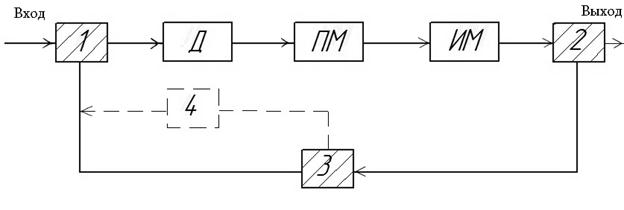
Система автоматического регулирования движения механизма
|
|
|
|
|
Обратную связь обеспечивает механизм 2, измеряющий выходной параметр (ω), регулятор 3, который принимает сигнал от механизма 2, сравнивает его с эталонным и в случае их рассогласования (до определенного предела) подает соответствующий сигнал на механизмы 1. регулирующий подачу энергии к машине. Основным элементом САР является регулятор от которого зависит точность работы. Из-за этого чисто используется непрямая САР имеющая дополнительно элемент 4 – усилитель сигнала вызываемого регулятора.
В МА наиболее распространены следующие типы регуляторов скоростей:
Центробежные, инерционные, тахорегуляторы.
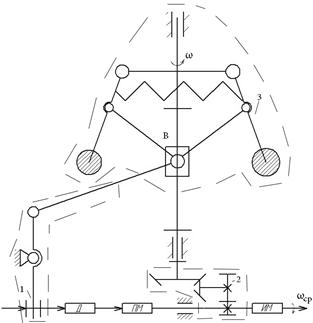
Более подробно рассмотрим работу машины с ц.б. регулятором.
Схема МА с центробежным регулятором скорости
| Работа регулятора |
Изменения угловой скорости соответствует интервалам [t1;t2]; [t3;t4] и характеризует динамику работы регулятора.
Для составления уравнения движения динамической модели машина с регулятором (для машин с 1 степенью свободы это нелинейное дифференциальное уравнение 3 порядка) необходимы конкретные технические данные машины.
Поэтому динамика движения машины с САР обычно используется в спецкурсах. Однако для успешной работы машины с САР необходимо выбрать основные физико-геометрические параметры регулятора так, чтобы он двигался в соответствии с вышесказанным. Для этого необходимо рассмотреть более простую задачу – кинетостатика регулятора т.е. его равновесное состояние при некоторой постоянной угловой скорости.
Кинетостатика Ц.Б. регулятора (регулятор как бы неподвижен ω = const)
Регулятор симметричен поэтому будем рассматривать только его половину
|
|
|
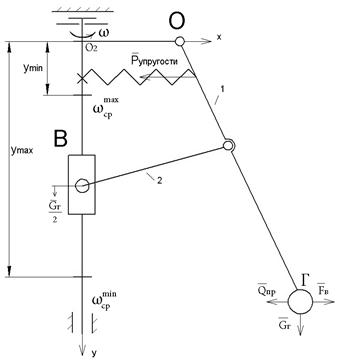
| На груз действуют |

| |
| Fи = - mгaг = - mг r ω2 = f1(r) | |
| -центробежная сила | |
| Qпр = f (Pупр, G, Gмуфты) = f2(r) | |
| -характеристика регулятора | |
| 1. При Fи = Qпр → r = const | |
| 2. При Fи < Qпр → r ↑ (увеличивается) | |
| 3. При Fи > Qпр → r ↓ (уменьшается) |
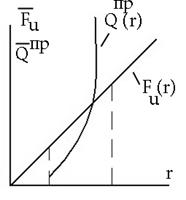
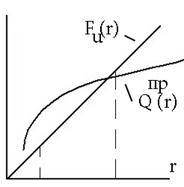
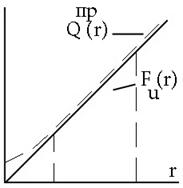
В зависимости от физико-геометрических размеров регулятора зависимость Qпр по отношению к Fи может иметь 3 характера:
| 
| 
|
| Устойчивая хар-ка регулятора | Неустойчивая хар-ка регулятора | Астатическая хар-ка на всем промежутке уравновешена |
Признак устойчивости должен выполняться во всех диаграммах изменения скоростей ωmin≤ ω ≤ ωmax и проектируемой Ц.Б. регулятора
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 379; Нарушение авторских прав?; Мы поможем в написании вашей работы!